 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEuclidean Distance-Optimal Post-Processing of Grid-Based Paths
May 09, 2021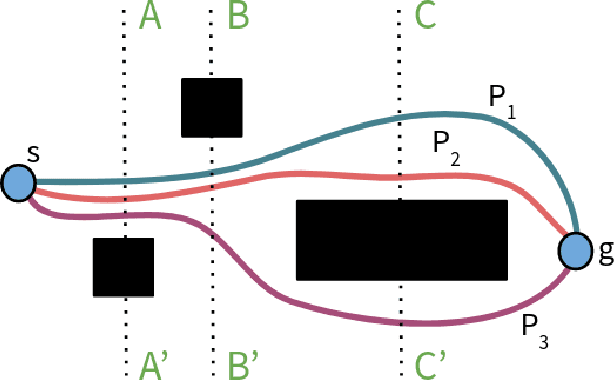
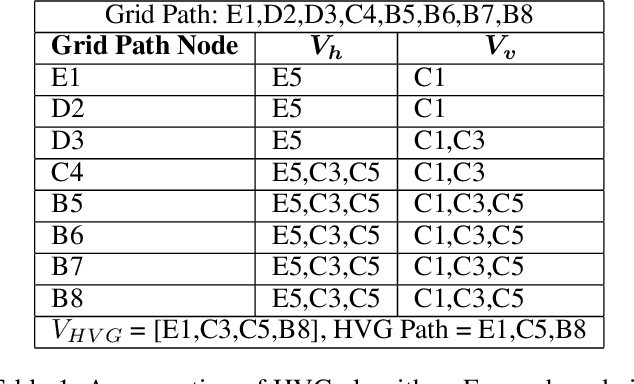
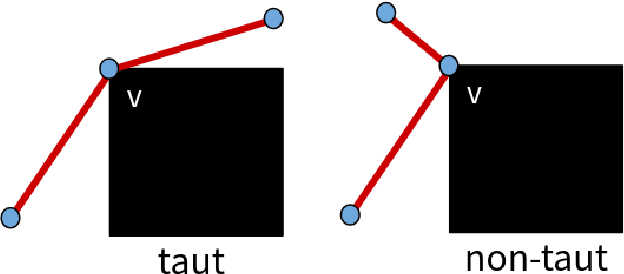
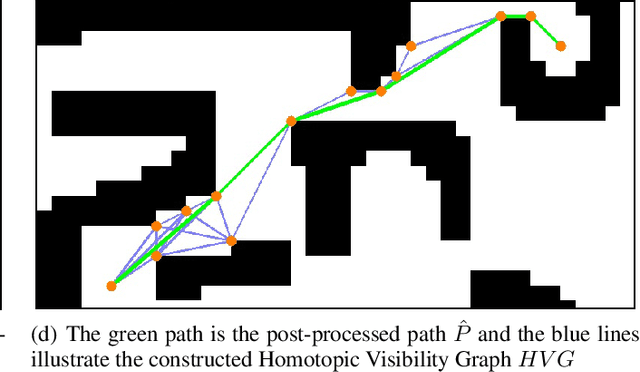
Paths planned over grids can often be suboptimal in an Euclidean space and contain a large number of unnecessary turns. Consequently, researchers have looked into post-processing techniques to improve the paths after they are planned. In this paper, we propose a novel post-processing technique, called Homotopic Visibility Graph Planning (HVG) which differentiates itself from existing post-processing methods in that it is guaranteed to shorten the path such that it is at least as short as the provably shortest path that lies within the same topological class as the initially computed path. We propose the algorithm, provide proofs and compare it experimentally against other post-processing methods and any-angle planning algorithms.
Deep Probabilistic Accelerated Evaluation: A Certifiable Rare-Event Simulation Methodology for Black-Box Autonomy
Jul 01, 2020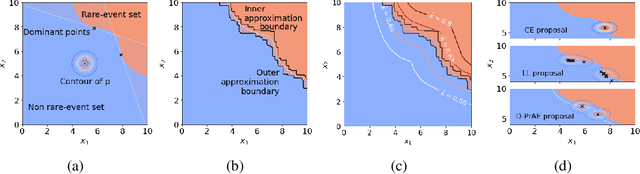



Evaluating the reliability of intelligent physical systems against rare catastrophic events poses a huge testing burden for real-world applications. Simulation provides a useful, if not unique, platform to evaluate the extremal risks of these AI-enabled systems before their deployments. Importance Sampling (IS), while proven to be powerful for rare-event simulation, faces challenges in handling these systems due to their black-box nature that fundamentally undermines its efficiency guarantee. To overcome this challenge, we propose a framework called Deep Probabilistic Accelerated Evaluation (D-PrAE) to design IS, which leverages rare-event-set learning and a new notion of efficiency certificate. D-PrAE combines the dominating point method with deep neural network classifiers to achieve superior estimation efficiency. We present theoretical guarantees and demonstrate the empirical effectiveness of D-PrAE via examples on the safety-testing of self-driving algorithms that are beyond the reach of classical variance reduction techniques.