 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnimotion: Unifying 3D Human Motion Synthesis and Understanding
Sep 24, 2024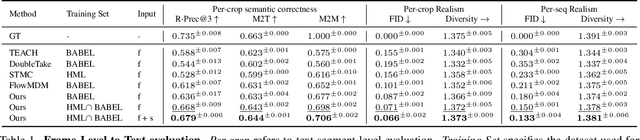
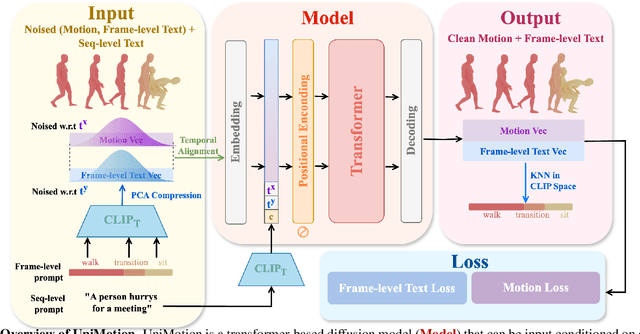
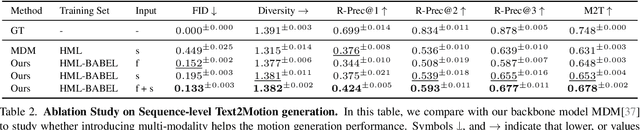
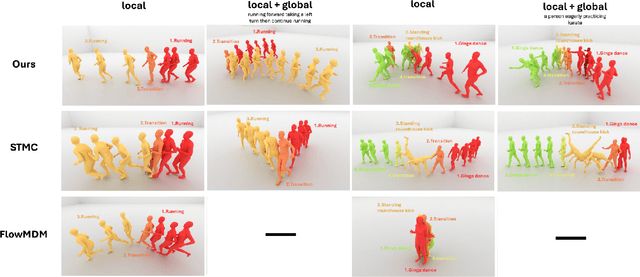
We introduce Unimotion, the first unified multi-task human motion model capable of both flexible motion control and frame-level motion understanding. While existing works control avatar motion with global text conditioning, or with fine-grained per frame scripts, none can do both at once. In addition, none of the existing works can output frame-level text paired with the generated poses. In contrast, Unimotion allows to control motion with global text, or local frame-level text, or both at once, providing more flexible control for users. Importantly, Unimotion is the first model which by design outputs local text paired with the generated poses, allowing users to know what motion happens and when, which is necessary for a wide range of applications. We show Unimotion opens up new applications: 1.) Hierarchical control, allowing users to specify motion at different levels of detail, 2.) Obtaining motion text descriptions for existing MoCap data or YouTube videos 3.) Allowing for editability, generating motion from text, and editing the motion via text edits. Moreover, Unimotion attains state-of-the-art results for the frame-level text-to-motion task on the established HumanML3D dataset. The pre-trained model and code are available available on our project page at https://coral79.github.io/Unimotion/.
GEARS: Local Geometry-aware Hand-object Interaction Synthesis
Apr 04, 2024Generating realistic hand motion sequences in interaction with objects has gained increasing attention with the growing interest in digital humans. Prior work has illustrated the effectiveness of employing occupancy-based or distance-based virtual sensors to extract hand-object interaction features. Nonetheless, these methods show limited generalizability across object categories, shapes and sizes. We hypothesize that this is due to two reasons: 1) the limited expressiveness of employed virtual sensors, and 2) scarcity of available training data. To tackle this challenge, we introduce a novel joint-centered sensor designed to reason about local object geometry near potential interaction regions. The sensor queries for object surface points in the neighbourhood of each hand joint. As an important step towards mitigating the learning complexity, we transform the points from global frame to hand template frame and use a shared module to process sensor features of each individual joint. This is followed by a spatio-temporal transformer network aimed at capturing correlation among the joints in different dimensions. Moreover, we devise simple heuristic rules to augment the limited training sequences with vast static hand grasping samples. This leads to a broader spectrum of grasping types observed during training, in turn enhancing our model's generalization capability. We evaluate on two public datasets, GRAB and InterCap, where our method shows superiority over baselines both quantitatively and perceptually.