 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn Approximate Computation of Critical Points
Jan 29, 2026We show that computing even very coarse approximations of critical points is intractable for simple classes of nonconvex functions. More concretely, we prove that if there exists a polynomial-time algorithm that takes as input a polynomial in $n$ variables of constant degree (as low as three) and outputs a point whose gradient has Euclidean norm at most $2^n$ whenever the polynomial has a critical point, then P=NP. The algorithm is permitted to return an arbitrary point when no critical point exists. We also prove hardness results for approximate computation of critical points under additional structural assumptions, including settings in which existence and uniqueness of a critical point are guaranteed, the function is lower bounded, and approximation is measured in terms of distance to a critical point. Overall, our results stand in contrast to the commonly-held belief that, in nonconvex optimization, approximate computation of critical points is a tractable task.
Learning to Warm-Start Fixed-Point Optimization Algorithms
Sep 14, 2023



We introduce a machine-learning framework to warm-start fixed-point optimization algorithms. Our architecture consists of a neural network mapping problem parameters to warm starts, followed by a predefined number of fixed-point iterations. We propose two loss functions designed to either minimize the fixed-point residual or the distance to a ground truth solution. In this way, the neural network predicts warm starts with the end-to-end goal of minimizing the downstream loss. An important feature of our architecture is its flexibility, in that it can predict a warm start for fixed-point algorithms run for any number of steps, without being limited to the number of steps it has been trained on. We provide PAC-Bayes generalization bounds on unseen data for common classes of fixed-point operators: contractive, linearly convergent, and averaged. Applying this framework to well-known applications in control, statistics, and signal processing, we observe a significant reduction in the number of iterations and solution time required to solve these problems, through learned warm starts.
Sums of Separable and Quadratic Polynomials
May 11, 2021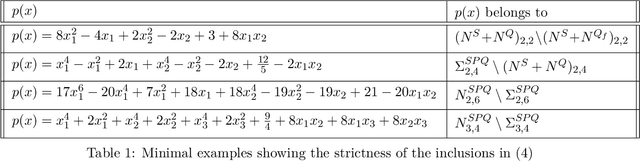

We study separable plus quadratic (SPQ) polynomials, i.e., polynomials that are the sum of univariate polynomials in different variables and a quadratic polynomial. Motivated by the fact that nonnegative separable and nonnegative quadratic polynomials are sums of squares, we study whether nonnegative SPQ polynomials are (i) the sum of a nonnegative separable and a nonnegative quadratic polynomial, and (ii) a sum of squares. We establish that the answer to question (i) is positive for univariate plus quadratic polynomials and for convex SPQ polynomials, but negative already for bivariate quartic SPQ polynomials. We use our decomposition result for convex SPQ polynomials to show that convex SPQ polynomial optimization problems can be solved by "small" semidefinite programs. For question (ii), we provide a complete characterization of the answer based on the degree and the number of variables of the SPQ polynomial. We also prove that testing nonnegativity of SPQ polynomials is NP-hard when the degree is at least four. We end by presenting applications of SPQ polynomials to upper bounding sparsity of solutions to linear programs, polynomial regression problems in statistics, and a generalization of Newton's method which incorporates separable higher-order derivative information.
Partial Recovery in the Graph Alignment Problem
Jul 01, 2020In this paper, we consider the graph alignment problem, which is the problem of recovering, given two graphs, a one-to-one mapping between nodes that maximizes edge overlap. This problem can be viewed as a noisy version of the well-known graph isomorphism problem and appears in many applications, including social network deanonymization and cellular biology. Our focus here is on partial recovery, i.e., we look for a one-to-one mapping which is correct on a fraction of the nodes of the graph rather than on all of them, and we assume that the two input graphs to the problem are correlated Erd\"os-R\'enyi graphs of parameters $(n,q,s)$. Our main contribution is then to give necessary and sufficient conditions on $(n,q,s)$ under which partial recovery is possible with high probability as the number of nodes $n$ goes to infinity. These conditions are compact, easily interpretable, and cover a vast majority of the parameter space.
A Survey of Recent Scalability Improvements for Semidefinite Programming with Applications in Machine Learning, Control, and Robotics
Aug 14, 2019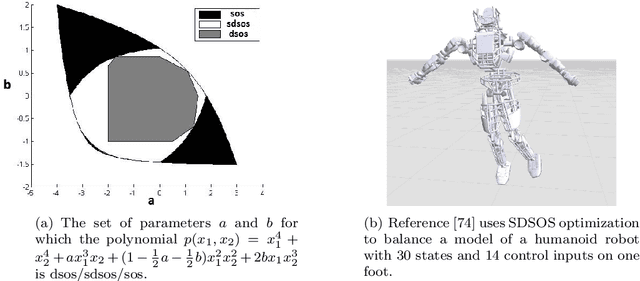
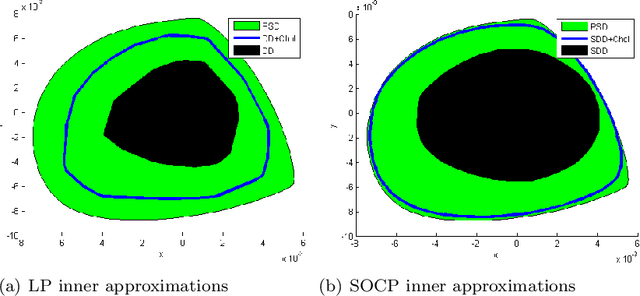
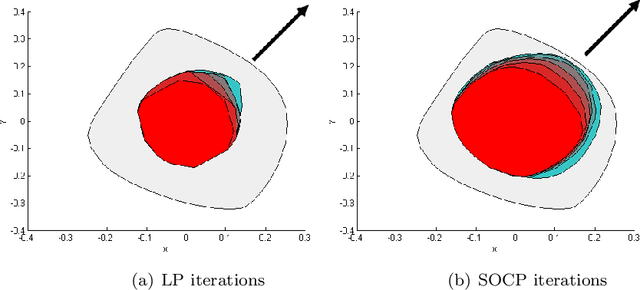
Historically, scalability has been a major challenge to the successful application of semidefinite programming in fields such as machine learning, control, and robotics. In this paper, we survey recent approaches for addressing this challenge including (i) approaches for exploiting structure (e.g., sparsity and symmetry) in a problem, (ii) approaches that produce low-rank approximate solutions to semidefinite programs, (iii) more scalable algorithms that rely on augmented Lagrangian techniques and the alternating direction method of multipliers, and (iv) approaches that trade off scalability with conservatism (e.g., by approximating semidefinite programs with linear and second-order cone programs). For each class of approaches we provide a high-level exposition, an entry-point to the corresponding literature, and examples drawn from machine learning, control, or robotics. We also present a list of software packages that implement many of the techniques discussed in the paper. Our hope is that this paper will serve as a gateway to the rich and exciting literature on scalable semidefinite programming for both theorists and practitioners.
DC Decomposition of Nonconvex Polynomials with Algebraic Techniques
Sep 12, 2018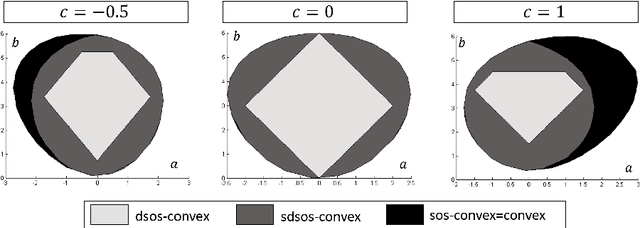


We consider the problem of decomposing a multivariate polynomial as the difference of two convex polynomials. We introduce algebraic techniques which reduce this task to linear, second order cone, and semidefinite programming. This allows us to optimize over subsets of valid difference of convex decompositions (dcds) and find ones that speed up the convex-concave procedure (CCP). We prove, however, that optimizing over the entire set of dcds is NP-hard.
On the Complexity of Detecting Convexity over a Box
Jun 16, 2018It has recently been shown that the problem of testing global convexity of polynomials of degree four is {strongly} NP-hard, answering an open question of N.Z. Shor. This result is minimal in the degree of the polynomial when global convexity is of concern. In a number of applications however, one is interested in testing convexity only over a compact region, most commonly a box (i.e., hyper-rectangle). In this paper, we show that this problem is also strongly NP-hard, in fact for polynomials of degree as low as three. This result is minimal in the degree of the polynomial and in some sense justifies why convexity detection in nonlinear optimization solvers is limited to quadratic functions or functions with special structure. As a byproduct, our proof shows that the problem of testing whether all matrices in an interval family are positive semidefinite is strongly NP-hard. This problem, which was previously shown to be (weakly) NP-hard by Nemirovski, is of independent interest in the theory of robust control.
Geometry of 3D Environments and Sum of Squares Polynomials
Mar 07, 2017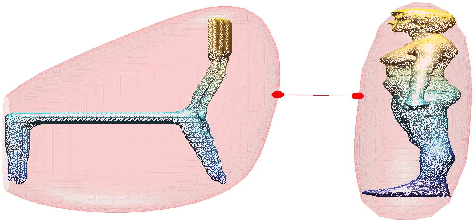


Motivated by applications in robotics and computer vision, we study problems related to spatial reasoning of a 3D environment using sublevel sets of polynomials. These include: tightly containing a cloud of points (e.g., representing an obstacle) with convex or nearly-convex basic semialgebraic sets, computation of Euclidean distances between two such sets, separation of two convex basic semalgebraic sets that overlap, and tight containment of the union of several basic semialgebraic sets with a single convex one. We use algebraic techniques from sum of squares optimization that reduce all these tasks to semidefinite programs of small size and present numerical experiments in realistic scenarios.