 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExpedition & Expansion: Leveraging Semantic Representations for Goal-Directed Exploration in Continuous Cellular Automata
Sep 04, 2025Discovering diverse visual patterns in continuous cellular automata (CA) is challenging due to the vastness and redundancy of high-dimensional behavioral spaces. Traditional exploration methods like Novelty Search (NS) expand locally by mutating known novel solutions but often plateau when local novelty is exhausted, failing to reach distant, unexplored regions. We introduce Expedition and Expansion (E&E), a hybrid strategy where exploration alternates between local novelty-driven expansions and goal-directed expeditions. During expeditions, E&E leverages a Vision-Language Model (VLM) to generate linguistic goals--descriptions of interesting but hypothetical patterns that drive exploration toward uncharted regions. By operating in semantic spaces that align with human perception, E&E both evaluates novelty and generates goals in conceptually meaningful ways, enhancing the interpretability and relevance of discovered behaviors. Tested on Flow Lenia, a continuous CA known for its rich, emergent behaviors, E&E consistently uncovers more diverse solutions than existing exploration methods. A genealogical analysis further reveals that solutions originating from expeditions disproportionately influence long-term exploration, unlocking new behavioral niches that serve as stepping stones for subsequent search. These findings highlight E&E's capacity to break through local novelty boundaries and explore behavioral landscapes in human-aligned, interpretable ways, offering a promising template for open-ended exploration in artificial life and beyond.
Flow-Lenia: Emergent evolutionary dynamics in mass conservative continuous cellular automata
Jun 10, 2025Central to the artificial life endeavour is the creation of artificial systems spontaneously generating properties found in the living world such as autopoiesis, self-replication, evolution and open-endedness. While numerous models and paradigms have been proposed, cellular automata (CA) have taken a very important place in the field notably as they enable the study of phenomenons like self-reproduction and autopoiesis. Continuous CA like Lenia have been showed to produce life-like patterns reminiscent, on an aesthetic and ontological point of view, of biological organisms we call creatures. We propose in this paper Flow-Lenia, a mass conservative extension of Lenia. We present experiments demonstrating its effectiveness in generating spatially-localized patters (SLPs) with complex behaviors and show that the update rule parameters can be optimized to generate complex creatures showing behaviors of interest. Furthermore, we show that Flow-Lenia allows us to embed the parameters of the model, defining the properties of the emerging patterns, within its own dynamics thus allowing for multispecies simulations. By using the evolutionary activity framework as well as other metrics, we shed light on the emergent evolutionary dynamics taking place in this system.
* This manuscript has been accepted for publication in the Artificial Life journal (https://direct.mit.edu/artl)
Exploring Flow-Lenia Universes with a Curiosity-driven AI Scientist: Discovering Diverse Ecosystem Dynamics
May 21, 2025We present a method for the automated discovery of system-level dynamics in Flow-Lenia$-$a continuous cellular automaton (CA) with mass conservation and parameter localization$-$using a curiosity-driven AI scientist. This method aims to uncover processes leading to self-organization of evolutionary and ecosystemic dynamics in CAs. We build on previous work which uses diversity search algorithms in Lenia to find self-organized individual patterns, and extend it to large environments that support distinct interacting patterns. We adapt Intrinsically Motivated Goal Exploration Processes (IMGEPs) to drive exploration of diverse Flow-Lenia environments using simulation-wide metrics, such as evolutionary activity, compression-based complexity, and multi-scale entropy. We test our method in two experiments, showcasing its ability to illuminate significantly more diverse dynamics compared to random search. We show qualitative results illustrating how ecosystemic simulations enable self-organization of complex collective behaviors not captured by previous individual pattern search and analysis. We complement automated discovery with an interactive exploration tool, creating an effective human-AI collaborative workflow for scientific investigation. Though demonstrated specifically with Flow-Lenia, this methodology provides a framework potentially applicable to other parameterizable complex systems where understanding emergent collective properties is of interest.
Emergent kin selection of altruistic feeding via non-episodic neuroevolution
Nov 15, 2024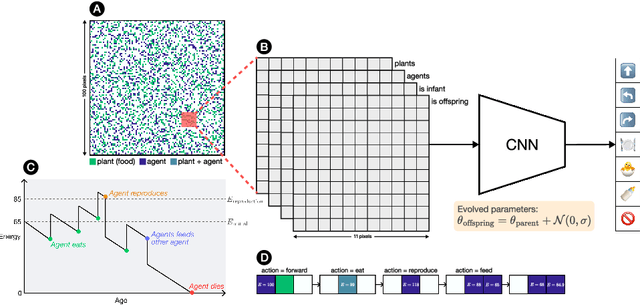
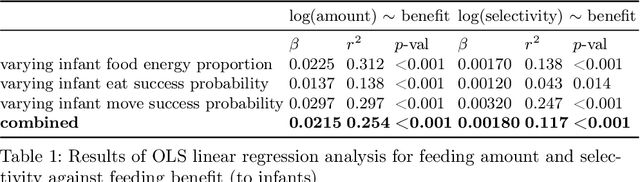

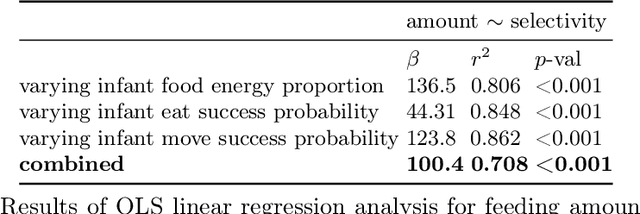
Kin selection theory has proven to be a popular and widely accepted account of how altruistic behaviour can evolve under natural selection. Hamilton's rule, first published in 1964, has since been experimentally validated across a range of different species and social behaviours. In contrast to this large body of work in natural populations, however, there has been relatively little study of kin selection \emph{in silico}. In the current work, we offer what is to our knowledge the first demonstration of kin selection emerging naturally within a population of agents undergoing continuous neuroevolution. Specifically, we find that zero-sum transfer of resources from parents to their infant offspring evolves through kin selection in environments where it is hard for offspring to survive alone. In an additional experiment, we show that kin selection in our simulations relies on a combination of kin recognition and population viscosity. We believe that our work may contribute to the understanding of kin selection in minimal evolutionary systems, without explicit notions of genes and fitness maximisation.
Discovering Sensorimotor Agency in Cellular Automata using Diversity Search
Feb 14, 2024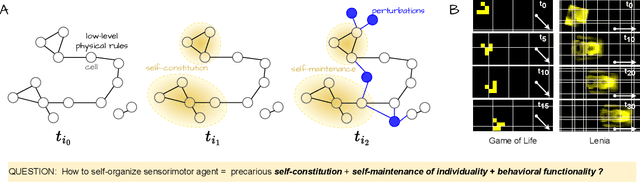
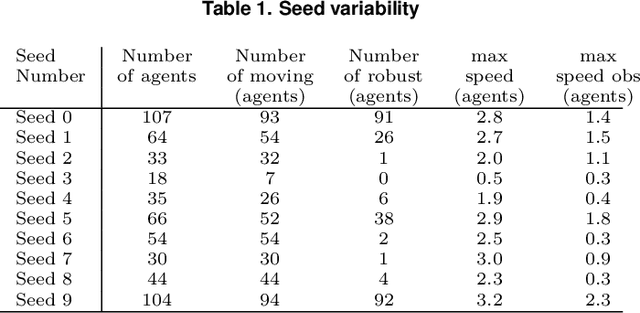
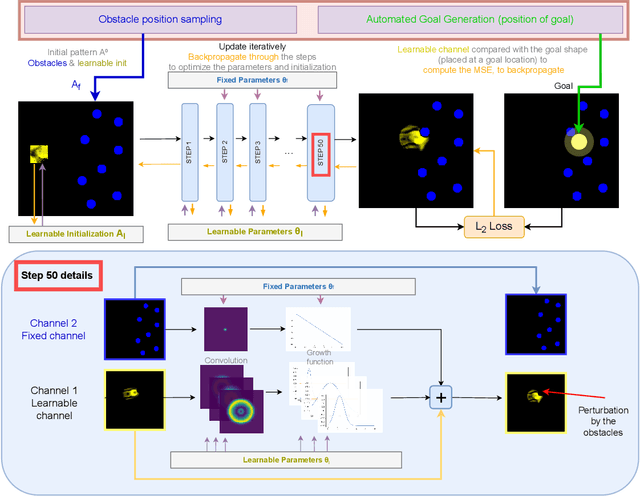
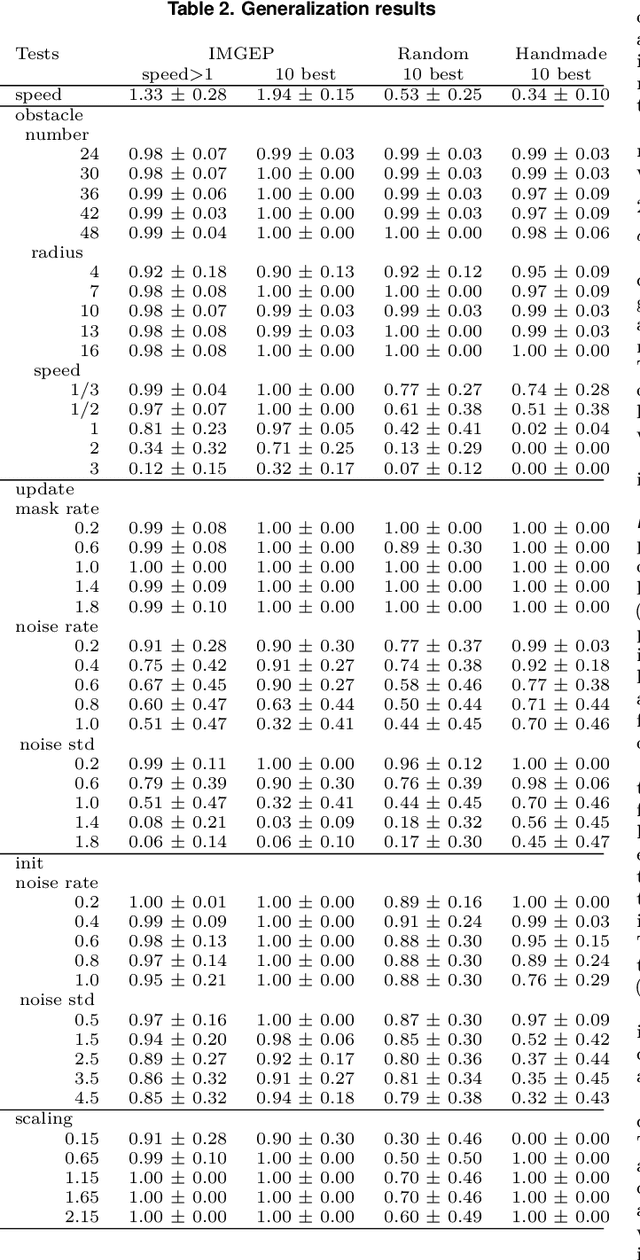
The research field of Artificial Life studies how life-like phenomena such as autopoiesis, agency, or self-regulation can self-organize in computer simulations. In cellular automata (CA), a key open-question has been whether it it is possible to find environment rules that self-organize robust "individuals" from an initial state with no prior existence of things like "bodies", "brain", "perception" or "action". In this paper, we leverage recent advances in machine learning, combining algorithms for diversity search, curriculum learning and gradient descent, to automate the search of such "individuals", i.e. localized structures that move around with the ability to react in a coherent manner to external obstacles and maintain their integrity, hence primitive forms of sensorimotor agency. We show that this approach enables to find systematically environmental conditions in CA leading to self-organization of such basic forms of agency. Through multiple experiments, we show that the discovered agents have surprisingly robust capabilities to move, maintain their body integrity and navigate among various obstacles. They also show strong generalization abilities, with robustness to changes of scale, random updates or perturbations from the environment not seen during training. We discuss how this approach opens new perspectives in AI and synthetic bioengineering.
Evolving Reservoirs for Meta Reinforcement Learning
Dec 09, 2023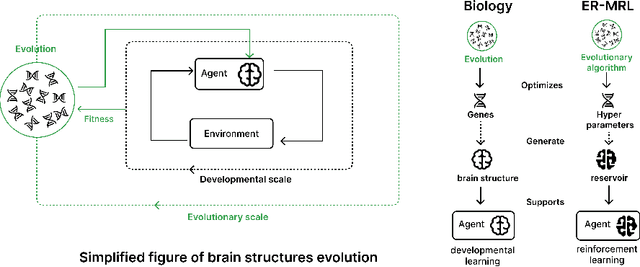
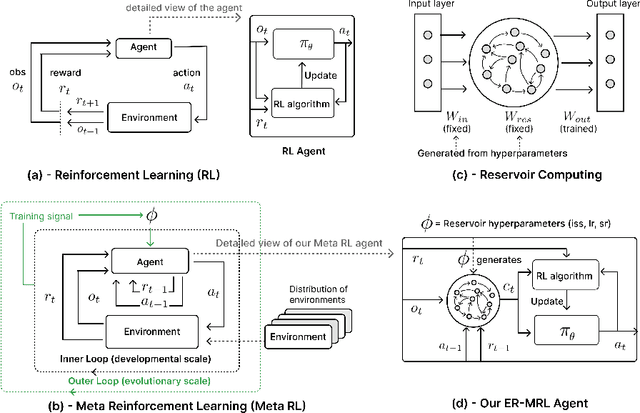
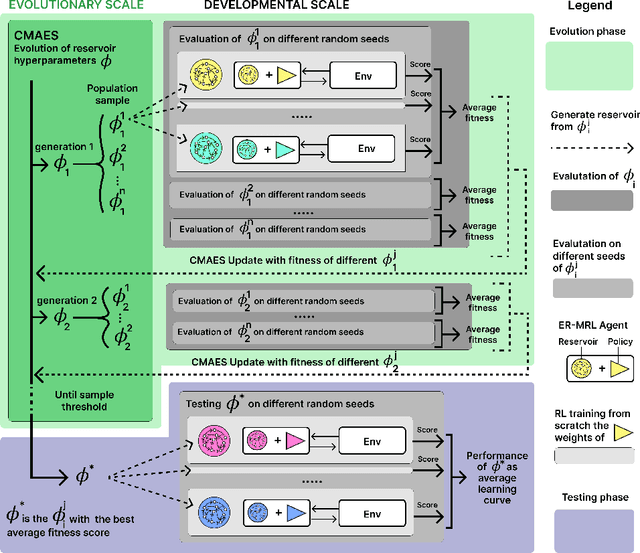
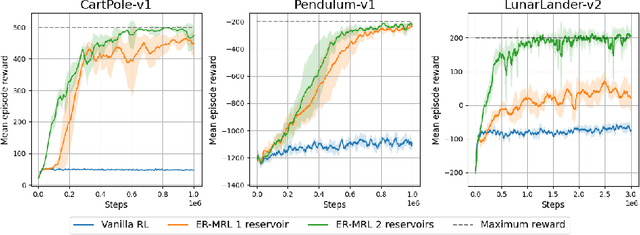
Animals often demonstrate a remarkable ability to adapt to their environments during their lifetime. They do so partly due to the evolution of morphological and neural structures. These structures capture features of environments shared between generations to bias and speed up lifetime learning. In this work, we propose a computational model for studying a mechanism that can enable such a process. We adopt a computational framework based on meta reinforcement learning as a model of the interplay between evolution and development. At the evolutionary scale, we evolve reservoirs, a family of recurrent neural networks that differ from conventional networks in that one optimizes not the weight values but hyperparameters of the architecture: the later control macro-level properties, such as memory and dynamics. At the developmental scale, we employ these evolved reservoirs to facilitate the learning of a behavioral policy through Reinforcement Learning (RL). Within an RL agent, a reservoir encodes the environment state before providing it to an action policy. We evaluate our approach on several 2D and 3D simulated environments. Our results show that the evolution of reservoirs can improve the learning of diverse challenging tasks. We study in particular three hypotheses: the use of an architecture combining reservoirs and reinforcement learning could enable (1) solving tasks with partial observability, (2) generating oscillatory dynamics that facilitate the learning of locomotion tasks, and (3) facilitating the generalization of learned behaviors to new tasks unknown during the evolution phase.
Emergence of Collective Open-Ended Exploration from Decentralized Meta-Reinforcement Learning
Nov 02, 2023Recent works have proven that intricate cooperative behaviors can emerge in agents trained using meta reinforcement learning on open ended task distributions using self-play. While the results are impressive, we argue that self-play and other centralized training techniques do not accurately reflect how general collective exploration strategies emerge in the natural world: through decentralized training and over an open-ended distribution of tasks. In this work we therefore investigate the emergence of collective exploration strategies, where several agents meta-learn independent recurrent policies on an open ended distribution of tasks. To this end we introduce a novel environment with an open ended procedurally generated task space which dynamically combines multiple subtasks sampled from five diverse task types to form a vast distribution of task trees. We show that decentralized agents trained in our environment exhibit strong generalization abilities when confronted with novel objects at test time. Additionally, despite never being forced to cooperate during training the agents learn collective exploration strategies which allow them to solve novel tasks never encountered during training. We further find that the agents learned collective exploration strategies extend to an open ended task setting, allowing them to solve task trees of twice the depth compared to the ones seen during training. Our open source code as well as videos of the agents can be found on our companion website.
Flow Lenia: Mass conservation for the study of virtual creatures in continuous cellular automata
Dec 14, 2022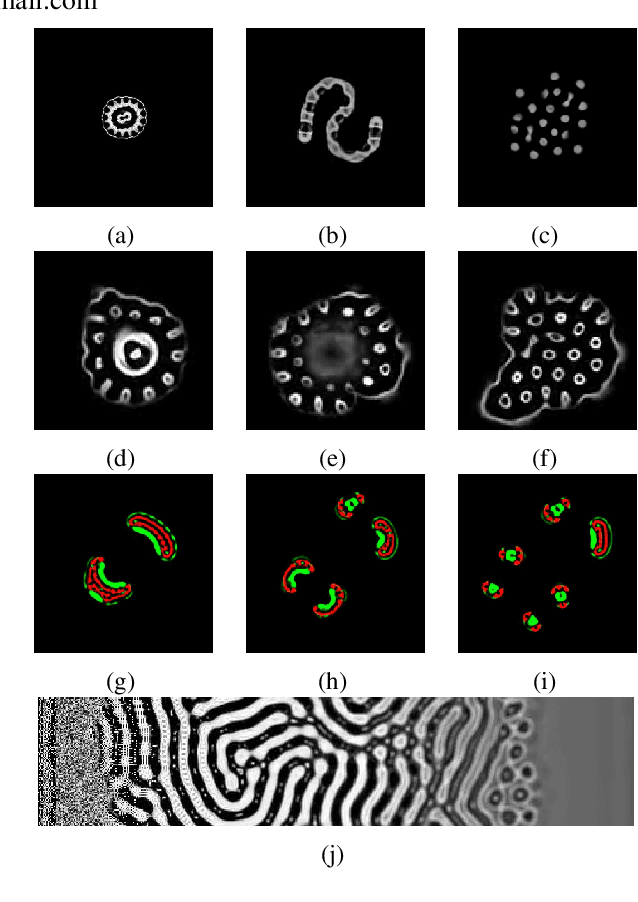
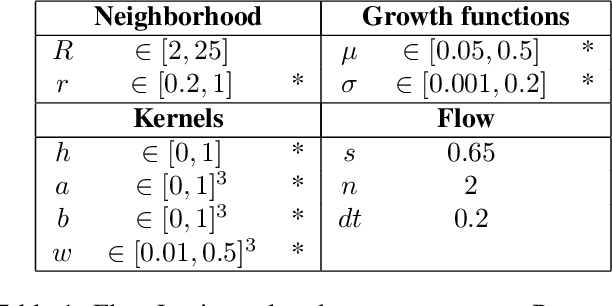
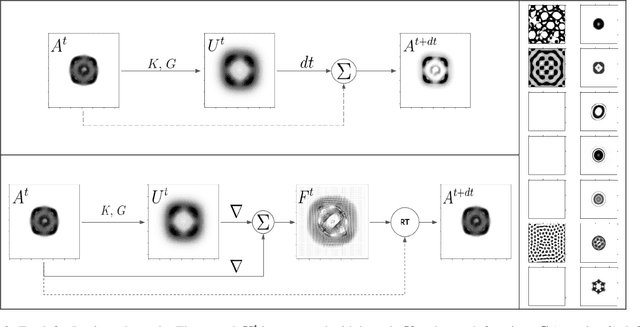
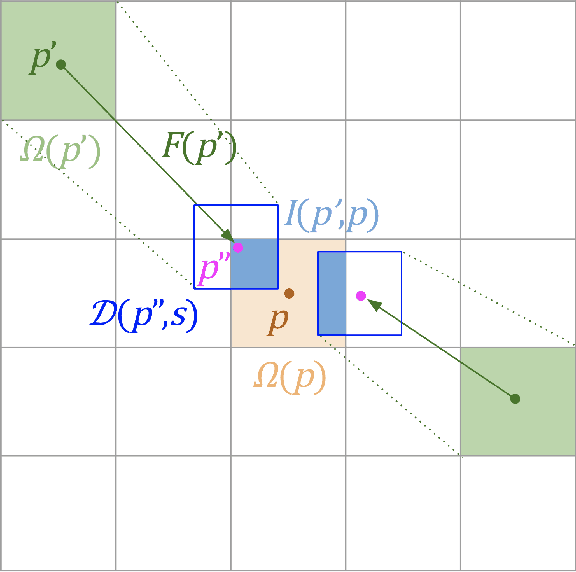
Lenia is a family of cellular automata (CA) generalizing Conway's Game of Life to continuous space, time and states. Lenia has attracted a lot of attention because of the wide diversity of self-organizing patterns it can generate. Among those, some spatially localized patterns (SLPs) resemble life-like artificial creatures. However, those creatures are found in only a small subspace of the Lenia parameter space and are not trivial to discover, necessitating advanced search algorithms. We hypothesize that adding a mass conservation constraint could facilitate the emergence of SLPs. We propose here an extension of the Lenia model, called Flow Lenia, which enables mass conservation. We show a few observations demonstrating its effectiveness in generating SLPs with complex behaviors. Furthermore, we show how Flow Lenia enables the integration of the parameters of the CA update rules within the CA dynamics, making them dynamic and localized. This allows for multi-species simulations, with locally coherent update rules that define properties of the emerging creatures, and that can be mixed with neighbouring rules. We argue that this paves the way for the intrinsic evolution of self-organized artificial life forms within continuous CAs.