 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlow-Lenia: Emergent evolutionary dynamics in mass conservative continuous cellular automata
Jun 10, 2025Central to the artificial life endeavour is the creation of artificial systems spontaneously generating properties found in the living world such as autopoiesis, self-replication, evolution and open-endedness. While numerous models and paradigms have been proposed, cellular automata (CA) have taken a very important place in the field notably as they enable the study of phenomenons like self-reproduction and autopoiesis. Continuous CA like Lenia have been showed to produce life-like patterns reminiscent, on an aesthetic and ontological point of view, of biological organisms we call creatures. We propose in this paper Flow-Lenia, a mass conservative extension of Lenia. We present experiments demonstrating its effectiveness in generating spatially-localized patters (SLPs) with complex behaviors and show that the update rule parameters can be optimized to generate complex creatures showing behaviors of interest. Furthermore, we show that Flow-Lenia allows us to embed the parameters of the model, defining the properties of the emerging patterns, within its own dynamics thus allowing for multispecies simulations. By using the evolutionary activity framework as well as other metrics, we shed light on the emergent evolutionary dynamics taking place in this system.
* This manuscript has been accepted for publication in the Artificial Life journal (https://direct.mit.edu/artl)
Discovering Sensorimotor Agency in Cellular Automata using Diversity Search
Feb 14, 2024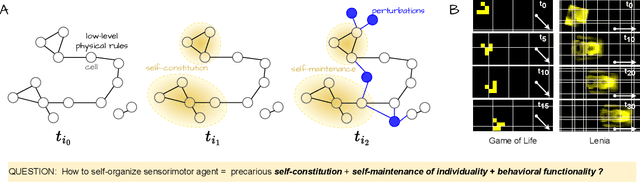
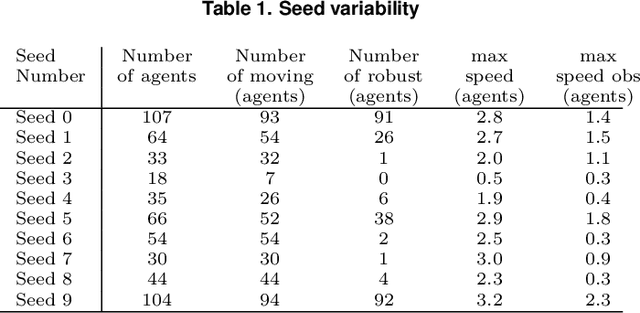
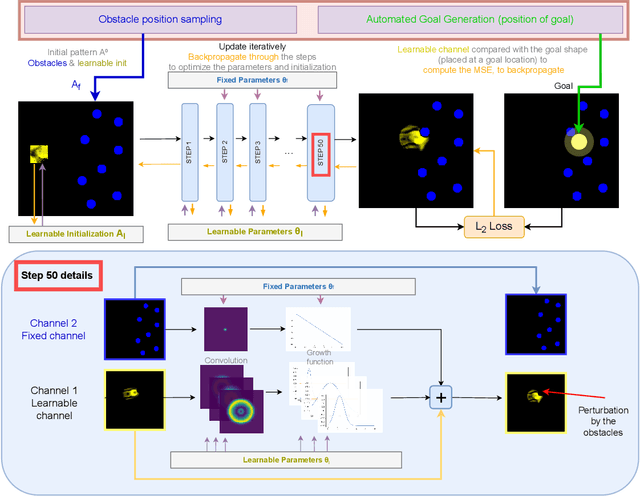
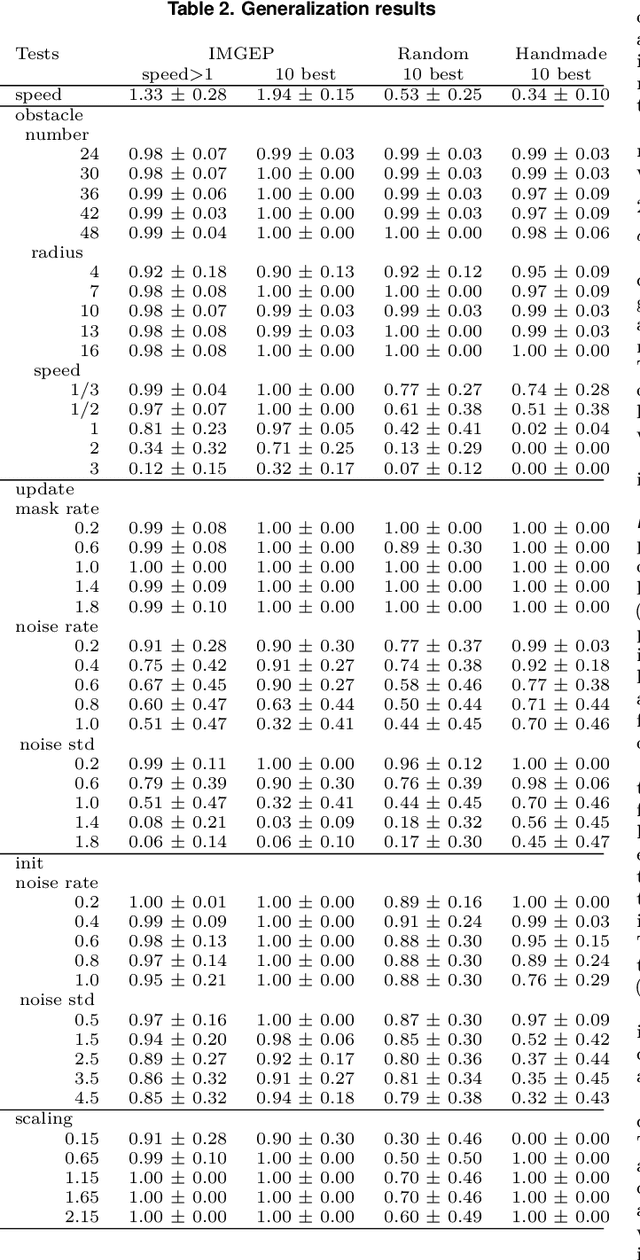
The research field of Artificial Life studies how life-like phenomena such as autopoiesis, agency, or self-regulation can self-organize in computer simulations. In cellular automata (CA), a key open-question has been whether it it is possible to find environment rules that self-organize robust "individuals" from an initial state with no prior existence of things like "bodies", "brain", "perception" or "action". In this paper, we leverage recent advances in machine learning, combining algorithms for diversity search, curriculum learning and gradient descent, to automate the search of such "individuals", i.e. localized structures that move around with the ability to react in a coherent manner to external obstacles and maintain their integrity, hence primitive forms of sensorimotor agency. We show that this approach enables to find systematically environmental conditions in CA leading to self-organization of such basic forms of agency. Through multiple experiments, we show that the discovered agents have surprisingly robust capabilities to move, maintain their body integrity and navigate among various obstacles. They also show strong generalization abilities, with robustness to changes of scale, random updates or perturbations from the environment not seen during training. We discuss how this approach opens new perspectives in AI and synthetic bioengineering.
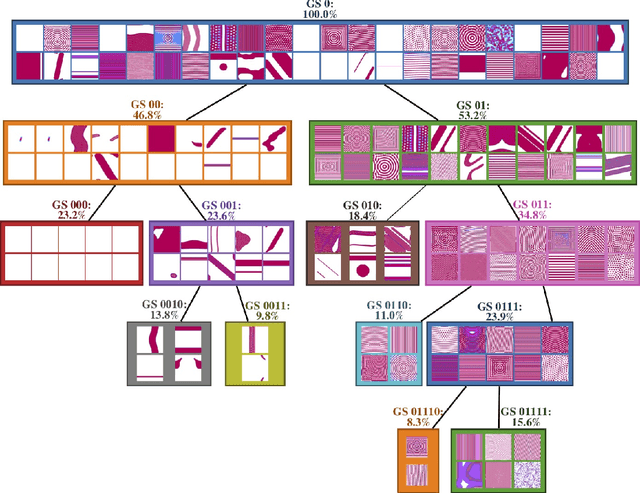
Meta-Diversity Search in Complex Systems, A Recipe for Artificial Open-Endedness ?
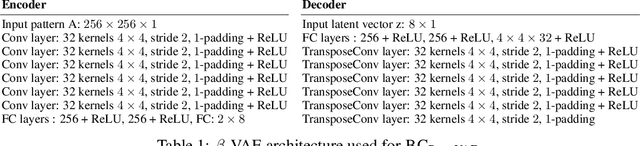
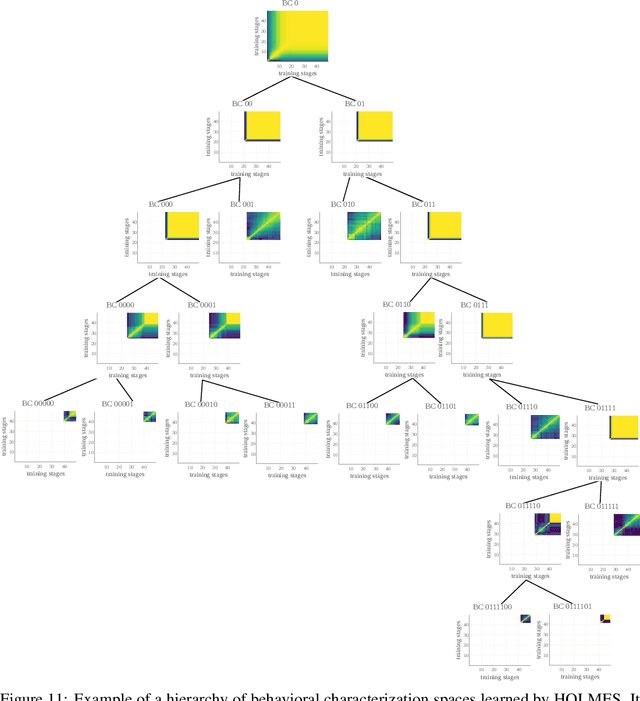
Dec 01, 2023Can we build an artificial system that would be able to generate endless surprises if ran "forever" in Minecraft? While there is not a single path toward solving that grand challenge, this article presents what we believe to be some working ingredients for the endless generation of novel increasingly complex artifacts in Minecraft. Our framework for an open-ended system includes two components: a complex system used to recursively grow and complexify artifacts over time, and a discovery algorithm that leverages the concept of meta-diversity search. Since complex systems have shown to enable the emergence of considerable complexity from set of simple rules, we believe them to be great candidates to generate all sort of artifacts in Minecraft. Yet, the space of possible artifacts that can be generated by these systems is often unknown, challenging to characterize and explore. Therefore automating the long-term discovery of novel and increasingly complex artifacts in these systems is an exciting research field. To approach these challenges, we formulate the problem of meta-diversity search where an artificial "discovery assistant" incrementally learns a diverse set of representations to characterize behaviors and searches to discover diverse patterns within each of them. A successful discovery assistant should continuously seek for novel sources of diversities while being able to quickly specialize the search toward a new unknown type of diversity. To implement those ideas in the Minecraft environment, we simulate an artificial "chemistry" system based on Lenia continuous cellular automaton for generating artifacts, as well as an artificial "discovery assistant" (called Holmes) for the artifact-discovery process. Holmes incrementally learns a hierarchy of modular representations to characterize divergent sources of diversity and uses a goal-based intrinsically-motivated exploration as the diversity search strategy.
SBMLtoODEjax: efficient simulation and optimization of ODE SBML models in JAX
Jul 17, 2023


Developing methods to explore, predict and control the dynamic behavior of biological systems, from protein pathways to complex cellular processes, is an essential frontier of research for bioengineering and biomedicine. Thus, significant effort has gone in computational inference and mathematical modeling of biological systems. This effort has resulted in the development of large collections of publicly-available models, typically stored and exchanged on online platforms (such as the BioModels Database) using the Systems Biology Markup Language (SBML), a standard format for representing mathematical models of biological systems. SBMLtoODEjax is a lightweight library that allows to automatically parse and convert SBML models into python models written end-to-end in JAX, a high-performance numerical computing library with automatic differentiation capabilities. SBMLtoODEjax is targeted at researchers that aim to incorporate SBML-specified ordinary differential equation (ODE) models into their python projects and machine learning pipelines, in order to perform efficient numerical simulation and optimization with only a few lines of code. SBMLtoODEjax is available at https://github.com/flowersteam/sbmltoodejax.
Flow Lenia: Mass conservation for the study of virtual creatures in continuous cellular automata
Dec 14, 2022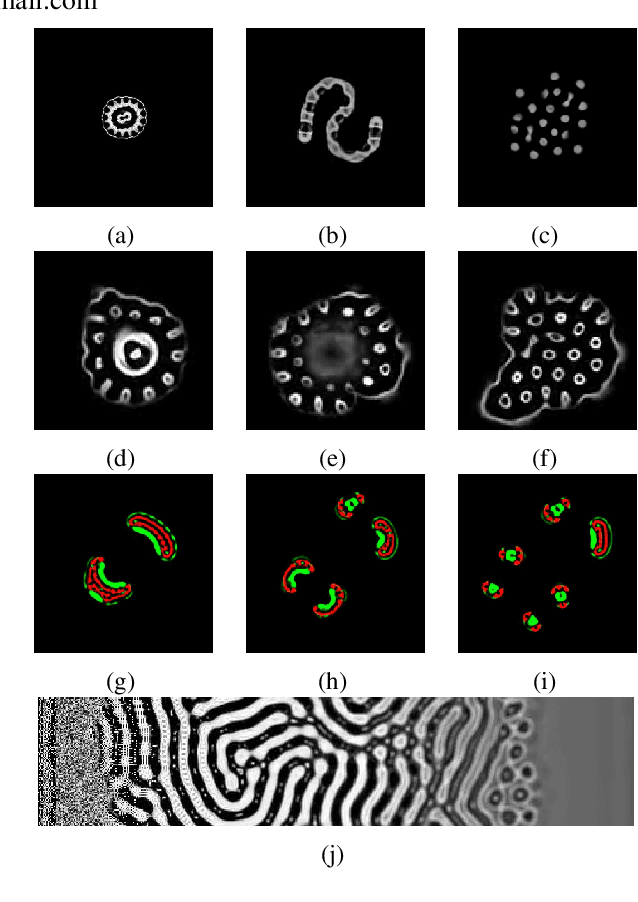
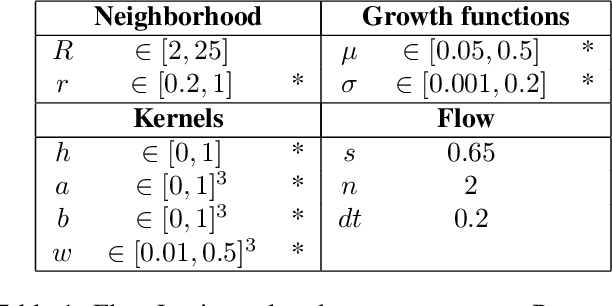
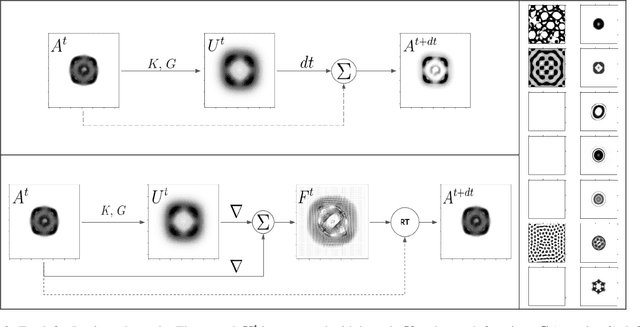
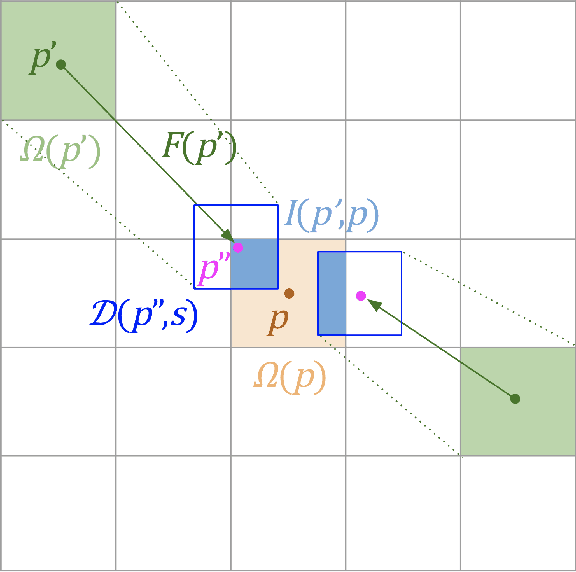
Lenia is a family of cellular automata (CA) generalizing Conway's Game of Life to continuous space, time and states. Lenia has attracted a lot of attention because of the wide diversity of self-organizing patterns it can generate. Among those, some spatially localized patterns (SLPs) resemble life-like artificial creatures. However, those creatures are found in only a small subspace of the Lenia parameter space and are not trivial to discover, necessitating advanced search algorithms. We hypothesize that adding a mass conservation constraint could facilitate the emergence of SLPs. We propose here an extension of the Lenia model, called Flow Lenia, which enables mass conservation. We show a few observations demonstrating its effectiveness in generating SLPs with complex behaviors. Furthermore, we show how Flow Lenia enables the integration of the parameters of the CA update rules within the CA dynamics, making them dynamic and localized. This allows for multi-species simulations, with locally coherent update rules that define properties of the emerging creatures, and that can be mixed with neighbouring rules. We argue that this paves the way for the intrinsic evolution of self-organized artificial life forms within continuous CAs.
Hierarchically-Organized Latent Modules for Exploratory Search in Morphogenetic Systems
Jul 02, 2020
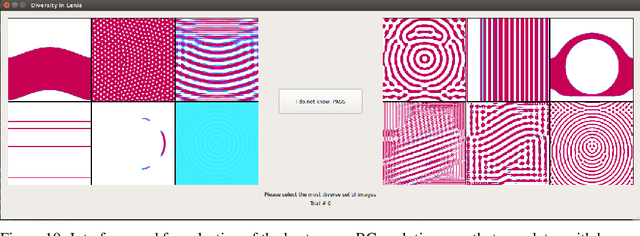
Self-organization of complex morphological patterns from local interactions is a fascinating phenomenon in many natural and artificial systems. In the artificial world, typical examples of such morphogenetic systems are cellular automata. Yet, their mechanisms are often very hard to grasp and so far scientific discoveries of novel patterns have primarily been relying on manual tuning and ad hoc exploratory search. The problem of automated diversity-driven discovery in these systems was recently introduced [26, 61], highlighting that two key ingredients are autonomous exploration and unsupervised representation learning to describe "relevant" degrees of variations in the patterns. In this paper, we motivate the need for what we call Meta-diversity search, arguing that there is not a unique ground truth interesting diversity as it strongly depends on the final observer and its motives. Using a continuous game-of-life system for experiments, we provide empirical evidences that relying on monolithic architectures for the behavioral embedding design tends to bias the final discoveries (both for hand-defined and unsupervisedly-learned features) which are unlikely to be aligned with the interest of a final end-user. To address these issues, we introduce a novel dynamic and modular architecture that enables unsupervised learning of a hierarchy of diverse representations. Combined with intrinsically motivated goal exploration algorithms, we show that this system forms a discovery assistant that can efficiently adapt its diversity search towards preferences of a user using only a very small amount of user feedback.
Progressive growing of self-organized hierarchical representations for exploration
May 13, 2020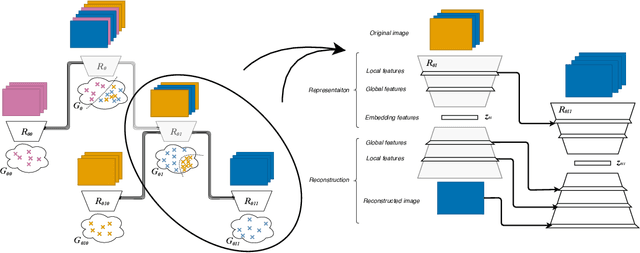


Designing agent that can autonomously discover and learn a diversity of structures and skills in unknown changing environments is key for lifelong machine learning. A central challenge is how to learn incrementally representations in order to progressively build a map of the discovered structures and re-use it to further explore. To address this challenge, we identify and target several key functionalities. First, we aim to build lasting representations and avoid catastrophic forgetting throughout the exploration process. Secondly we aim to learn a diversity of representations allowing to discover a "diversity of diversity" of structures (and associated skills) in complex high-dimensional environments. Thirdly, we target representations that can structure the agent discoveries in a coarse-to-fine manner. Finally, we target the reuse of such representations to drive exploration toward an "interesting" type of diversity, for instance leveraging human guidance. Current approaches in state representation learning rely generally on monolithic architectures which do not enable all these functionalities. Therefore, we present a novel technique to progressively construct a Hierarchy of Observation Latent Models for Exploration Stratification, called HOLMES. This technique couples the use of a dynamic modular model architecture for representation learning with intrinsically-motivated goal exploration processes (IMGEPs). The paper shows results in the domain of automated discovery of diverse self-organized patterns, considering as testbed the experimental framework from Reinke et al. (2019).
Intrinsically Motivated Discovery of Diverse Patterns in Self-Organizing Systems
Sep 30, 2019In many complex dynamical systems, artificial or natural, one can observe self-organization of patterns emerging from local rules. Cellular automata, like the Game of Life (GOL), have been widely used as abstract models enabling the study of various aspects of self-organization and morphogenesis, such as the emergence of spatially localized patterns. However, findings of self-organized patterns in such models have so far relied on manual tuning of parameters and initial states, and on the human eye to identify interesting patterns. In this paper, we formulate the problem of automated discovery of diverse self-organized patterns in such high-dimensional complex dynamical systems, as well as a framework for experimentation and evaluation. Using a continuous GOL as a testbed, we show that recent intrinsically-motivated machine learning algorithms (POP-IMGEPs), initially developed for learning of inverse models in robotics, can be transposed and used in this novel application area. These algorithms combine intrinsically-motivated goal exploration and unsupervised learning of goal space representations. Goal space representations describe the interesting features of patterns for which diverse variations should be discovered. In particular, we compare various approaches to define and learn goal space representations from the perspective of discovering diverse spatially localized patterns. Moreover, we introduce an extension of a state-of-the-art POP-IMGEP algorithm which incrementally learns a goal representation using a deep auto-encoder, and the use of CPPN primitives for generating initialization parameters. We show that it is more efficient than several baselines and equally efficient as a system pre-trained on a hand-made database of patterns identified by human experts.