 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQDGset: A Large Scale Grasping Dataset Generated with Quality-Diversity
Oct 03, 2024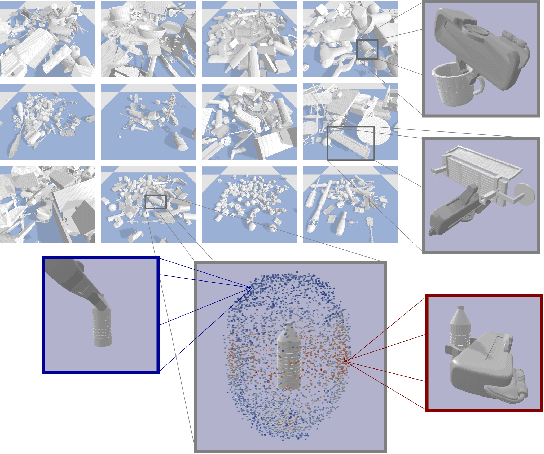
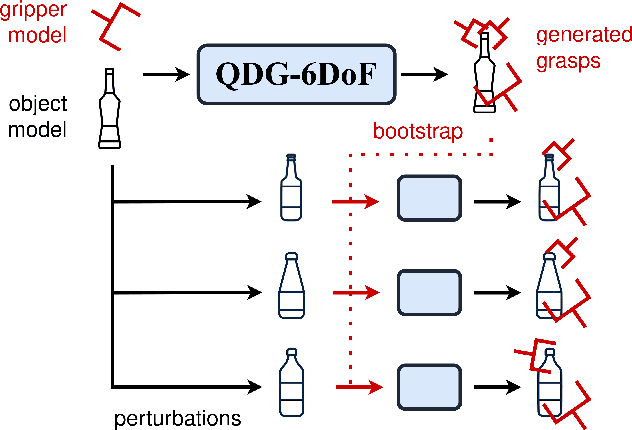
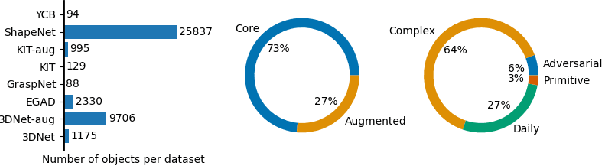
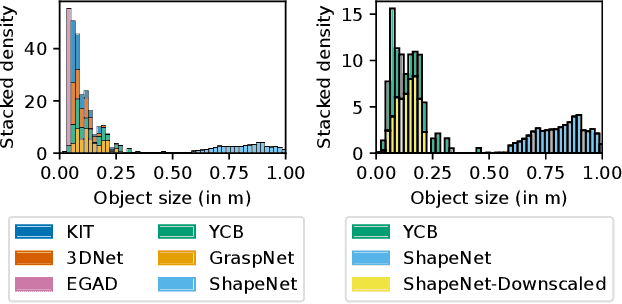
Recent advances in AI have led to significant results in robotic learning, but skills like grasping remain partially solved. Many recent works exploit synthetic grasping datasets to learn to grasp unknown objects. However, those datasets were generated using simple grasp sampling methods using priors. Recently, Quality-Diversity (QD) algorithms have been proven to make grasp sampling significantly more efficient. In this work, we extend QDG-6DoF, a QD framework for generating object-centric grasps, to scale up the production of synthetic grasping datasets. We propose a data augmentation method that combines the transformation of object meshes with transfer learning from previous grasping repertoires. The conducted experiments show that this approach reduces the number of required evaluations per discovered robust grasp by up to 20%. We used this approach to generate QDGset, a dataset of 6DoF grasp poses that contains about 3.5 and 4.5 times more grasps and objects, respectively, than the previous state-of-the-art. Our method allows anyone to easily generate data, eventually contributing to a large-scale collaborative dataset of synthetic grasps.
Speeding up 6-DoF Grasp Sampling with Quality-Diversity
Mar 10, 2024



Recent advances in AI have led to significant results in robotic learning, including natural language-conditioned planning and efficient optimization of controllers using generative models. However, the interaction data remains the bottleneck for generalization. Getting data for grasping is a critical challenge, as this skill is required to complete many manipulation tasks. Quality-Diversity (QD) algorithms optimize a set of solutions to get diverse, high-performing solutions to a given problem. This paper investigates how QD can be combined with priors to speed up the generation of diverse grasps poses in simulation compared to standard 6-DoF grasp sampling schemes. Experiments conducted on 4 grippers with 2-to-5 fingers on standard objects show that QD outperforms commonly used methods by a large margin. Further experiments show that QD optimization automatically finds some efficient priors that are usually hard coded. The deployment of generated grasps on a 2-finger gripper and an Allegro hand shows that the diversity produced maintains sim-to-real transferability. We believe these results to be a significant step toward the generation of large datasets that can lead to robust and generalizing robotic grasping policies.
Learning to Grasp: from Somewhere to Anywhere
Oct 06, 2023



Robotic grasping is still a partially solved, multidisciplinary problem where data-driven techniques play an increasing role. The sparse nature of rewards make the automatic generation of grasping datasets challenging, especially for unconventional morphologies or highly actuated end-effectors. Most approaches for obtaining large-scale datasets rely on numerous human-provided demonstrations or heavily engineered solutions that do not scale well. Recent advances in Quality-Diversity (QD) methods have investigated how to learn object grasping at a specific pose with different robot morphologies. The present work introduces a pipeline for adapting QD-generated trajectories to new object poses. Using an RGB-D data stream, the vision pipeline first detects the targeted object, predicts its 6-DOF pose, and finally tracks it. An automatically generated reach-and-grasp trajectory can then be adapted by projecting it relatively to the object frame. Hundreds of trajectories have been deployed into the real world on several objects and with different robotic setups: a Franka Research 3 with a parallel gripper and a UR5 with a dexterous SIH Schunk hand. The transfer ratio obtained when applying transformation to the object pose matches the one obtained when the object pose matches the simulation, demonstrating the efficiency of the proposed approach.
Domain Randomization for Sim2real Transfer of Automatically Generated Grasping Datasets
Oct 06, 2023



Robotic grasping refers to making a robotic system pick an object by applying forces and torques on its surface. Many recent studies use data-driven approaches to address grasping, but the sparse reward nature of this task made the learning process challenging to bootstrap. To avoid constraining the operational space, an increasing number of works propose grasping datasets to learn from. But most of them are limited to simulations. The present paper investigates how automatically generated grasps can be exploited in the real world. More than 7000 reach-and-grasp trajectories have been generated with Quality-Diversity (QD) methods on 3 different arms and grippers, including parallel fingers and a dexterous hand, and tested in the real world. Conducted analysis on the collected measure shows correlations between several Domain Randomization-based quality criteria and sim-to-real transferability. Key challenges regarding the reality gap for grasping have been identified, stressing matters on which researchers on grasping should focus in the future. A QD approach has finally been proposed for making grasps more robust to domain randomization, resulting in a transfer ratio of 84% on the Franka Research 3 arm.