 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQDTraj: Exploration of Diverse Trajectory Primitives for Articulated Objects Robotic Manipulation
Apr 24, 2026Thanks to the latest advances in learning and robotics, domestic robots are beginning to enter homes, aiming to execute household chores autonomously. However, robots still struggle to perform autonomous manipulation tasks in open-ended environments. In this context, this paper presents a method that enables a robot to manipulate a wide spectrum of articulated objects. In this paper, we automatically generate different robot low-level trajectory primitives to manipulate given object articulations. A very important point when it comes to generating expert trajectories is to consider the diversity of solutions to achieve the same goal. Indeed, knowing diverse low-level primitives to accomplish the same task enables the robot to choose the optimal solution in its real-world environment, with live constraints and unexpected changes. To do so, we propose a method based on Quality-Diversity algorithms that leverages sparse reward exploration in order to generate a set of diverse and high-performing trajectory primitives for a given manipulation task. We validated our method, QDTraj, by generating diverse trajectories in simulation and deploying them in the real world. QDTraj generates at least 5 times more diverse trajectories for both hinge and slider activation tasks, outperforming the other methods we compared against. We assessed the generalization of our method over 30 articulations of the PartNetMobility articulated object dataset, with an average of 704 different trajectories by task. Code is publicly available at: https://kappel.web.isir.upmc.fr/trajectory_primitive_website
QDGset: A Large Scale Grasping Dataset Generated with Quality-Diversity
Oct 03, 2024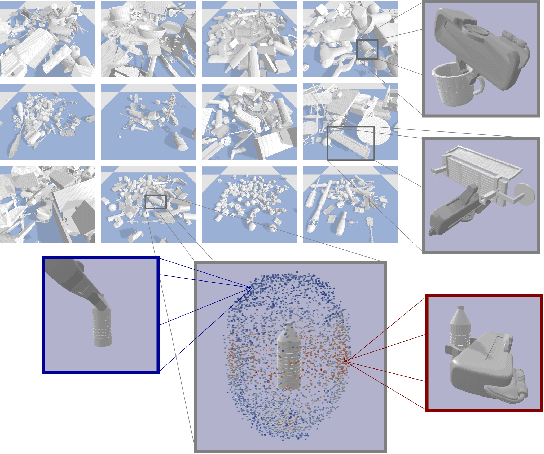
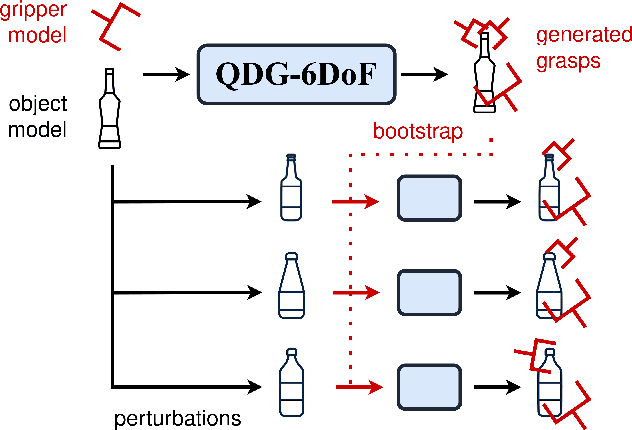
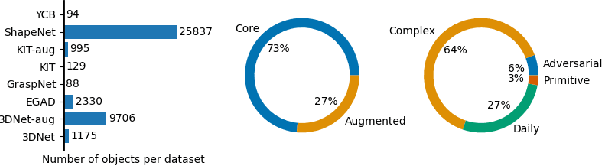
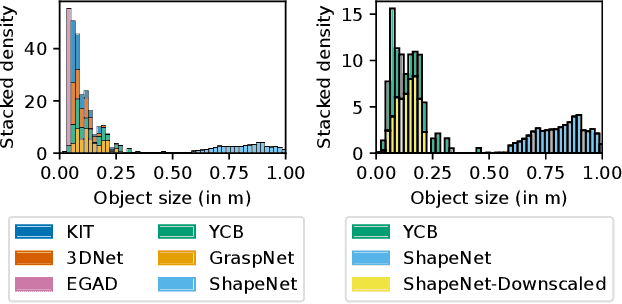
Recent advances in AI have led to significant results in robotic learning, but skills like grasping remain partially solved. Many recent works exploit synthetic grasping datasets to learn to grasp unknown objects. However, those datasets were generated using simple grasp sampling methods using priors. Recently, Quality-Diversity (QD) algorithms have been proven to make grasp sampling significantly more efficient. In this work, we extend QDG-6DoF, a QD framework for generating object-centric grasps, to scale up the production of synthetic grasping datasets. We propose a data augmentation method that combines the transformation of object meshes with transfer learning from previous grasping repertoires. The conducted experiments show that this approach reduces the number of required evaluations per discovered robust grasp by up to 20%. We used this approach to generate QDGset, a dataset of 6DoF grasp poses that contains about 3.5 and 4.5 times more grasps and objects, respectively, than the previous state-of-the-art. Our method allows anyone to easily generate data, eventually contributing to a large-scale collaborative dataset of synthetic grasps.
Speeding up 6-DoF Grasp Sampling with Quality-Diversity
Mar 10, 2024



Recent advances in AI have led to significant results in robotic learning, including natural language-conditioned planning and efficient optimization of controllers using generative models. However, the interaction data remains the bottleneck for generalization. Getting data for grasping is a critical challenge, as this skill is required to complete many manipulation tasks. Quality-Diversity (QD) algorithms optimize a set of solutions to get diverse, high-performing solutions to a given problem. This paper investigates how QD can be combined with priors to speed up the generation of diverse grasps poses in simulation compared to standard 6-DoF grasp sampling schemes. Experiments conducted on 4 grippers with 2-to-5 fingers on standard objects show that QD outperforms commonly used methods by a large margin. Further experiments show that QD optimization automatically finds some efficient priors that are usually hard coded. The deployment of generated grasps on a 2-finger gripper and an Allegro hand shows that the diversity produced maintains sim-to-real transferability. We believe these results to be a significant step toward the generation of large datasets that can lead to robust and generalizing robotic grasping policies.