 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntegrating Multi-Physics Simulations and Machine Learning to Define the Spatter Mechanism and Process Window in Laser Powder Bed Fusion
May 13, 2024



Laser powder bed fusion (LPBF) has shown promise for wide range of applications due to its ability to fabricate freeform geometries and generate a controlled microstructure. However, components generated by LPBF still possess sub-optimal mechanical properties due to the defects that are created during laser-material interactions. In this work, we investigate mechanism of spatter formation, using a high-fidelity modelling tool that was built to simulate the multi-physics phenomena in LPBF. The modelling tool have the capability to capture the 3D resolution of the meltpool and the spatter behavior. To understand spatter behavior and formation, we reveal its properties at ejection and evaluate its variation from the meltpool, the source where it is formed. The dataset of the spatter and the meltpool collected consist of 50 % spatter and 50 % melt pool samples, with features that include position components, velocity components, velocity magnitude, temperature, density and pressure. The relationship between the spatter and the meltpool were evaluated via correlation analysis and machine learning (ML) algorithms for classification tasks. Upon screening different ML algorithms on the dataset, a high accuracy was observed for all the ML models, with ExtraTrees having the highest at 96 % and KNN having the lowest at 94 %.
RNN-based Pedestrian Crossing Prediction using Activity and Pose-related Features
Aug 26, 2020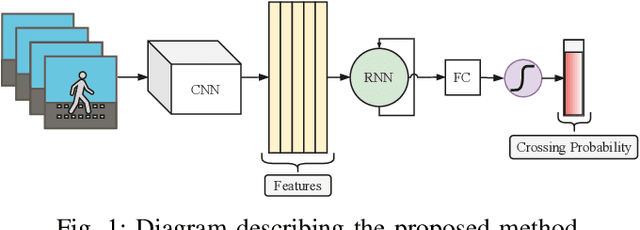
Pedestrian crossing prediction is a crucial task for autonomous driving. Numerous studies show that an early estimation of the pedestrian's intention can decrease or even avoid a high percentage of accidents. In this paper, different variations of a deep learning system are proposed to attempt to solve this problem. The proposed models are composed of two parts: a CNN-based feature extractor and an RNN module. All the models were trained and tested on the JAAD dataset. The results obtained indicate that the choice of the features extraction method, the inclusion of additional variables such as pedestrian gaze direction and discrete orientation, and the chosen RNN type have a significant impact on the final performance.
Pedestrian Prediction by Planning using Deep Neural Networks
Jun 20, 2017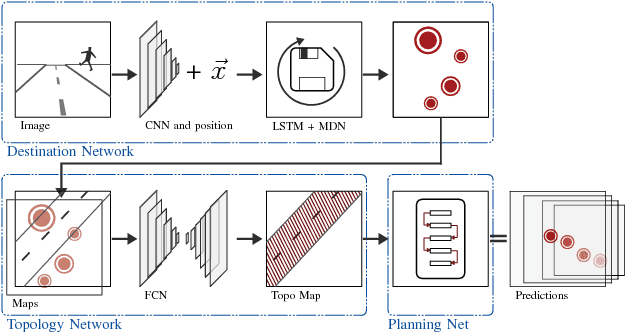
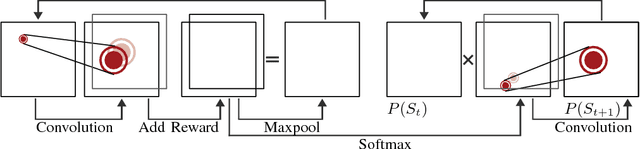

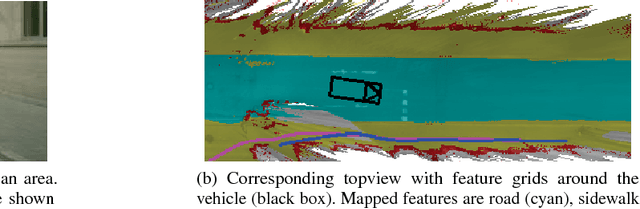
Accurate traffic participant prediction is the prerequisite for collision avoidance of autonomous vehicles. In this work, we predict pedestrians by emulating their own motion planning. From online observations, we infer a mixture density function for possible destinations. We use this result as the goal states of a planning stage that performs motion prediction based on common behavior patterns. The entire system is modeled as one monolithic neural network and trained via inverse reinforcement learning. Experimental validation on real world data shows the system's ability to predict both, destinations and trajectories accurately.