 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExperimental Insights Towards Explainable and Interpretable Pedestrian Crossing Prediction
Dec 05, 2023In the context of autonomous driving, pedestrian crossing prediction is a key component for improving road safety. Presently, the focus of these predictions extends beyond achieving trustworthy results; it is shifting towards the explainability and interpretability of these predictions. This research introduces a novel neuro-symbolic approach that combines deep learning and fuzzy logic for an explainable and interpretable pedestrian crossing prediction. We have developed an explainable predictor (ExPedCross), which utilizes a set of explainable features and employs a fuzzy inference system to predict whether the pedestrian will cross or not. Our approach was evaluated on both the PIE and JAAD datasets. The results offer experimental insights into achieving explainability and interpretability in the pedestrian crossing prediction task. Furthermore, the testing results yield a set of guidelines and recommendations regarding the process of dataset selection, feature selection, and explainability.
RNN-based Pedestrian Crossing Prediction using Activity and Pose-related Features
Aug 26, 2020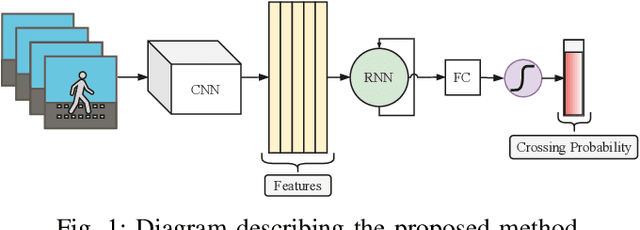
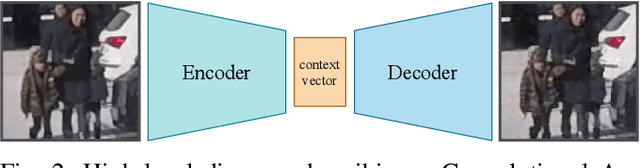
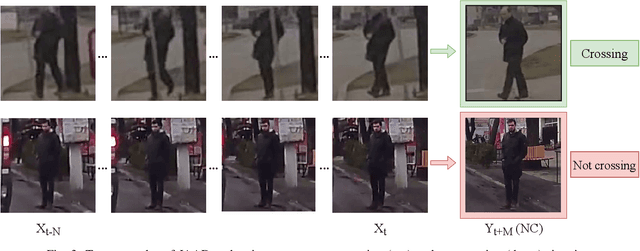
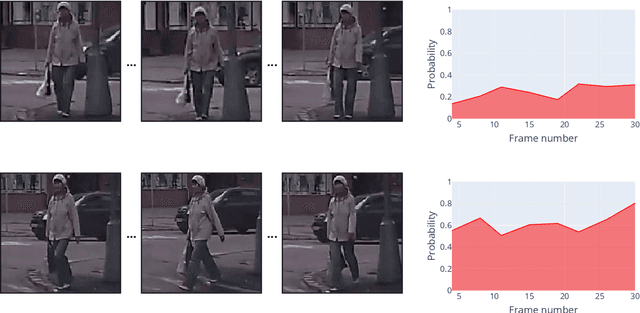
Pedestrian crossing prediction is a crucial task for autonomous driving. Numerous studies show that an early estimation of the pedestrian's intention can decrease or even avoid a high percentage of accidents. In this paper, different variations of a deep learning system are proposed to attempt to solve this problem. The proposed models are composed of two parts: a CNN-based feature extractor and an RNN module. All the models were trained and tested on the JAAD dataset. The results obtained indicate that the choice of the features extraction method, the inclusion of additional variables such as pedestrian gaze direction and discrete orientation, and the chosen RNN type have a significant impact on the final performance.
Pedestrian Path, Pose and Intention Prediction through Gaussian Process Dynamical Models and Pedestrian Activity Recognition
Apr 30, 2020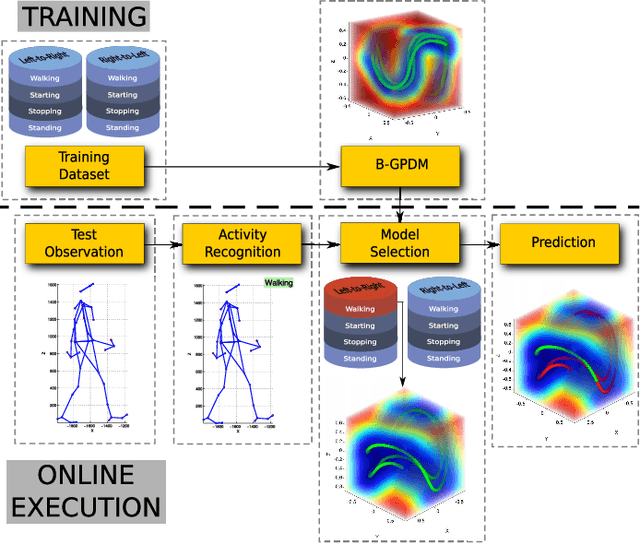
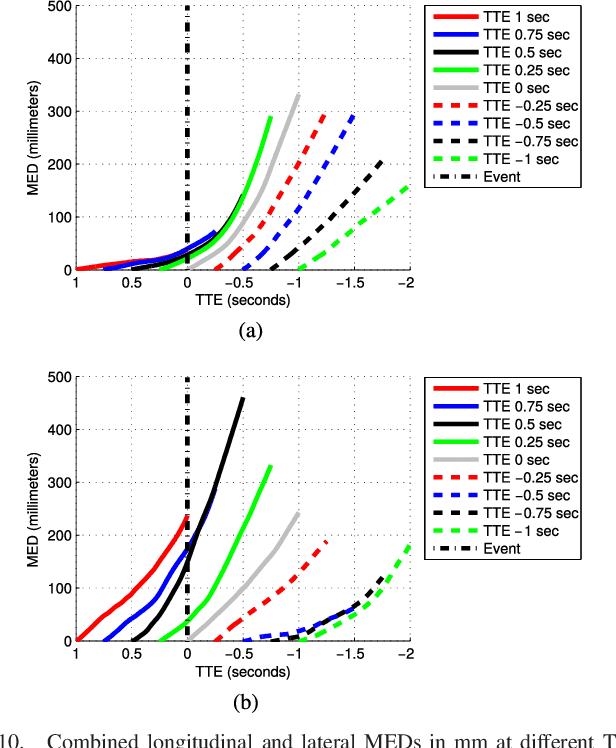
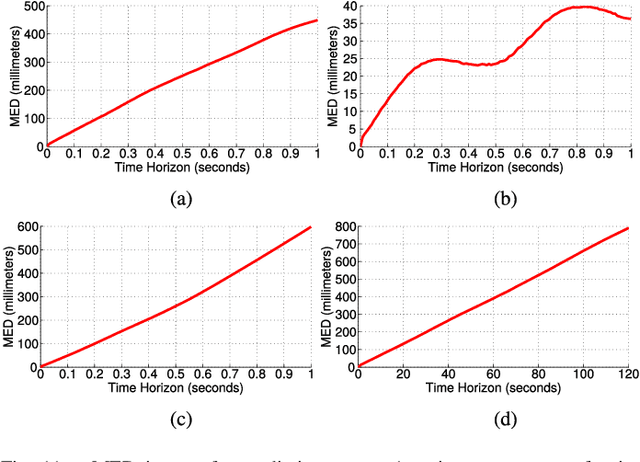
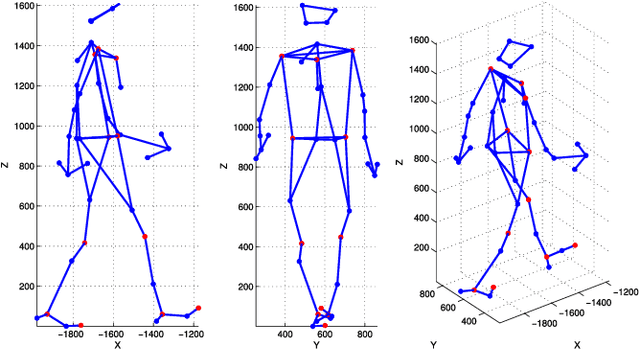
According to several reports published by worldwide organisations, thousands of pedestrians die in road accidents every year. Due to this fact, vehicular technologies have been evolving with the intent of reducing these fatalities. This evolution has not finished yet since, for instance, the predictions of pedestrian paths could improve the current Automatic Emergency Braking Systems (AEBS). For this reason, this paper proposes a method to predict future pedestrian paths, poses and intentions up to 1s in advance. This method is based on Balanced Gaussian Process Dynamical Models (B-GPDMs), which reduce the 3D time-related information extracted from keypoints or joints placed along pedestrian bodies into low-dimensional spaces. The B-GPDM is also capable of inferring future latent positions and reconstruct their associated observations. However, learning a generic model for all kind of pedestrian activities normally provides less ccurate predictions. For this reason, the proposed method obtains multiple models of four types of activity, i.e. walking, stopping, starting and standing, and selects the most similar model to estimate future pedestrian states. This method detects starting activities 125ms after the gait initiation with an accuracy of 80% and recognises stopping intentions 58.33ms before the event with an accuracy of 70%. Concerning the path prediction, the mean error for stopping activities at a Time-To-Event (TTE) of 1s is 238.01mm and, for starting actions, the mean error at a TTE of 0s is 331.93mm.