 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultimodal Large Language Models with Fusion Low Rank Adaptation for Device Directed Speech Detection
Jun 13, 2024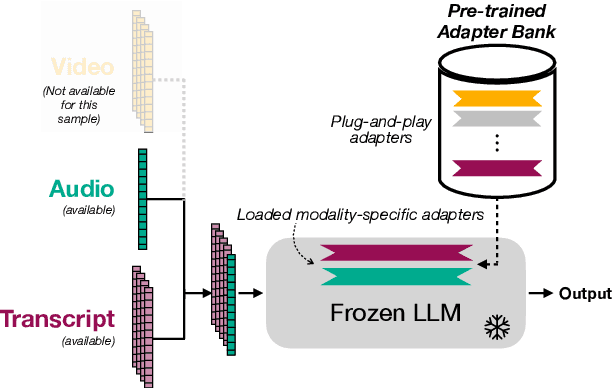
Although Large Language Models (LLMs) have shown promise for human-like conversations, they are primarily pre-trained on text data. Incorporating audio or video improves performance, but collecting large-scale multimodal data and pre-training multimodal LLMs is challenging. To this end, we propose a Fusion Low Rank Adaptation (FLoRA) technique that efficiently adapts a pre-trained unimodal LLM to consume new, previously unseen modalities via low rank adaptation. For device-directed speech detection, using FLoRA, the multimodal LLM achieves 22% relative reduction in equal error rate (EER) over the text-only approach and attains performance parity with its full fine-tuning (FFT) counterpart while needing to tune only a fraction of its parameters. Furthermore, with the newly introduced adapter dropout, FLoRA is robust to missing data, improving over FFT by 20% lower EER and 56% lower false accept rate. The proposed approach scales well for model sizes from 16M to 3B parameters.
Athletic Mobile Manipulator System for Robotic Wheelchair Tennis
Oct 05, 2022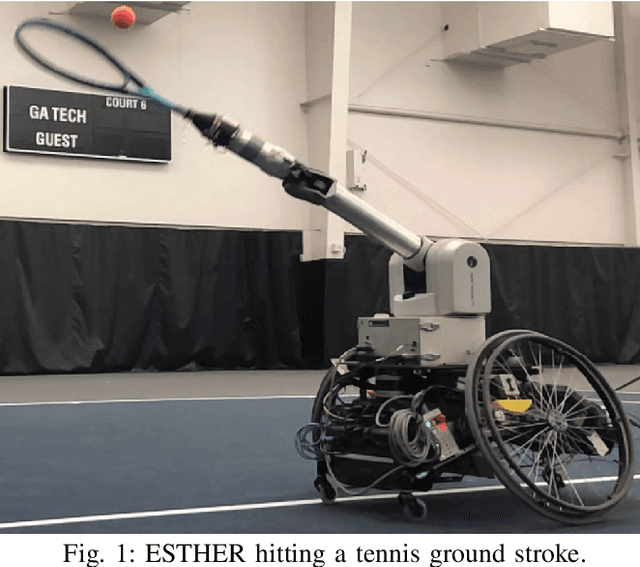
Athletics are a quintessential and universal expression of humanity. From French monks who in the 12th century invented jeu de paume, the precursor to modern lawn tennis, back to the K'iche' people who played the Maya Ballgame as a form of religious expression over three thousand years ago, humans have sought to train their minds and bodies to excel in sporting contests. Advances in robotics are opening up the possibility of robots in sports. Yet, key challenges remain, as most prior works in robotics for sports are limited to pristine sensing environments, do not require significant force generation, or are on miniaturized scales unsuited for joint human-robot play. In this paper, we propose the first open-source, autonomous robot for playing regulation wheelchair tennis. We demonstrate the performance of our full-stack system in executing ground strokes and evaluate each of the system's hardware and software components. The goal of this paper is to (1) inspire more research in human-scale robot athletics and (2) establish the first baseline towards developing a robot in future work that can serve as a teammate for mixed, human-robot doubles play. Our paper contributes to the science of systems design and poses a set of key challenges for the robotics community to address in striving towards a vision of human-robot collaboration in sports.