 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntrospective Robot Perception using Smoothed Predictions from Bayesian Neural Networks
Sep 27, 2021



This work focuses on improving uncertainty estimation in the field of object classification from RGB images and demonstrates its benefits in two robotic applications. We employ a (BNN), and evaluate two practical inference techniques to obtain better uncertainty estimates, namely Concrete Dropout (CDP) and Kronecker-factored Laplace Approximation (LAP). We show a performance increase using more reliable uncertainty estimates as unary potentials within a Conditional Random Field (CRF), which is able to incorporate contextual information as well. Furthermore, the obtained uncertainties are exploited to achieve domain adaptation in a semi-supervised manner, which requires less manual efforts in annotating data. We evaluate our approach on two public benchmark datasets that are relevant for robot perception tasks.
Amortized Object and Scene Perception for Long-term Robot Manipulation
Mar 28, 2019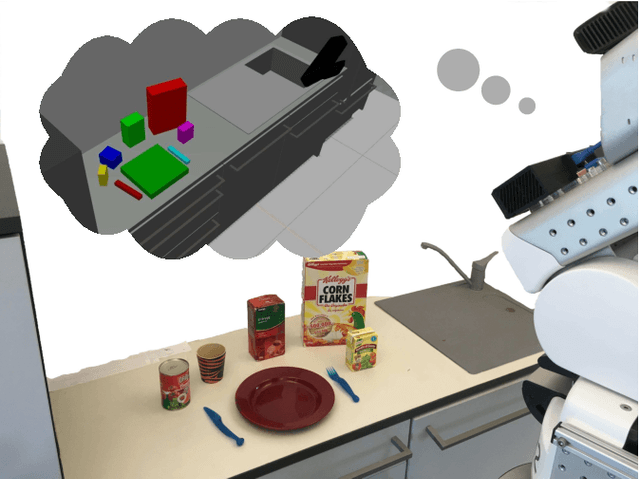
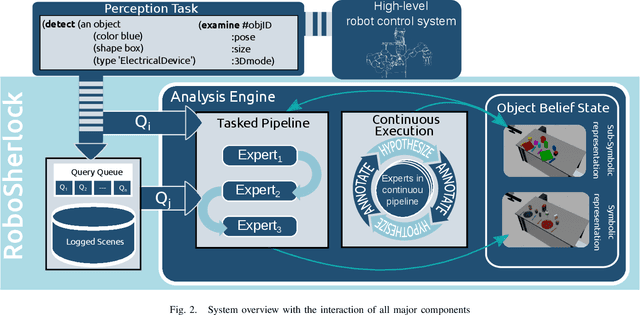
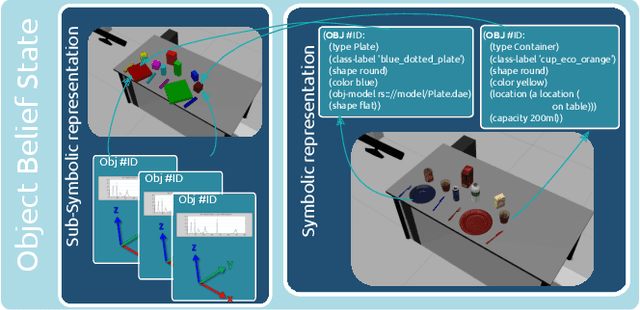
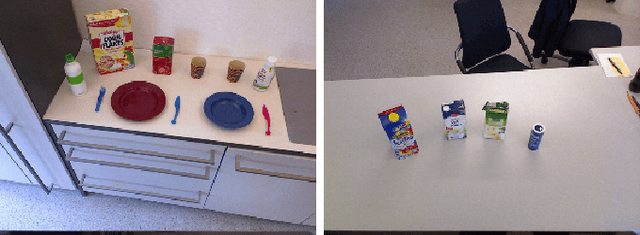
Mobile robots, performing long-term manipulation activities in human environments, have to perceive a wide variety of objects possessing very different visual characteristics and need to reliably keep track of these throughout the execution of a task. In order to be efficient, robot perception capabilities need to go beyond what is currently perceivable and should be able to answer queries about both current and past scenes. In this paper we investigate a perception system for long-term robot manipulation that keeps track of the changing environment and builds a representation of the perceived world. Specifically we introduce an amortized component that spreads perception tasks throughout the execution cycle. The resulting query driven perception system asynchronously integrates results from logged images into a symbolic and numeric (what we call sub-symbolic) representation that forms the perceptual belief state of the robot.
Knowledge-Enabled Robotic Agents for Shelf Replenishment in Cluttered Retail Environments
May 13, 2016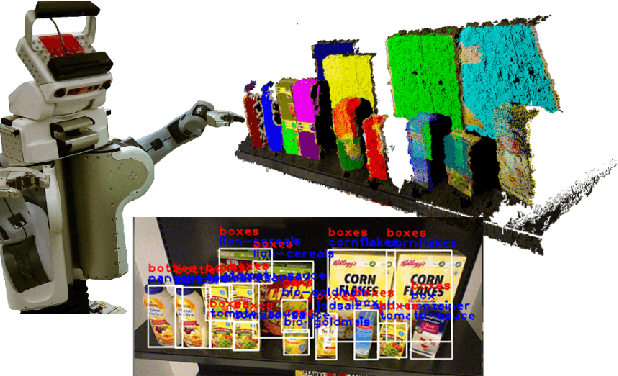
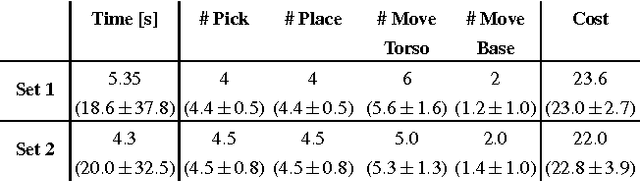
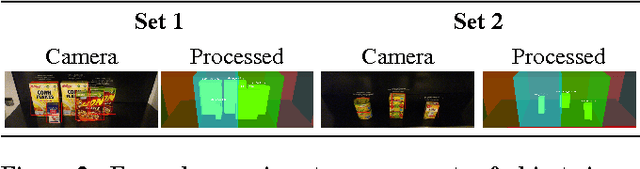
Autonomous robots in unstructured and dynamically changing retail environments have to master complex perception, knowledgeprocessing, and manipulation tasks. To enable them to act competently, we propose a framework based on three core components: (o) a knowledge-enabled perception system, capable of combining diverse information sources to cope with occlusions and stacked objects with a variety of textures and shapes, (o) knowledge processing methods produce strategies for tidying up supermarket racks, and (o) the necessary manipulation skills in confined spaces to arrange objects in semi-accessible rack shelves. We demonstrate our framework in an simulated environment as well as on a real shopping rack using a PR2 robot. Typical supermarket products are detected and rearranged in the retail rack, tidying up what was found to be misplaced items.
* published in the proceedings of AAMAS 2016 as an extended abstract