 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeForceFormer: Exploring Social Force and Transformer for Pedestrian Trajectory Prediction
Feb 15, 2023Predicting trajectories of pedestrians based on goal information in highly interactive scenes is a crucial step toward Intelligent Transportation Systems and Autonomous Driving. The challenges of this task come from two key sources: (1) complex social interactions in high pedestrian density scenarios and (2) limited utilization of goal information to effectively associate with past motion information. To address these difficulties, we integrate social forces into a Transformer-based stochastic generative model backbone and propose a new goal-based trajectory predictor called ForceFormer. Differentiating from most prior works that simply use the destination position as an input feature, we leverage the driving force from the destination to efficiently simulate the guidance of a target on a pedestrian. Additionally, repulsive forces are used as another input feature to describe the avoidance action among neighboring pedestrians. Extensive experiments show that our proposed method achieves on-par performance measured by distance errors with the state-of-the-art models but evidently decreases collisions, especially in dense pedestrian scenarios on widely used pedestrian datasets.
SFMGNet: A Physics-based Neural Network To Predict Pedestrian Trajectories
Feb 06, 2022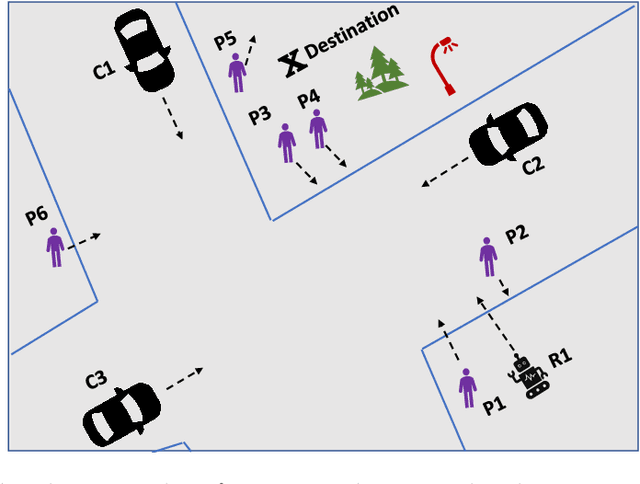
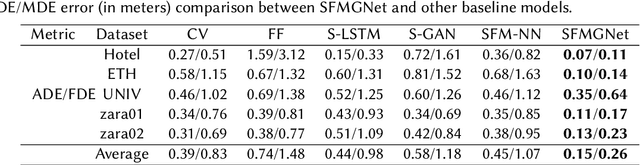
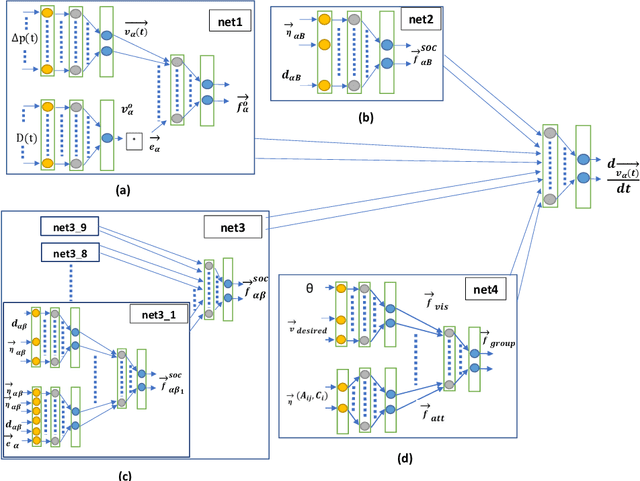
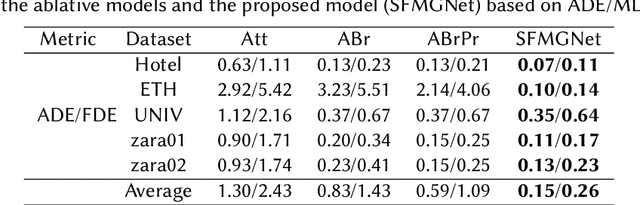
Autonomous robots and vehicles are expected to soon become an integral part of our environment. Unsatisfactory issues regarding interaction with existing road users, performance in mixed-traffic areas and lack of interpretable behavior remain key obstacles. To address these, we present a physics-based neural network, based on a hybrid approach combining a social force model extended by group force (SFMG) with Multi-Layer Perceptron (MLP) to predict pedestrian trajectories considering its interaction with static obstacles, other pedestrians and pedestrian groups. We quantitatively and qualitatively evaluate the model with respect to realistic prediction, prediction performance and prediction "interpretability". Initial results suggest, the model even when solely trained on a synthetic dataset, can predict realistic and interpretable trajectories with better than state-of-the-art accuracy.
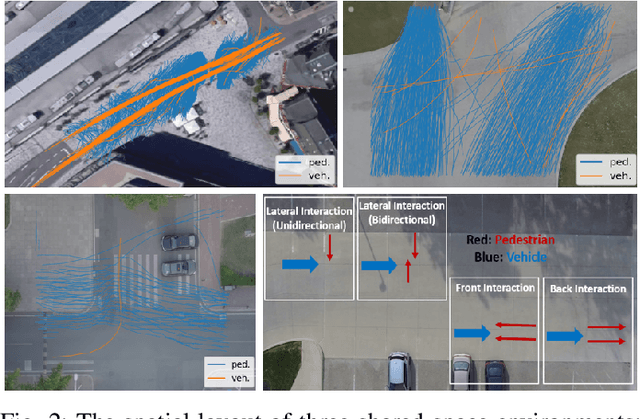
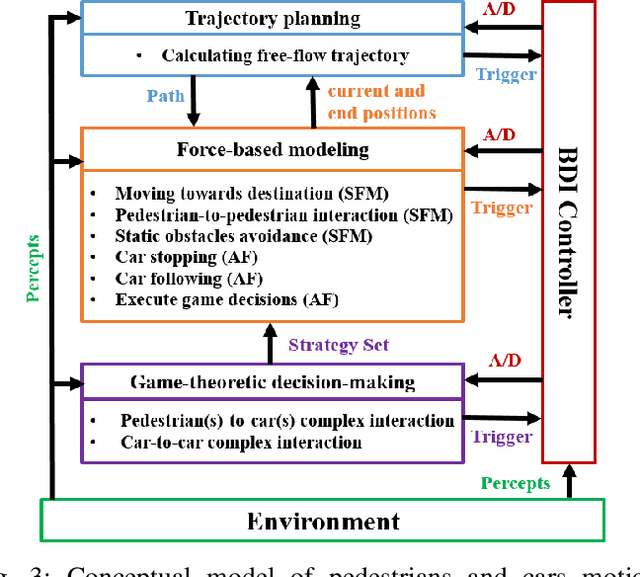
Modeling Interactions of Multimodal Road Users in Shared Spaces
Jul 05, 2021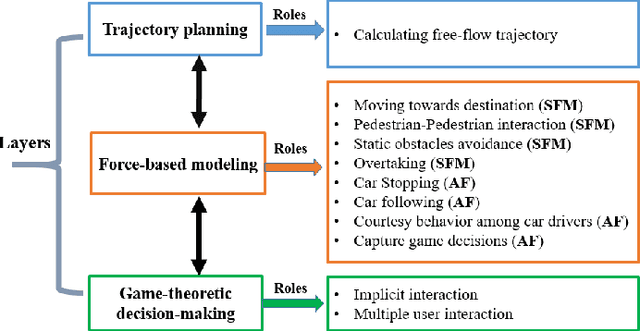
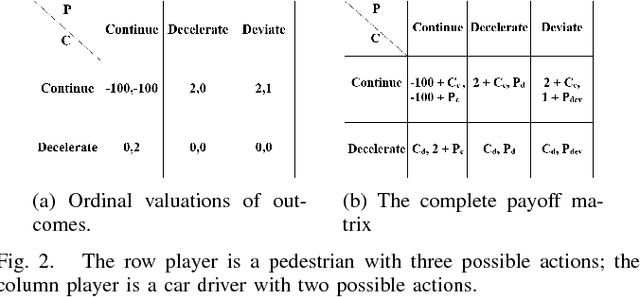
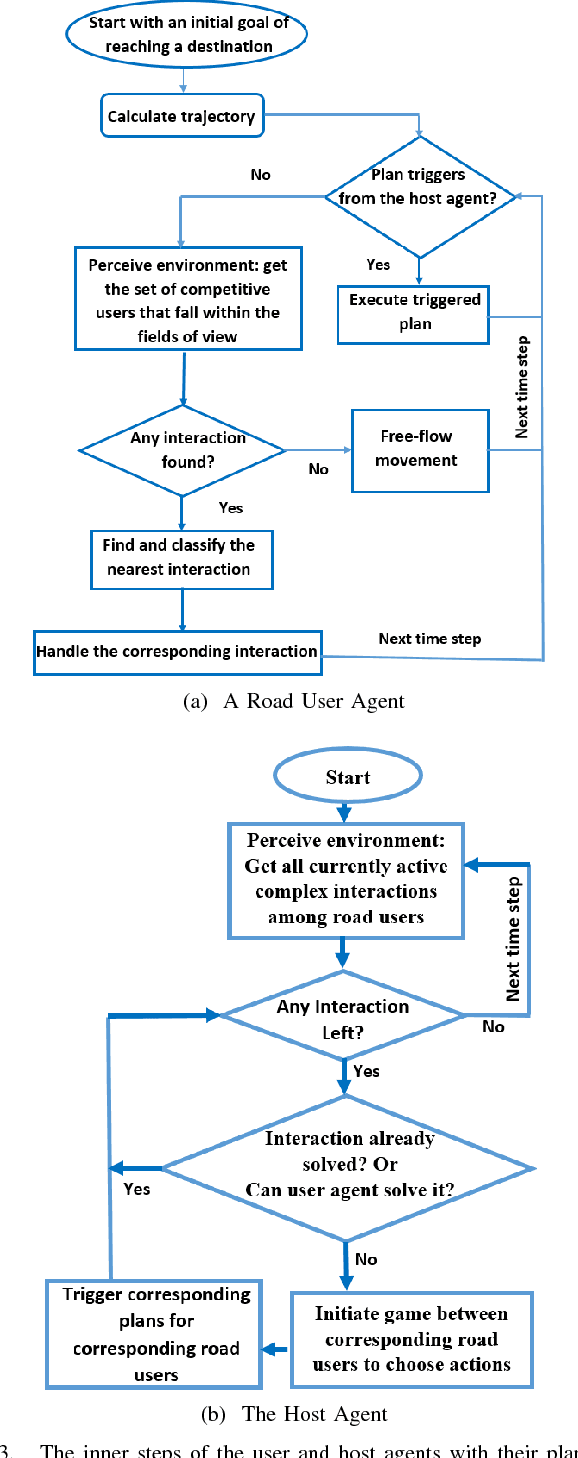
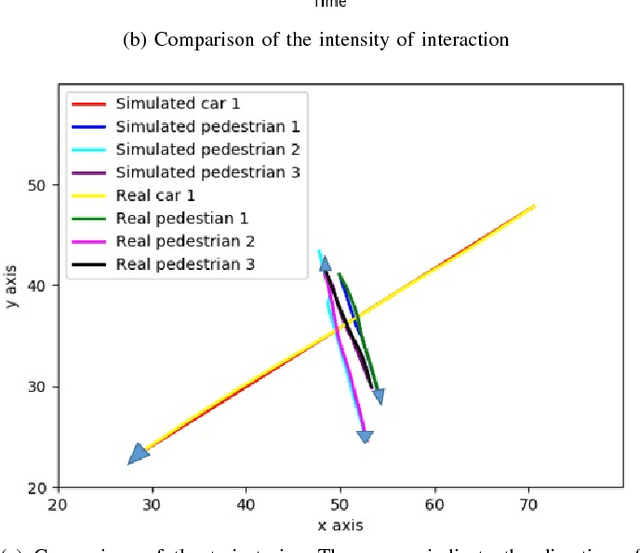
In shared spaces, motorized and non-motorized road users share the same space with equal priority. Their movements are not regulated by traffic rules, hence they interact more frequently to negotiate priority over the shared space. To estimate the safeness and efficiency of shared spaces, reproducing the traffic behavior in such traffic places is important. In this paper, we consider and combine different levels of interaction between pedestrians and cars in shared space environments. Our proposed model consists of three layers: a layer to plan trajectories of road users; a force-based modeling layer to reproduce free flow movement and simple interactions; and a game-theoretic decision layer to handle complex situations where road users need to make a decision over different alternatives. We validate our model by simulating scenarios involving various interactions between pedestrians and cars and also car-to-car interaction. The results indicate that simulated behaviors match observed behaviors well.
On the Generalizability of Motion Models for Road Users in Heterogeneous Shared Traffic Spaces
Jan 18, 2021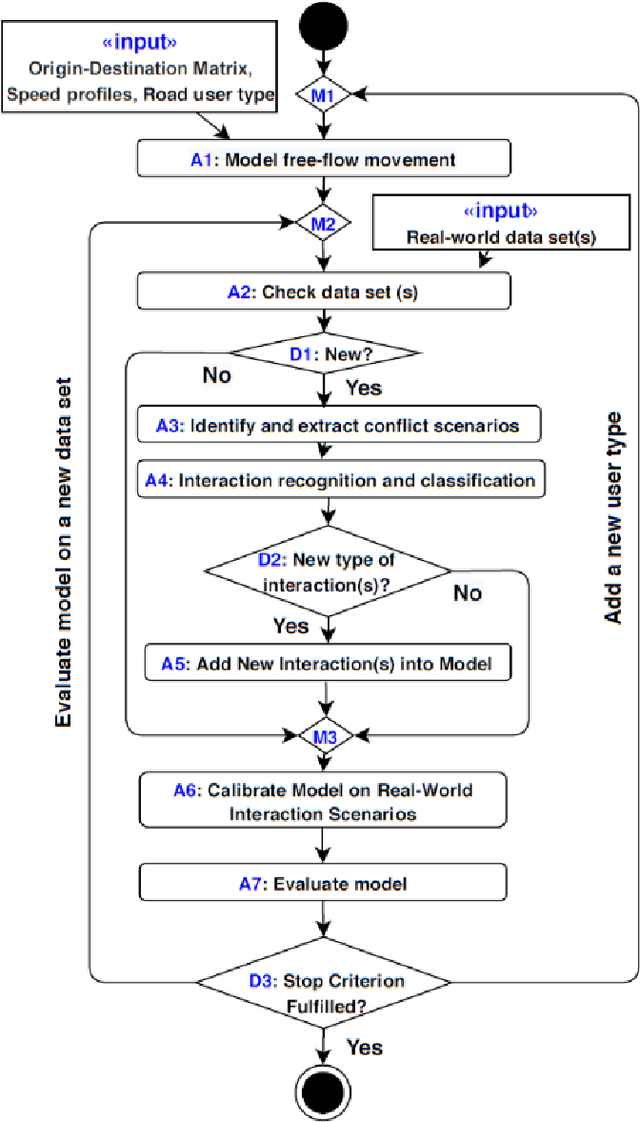

Modeling mixed-traffic motion and interactions is crucial to assess safety, efficiency, and feasibility of future urban areas. The lack of traffic regulations, diverse transport modes, and the dynamic nature of mixed-traffic zones like shared spaces make realistic modeling of such environments challenging. This paper focuses on the generalizability of the motion model, i.e., its ability to generate realistic behavior in different environmental settings, an aspect which is lacking in existing works. Specifically, our first contribution is a novel and systematic process of formulating general motion models and application of this process is to extend our Game-Theoretic Social Force Model (GSFM) towards a general model for generating a large variety of motion behaviors of pedestrians and cars from different shared spaces. Our second contribution is to consider different motion patterns of pedestrians by calibrating motion-related features of individual pedestrian and clustering them into groups. We analyze two clustering approaches. The calibration and evaluation of our model are performed on three different shared space data sets. The results indicate that our model can realistically simulate a wide range of motion behaviors and interaction scenarios, and that adding different motion patterns of pedestrians into our model improves its performance.
Sub-Goal Social Force Model for Collective Pedestrian Motion Under Vehicle Influence
Jan 10, 2021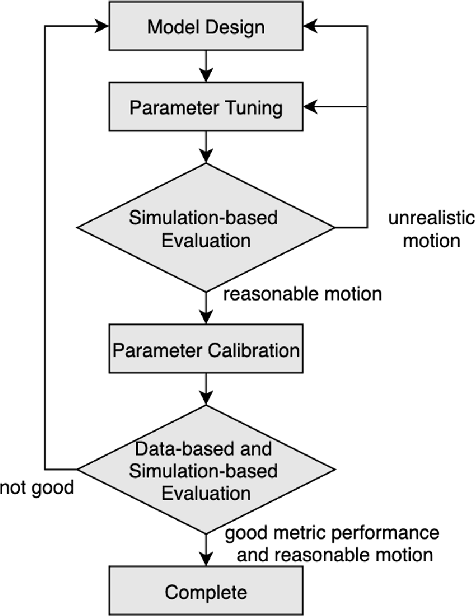
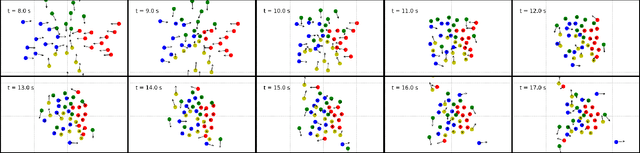
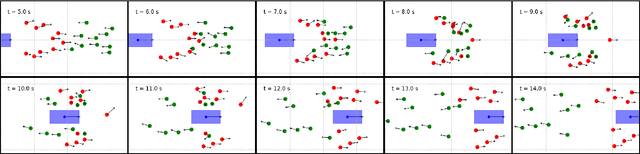
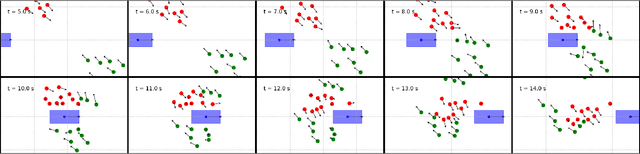
In mixed traffic scenarios, a certain number of pedestrians might coexist in a small area while interacting with vehicles. In this situation, every pedestrian must simultaneously react to the surrounding pedestrians and vehicles. Analytical modeling of such collective pedestrian motion can benefit intelligent transportation practices like shared space design and urban autonomous driving. This work proposed the sub-goal social force model (SG-SFM) to describe the collective pedestrian motion under vehicle influence. The proposed model introduced a new design of vehicle influence on pedestrian motion, which was smoothly combined with the influence of surrounding pedestrians using the sub-goal concept. This model aims to describe generalized pedestrian motion, i.e., it is applicable to various vehicle-pedestrian interaction patterns. The generalization was verified by both quantitative and qualitative evaluation. The quantitative evaluation was conducted to reproduce pedestrian motion in three different datasets, HBS, CITR, and DUT. It also compared two different ways of calibrating the model parameters. The qualitative evaluation examined the simulation of collective pedestrian motion in a series of fundamental vehicle-pedestrian interaction scenarios. The above evaluation results demonstrated the effectiveness of the proposed model.