 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Uncertainty-Weighted Decision Transformer for Navigation in Dense, Complex Driving Scenarios
Sep 16, 2025Autonomous driving in dense, dynamic environments requires decision-making systems that can exploit both spatial structure and long-horizon temporal dependencies while remaining robust to uncertainty. This work presents a novel framework that integrates multi-channel bird's-eye-view occupancy grids with transformer-based sequence modeling for tactical driving in complex roundabout scenarios. To address the imbalance between frequent low-risk states and rare safety-critical decisions, we propose the Uncertainty-Weighted Decision Transformer (UWDT). UWDT employs a frozen teacher transformer to estimate per-token predictive entropy, which is then used as a weight in the student model's loss function. This mechanism amplifies learning from uncertain, high-impact states while maintaining stability across common low-risk transitions. Experiments in a roundabout simulator, across varying traffic densities, show that UWDT consistently outperforms other baselines in terms of reward, collision rate, and behavioral stability. The results demonstrate that uncertainty-aware, spatial-temporal transformers can deliver safer and more efficient decision-making for autonomous driving in complex traffic environments.
Bootstrapping Reinforcement Learning with Sub-optimal Policies for Autonomous Driving
Sep 04, 2025Automated vehicle control using reinforcement learning (RL) has attracted significant attention due to its potential to learn driving policies through environment interaction. However, RL agents often face training challenges in sample efficiency and effective exploration, making it difficult to discover an optimal driving strategy. To address these issues, we propose guiding the RL driving agent with a demonstration policy that need not be a highly optimized or expert-level controller. Specifically, we integrate a rule-based lane change controller with the Soft Actor Critic (SAC) algorithm to enhance exploration and learning efficiency. Our approach demonstrates improved driving performance and can be extended to other driving scenarios that can similarly benefit from demonstration-based guidance.
Extensive Exploration in Complex Traffic Scenarios using Hierarchical Reinforcement Learning
Jan 25, 2025Developing an automated driving system capable of navigating complex traffic environments remains a formidable challenge. Unlike rule-based or supervised learning-based methods, Deep Reinforcement Learning (DRL) based controllers eliminate the need for domain-specific knowledge and datasets, thus providing adaptability to various scenarios. Nonetheless, a common limitation of existing studies on DRL-based controllers is their focus on driving scenarios with simple traffic patterns, which hinders their capability to effectively handle complex driving environments with delayed, long-term rewards, thus compromising the generalizability of their findings. In response to these limitations, our research introduces a pioneering hierarchical framework that efficiently decomposes intricate decision-making problems into manageable and interpretable subtasks. We adopt a two step training process that trains the high-level controller and low-level controller separately. The high-level controller exhibits an enhanced exploration potential with long-term delayed rewards, and the low-level controller provides longitudinal and lateral control ability using short-term instantaneous rewards. Through simulation experiments, we demonstrate the superiority of our hierarchical controller in managing complex highway driving situations.
Training Adversarial yet Safe Agent to Characterize Safety Performance of Highly Automated Vehicles
Feb 02, 2024This paper focuses on safety performance testing and characterization of black-box highly automated vehicles (HAV). Existing testing approaches typically obtain the testing outcomes by deploying the HAV into a specific testing environment. Such a testing environment can involve various passively given testing strategies presented by other traffic participants such as (i) the naturalistic driving policy learned from human drivers, (ii) extracted concrete scenarios from real-world driving data, and (iii) model-based or data-driven adversarial testing methodologies focusing on forcing safety-critical events. The safety performance of HAV is further characterized by analyzing the obtained testing outcomes with a particular selected measure, such as the observed collision risk. The aforementioned testing practices suffer from the scarcity of safety-critical events, have limited operational design domain (ODD) coverage, or are biased toward long-tail unsafe cases. This paper presents a novel and informative testing strategy that differs from these existing practices. The proposal is inspired by the intuition that a relatively safer HAV driving policy would allow the traffic vehicles to exhibit a higher level of aggressiveness to achieve a certain fixed level of an overall safe outcome. One can specifically characterize such a HAV and traffic interactive strategy and use it as a safety performance indicator for the HAV. Under the proposed testing scheme, the HAV is evaluated under its full ODD with a reward function that represents a trade-off between safety and adversity in generating safety-critical events. The proposed methodology is demonstrated in simulation with various HAV designs under different operational design domains.
Sub-Goal Social Force Model for Collective Pedestrian Motion Under Vehicle Influence
Jan 10, 2021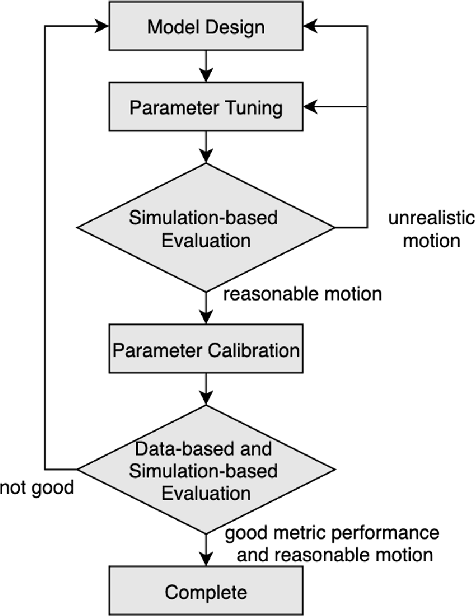
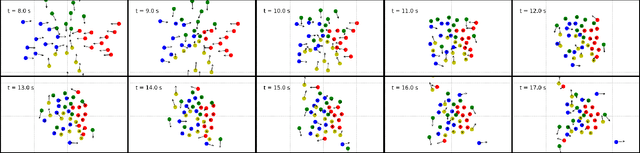
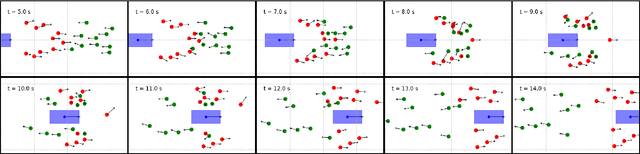
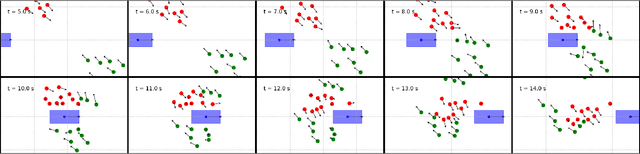
In mixed traffic scenarios, a certain number of pedestrians might coexist in a small area while interacting with vehicles. In this situation, every pedestrian must simultaneously react to the surrounding pedestrians and vehicles. Analytical modeling of such collective pedestrian motion can benefit intelligent transportation practices like shared space design and urban autonomous driving. This work proposed the sub-goal social force model (SG-SFM) to describe the collective pedestrian motion under vehicle influence. The proposed model introduced a new design of vehicle influence on pedestrian motion, which was smoothly combined with the influence of surrounding pedestrians using the sub-goal concept. This model aims to describe generalized pedestrian motion, i.e., it is applicable to various vehicle-pedestrian interaction patterns. The generalization was verified by both quantitative and qualitative evaluation. The quantitative evaluation was conducted to reproduce pedestrian motion in three different datasets, HBS, CITR, and DUT. It also compared two different ways of calibrating the model parameters. The qualitative evaluation examined the simulation of collective pedestrian motion in a series of fundamental vehicle-pedestrian interaction scenarios. The above evaluation results demonstrated the effectiveness of the proposed model.
Faraway-Frustum: Dealing with Lidar Sparsity for 3D Object Detection using Fusion
Nov 03, 2020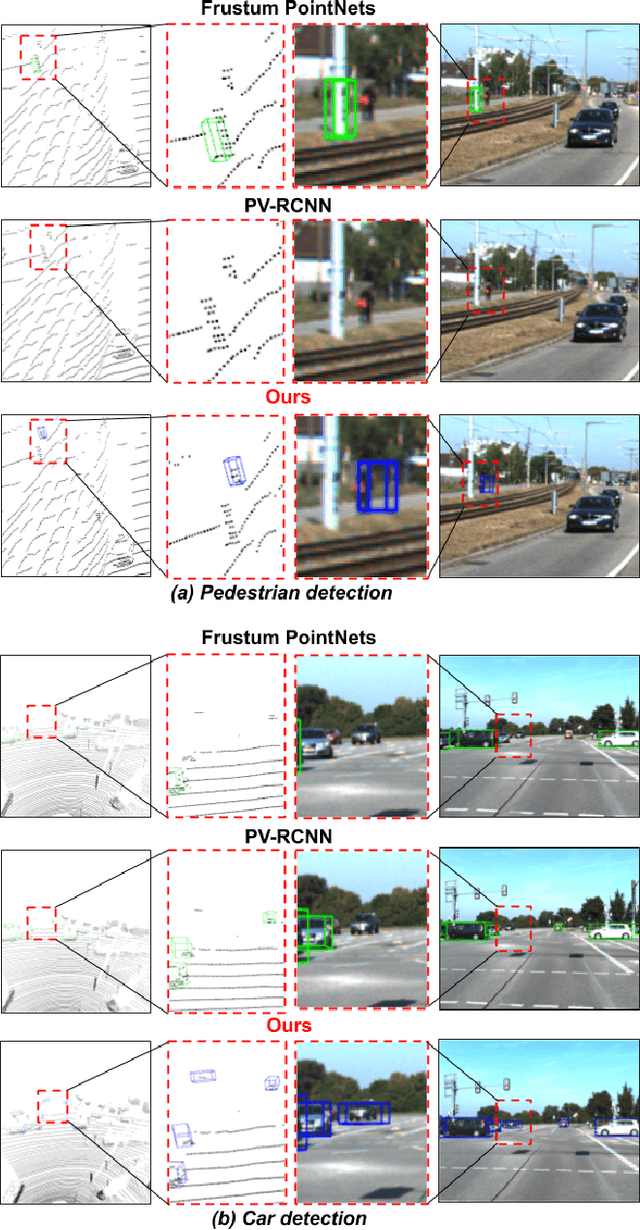
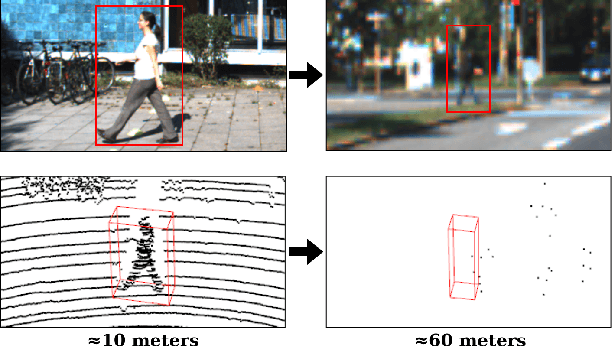

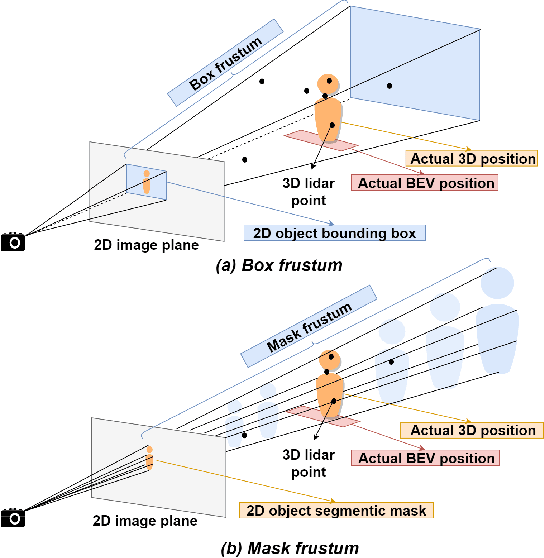
Learned pointcloud representations do not generalize well with an increase in distance to the sensor. For example, at a range greater than 60 meters, the sparsity of lidar pointclouds reaches to a point where even humans cannot discern object shapes from each other. However, this distance should not be considered very far for fast-moving vehicles: A vehicle can traverse 60 meters under two seconds while moving at 70 mph. For safe and robust driving automation, acute 3D object detection at these ranges is indispensable. Against this backdrop, we introduce faraway-frustum: a novel fusion strategy for detecting faraway objects. The main strategy is to depend solely on the 2D vision for recognizing object class, as object shape does not change drastically with an increase in depth, and use pointcloud data for object localization in the 3D space for faraway objects. For closer objects, we use learned pointcloud representations instead, following state-of-the-art. This strategy alleviates the main shortcoming of object detection with learned pointcloud representations. Experiments on the KITTI dataset demonstrate that our method outperforms state-of-the-art by a considerable margin for faraway object detection in bird's-eye-view and 3D.
Blending Generative Adversarial Image Synthesis with Rendering for Computer Graphics
Jul 31, 2020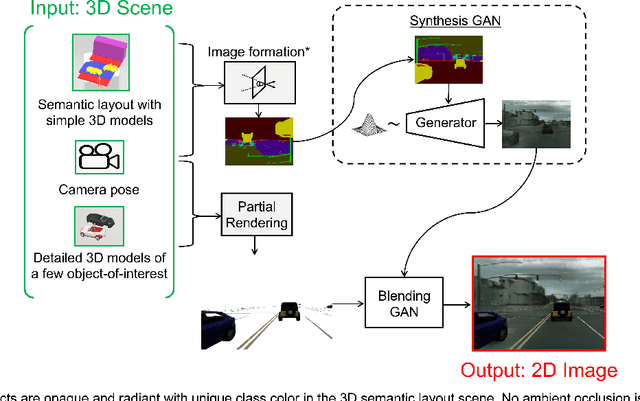
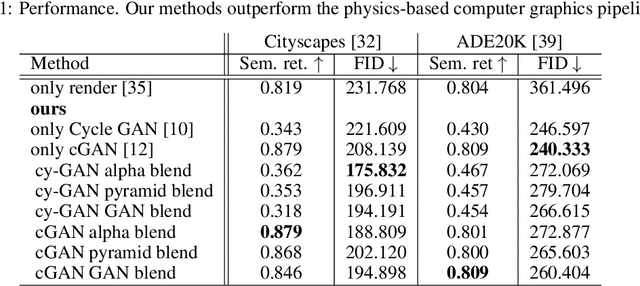
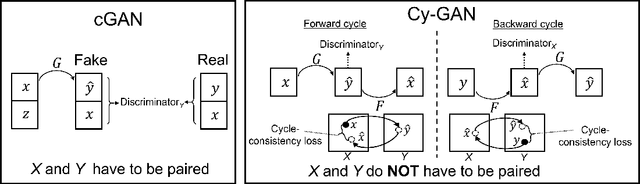
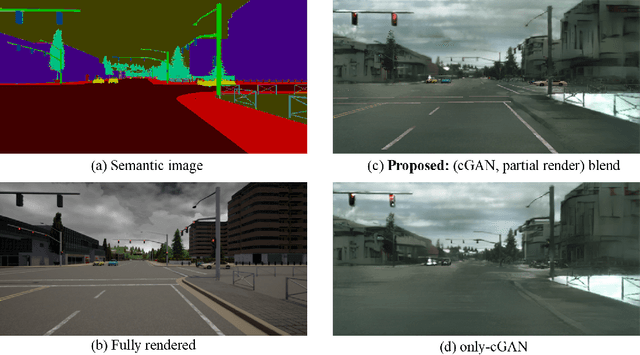
Conventional computer graphics pipelines require detailed 3D models, meshes, textures, and rendering engines to generate 2D images from 3D scenes. These processes are labor-intensive. We introduce Hybrid Neural Computer Graphics (HNCG) as an alternative. The contribution is a novel image formation strategy to reduce the 3D model and texture complexity of computer graphics pipelines. Our main idea is straightforward: Given a 3D scene, render only important objects of interest and use generative adversarial processes for synthesizing the rest of the image. To this end, we propose a novel image formation strategy to form 2D semantic images from 3D scenery consisting of simple object models without textures. These semantic images are then converted into photo-realistic RGB images with a state-of-the-art conditional Generative Adversarial Network (cGAN) based image synthesizer trained on real-world data. Meanwhile, objects of interest are rendered using a physics-based graphics engine. This is necessary as we want to have full control over the appearance of objects of interest. Finally, the partially-rendered and cGAN synthesized images are blended with a blending GAN. We show that the proposed framework outperforms conventional rendering with ablation and comparison studies. Semantic retention and Fr\'echet Inception Distance (FID) measurements were used as the main performance metrics.
A Vision-based Social Distancing and Critical Density Detection System for COVID-19
Jul 08, 2020
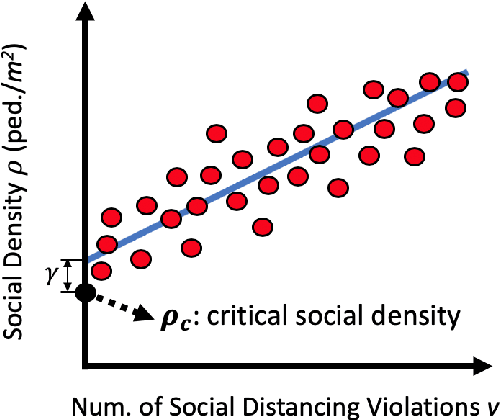
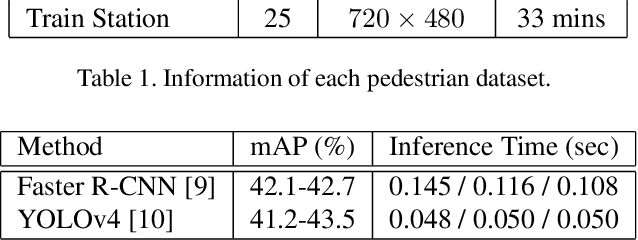
Social distancing has been proven as an effective measure against the spread of the infectious COronaVIrus Disease 2019 (COVID-19). However, individuals are not used to tracking the required 6-feet (2-meters) distance between themselves and their surroundings. An active surveillance system capable of detecting distances between individuals and warning them can slow down the spread of the deadly disease. Furthermore, measuring social density in a region of interest (ROI) and modulating inflow can decrease social distancing violation occurrence chance. On the other hand, recording data and labeling individuals who do not follow the measures will breach individuals' rights in free-societies. Here we propose an Artificial Intelligence (AI) based real-time social distancing detection and warning system considering four important ethical factors: (1) the system should never record/cache data, (2) the warnings should not target the individuals, (3) no human supervisor should be in the detection/warning loop, and (4) the code should be open-source and accessible to the public. Against this backdrop, we propose using a monocular camera and deep learning-based real-time object detectors to measure social distancing. If a violation is detected, a non-intrusive audio-visual warning signal is emitted without targeting the individual who breached the social distancing measure. Also, if the social density is over a critical value, the system sends a control signal to modulate inflow into the ROI. We tested the proposed method across real-world datasets to measure its generality and performance. The proposed method is ready for deployment, and our code is open-sourced.