 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSFMGNet: A Physics-based Neural Network To Predict Pedestrian Trajectories
Feb 06, 2022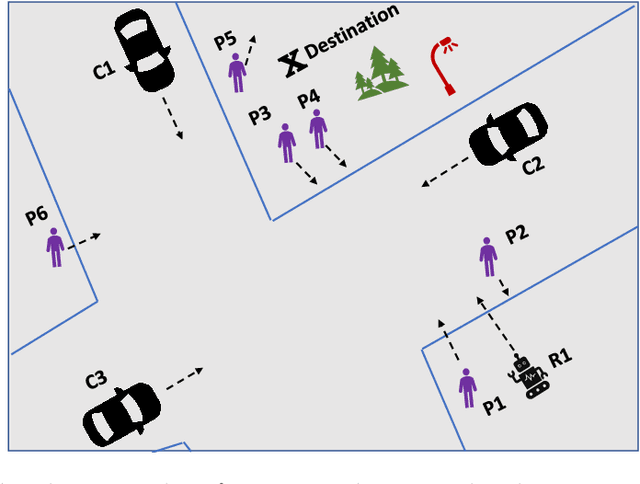
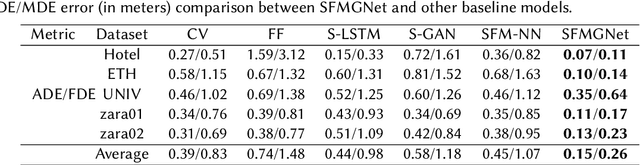
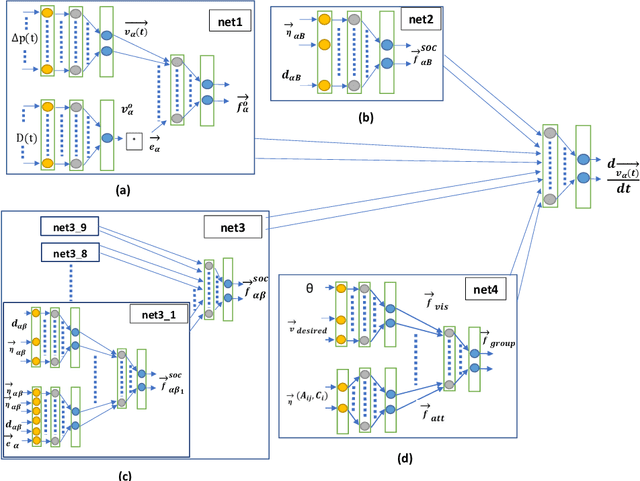
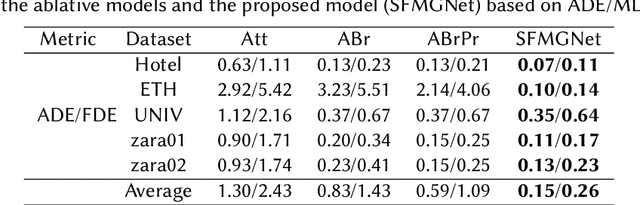
Autonomous robots and vehicles are expected to soon become an integral part of our environment. Unsatisfactory issues regarding interaction with existing road users, performance in mixed-traffic areas and lack of interpretable behavior remain key obstacles. To address these, we present a physics-based neural network, based on a hybrid approach combining a social force model extended by group force (SFMG) with Multi-Layer Perceptron (MLP) to predict pedestrian trajectories considering its interaction with static obstacles, other pedestrians and pedestrian groups. We quantitatively and qualitatively evaluate the model with respect to realistic prediction, prediction performance and prediction "interpretability". Initial results suggest, the model even when solely trained on a synthetic dataset, can predict realistic and interpretable trajectories with better than state-of-the-art accuracy.
Combined Pruning for Nested Cross-Validation to Accelerate Automated Hyperparameter Optimization for Embedded Feature Selection in High-Dimensional Data with Very Small Sample Sizes
Feb 01, 2022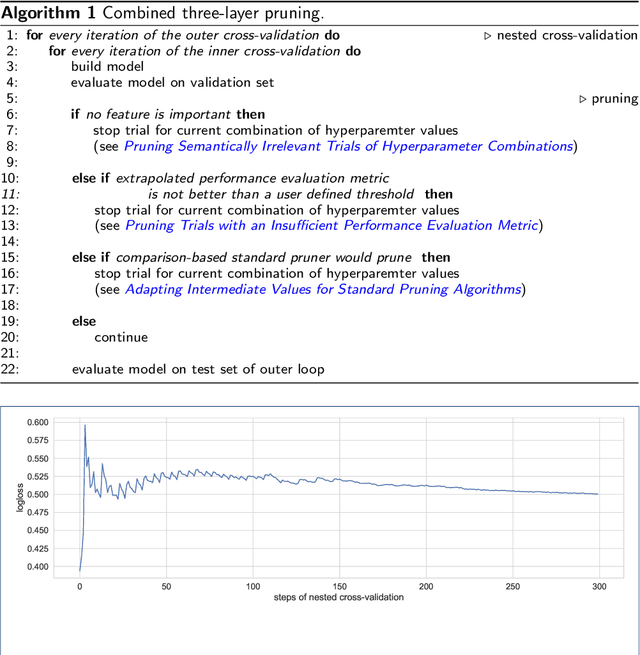
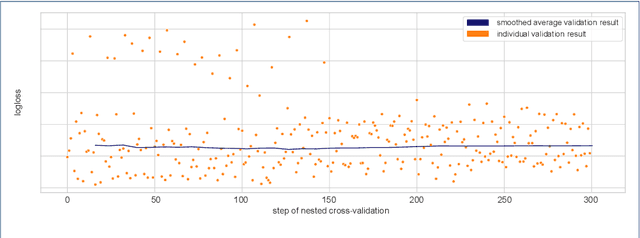
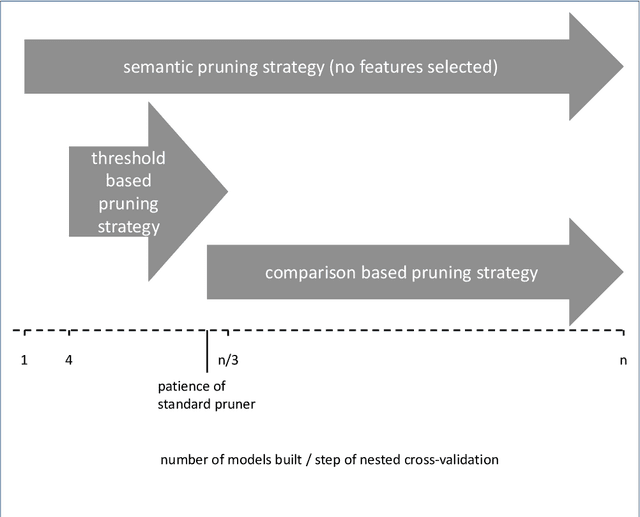
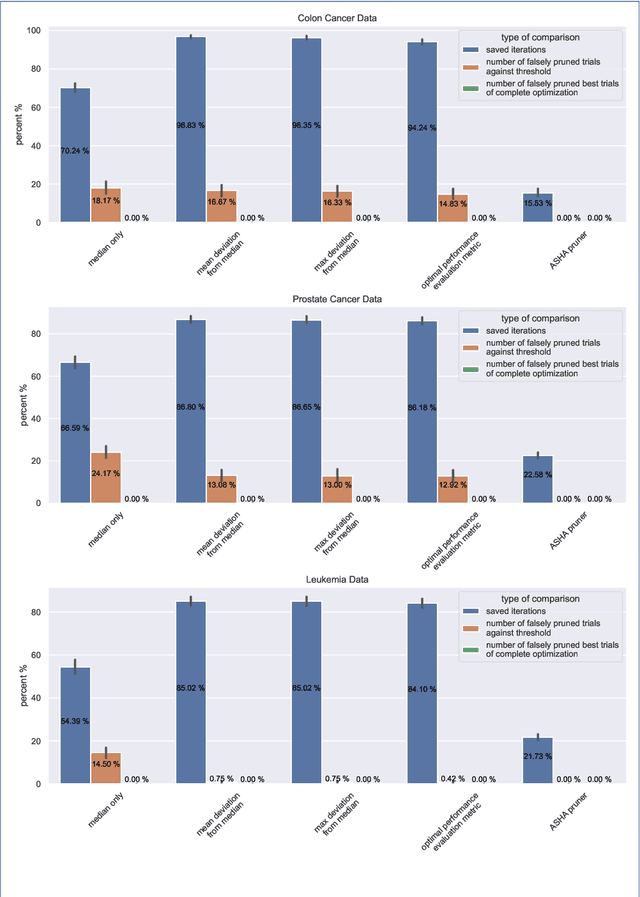
Applying tree-based embedded feature selection to exclude irrelevant features in high-dimensional data with very small sample sizes requires optimized hyperparameters for the model building process. In addition, nested cross-validation must be applied for this type of data to avoid biased model performance. The resulting long computation time can be accelerated with pruning. However, standard pruning algorithms must prune late or risk aborting calculations of promising hyperparameter sets due to high variance in the performance evaluation metric. To address this, we adapt the usage of a state-of-the-art successive halving pruner and combine it with two new pruning strategies based on domain or prior knowledge. One additional pruning strategy immediately stops the computation of trials with semantically meaningless results for the selected hyperparameter combinations. The other is an extrapolating threshold pruning strategy suitable for nested-cross-validation with high variance. Our proposed combined three-layer pruner keeps promising trials while reducing the number of models to be built by up to 81,3% compared to using a state-of-the-art asynchronous successive halving pruner alone. Our three-layer pruner implementation(available at https://github.com/sigrun-may/cv-pruner) speeds up data analysis or enables deeper hyperparameter search within the same computation time. It consequently saves time, money and energy, reducing the CO2 footprint.
Memetic EDA-Based Approaches to Comprehensive Quality-Aware Automated Semantic Web Service Composition
Jun 19, 2019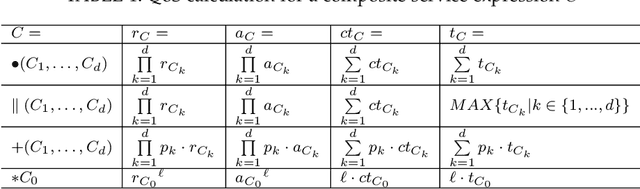
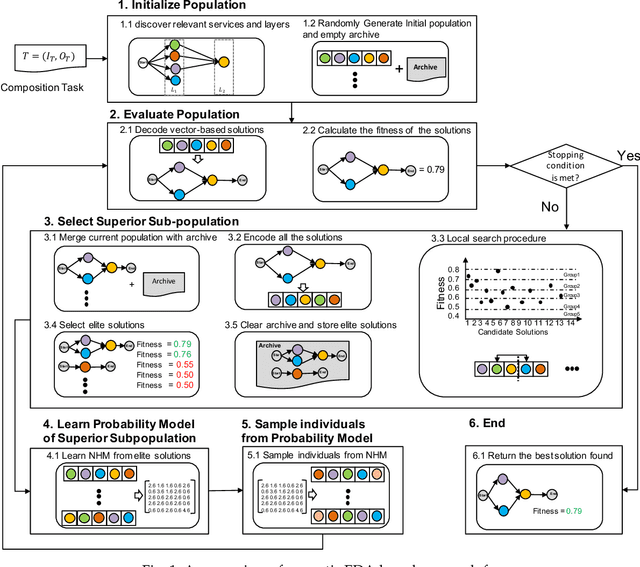
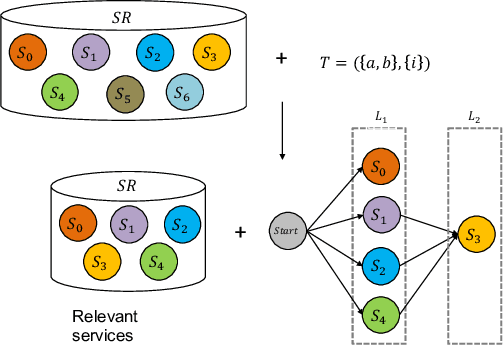
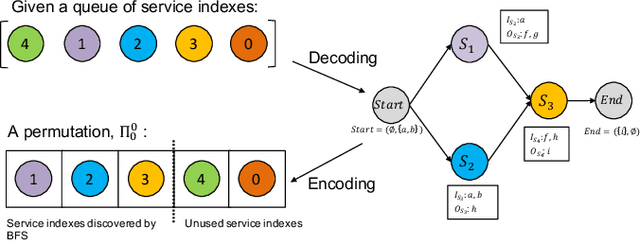
Comprehensive quality-aware automated semantic web service composition is an NP-hard problem, where service composition workflows are unknown, and comprehensive quality, i.e., Quality of services (QoS) and Quality of semantic matchmaking (QoSM) are simultaneously optimized. The objective of this problem is to find a solution with optimized or near-optimized overall QoS and QoSM within polynomial time over a service request. In this paper, we proposed novel memetic EDA-based approaches to tackle this problem. The proposed method investigates the effectiveness of several neighborhood structures of composite services by proposing domain-dependent local search operators. Apart from that, a joint strategy of the local search procedure is proposed to integrate with a modified EDA to reduce the overall computation time of our memetic approach. To better demonstrate the effectiveness and scalability of our approach, we create a more challenging, augmented version of the service composition benchmark based on WSC-08 \cite{bansal2008wsc} and WSC-09 \cite{kona2009wsc}. Experimental results on this benchmark show that one of our proposed memetic EDA-based approach (i.e., MEEDA-LOP) significantly outperforms existing state-of-the-art algorithms.
Evolutionary Multitasking for Semantic Web Service Composition
Feb 18, 2019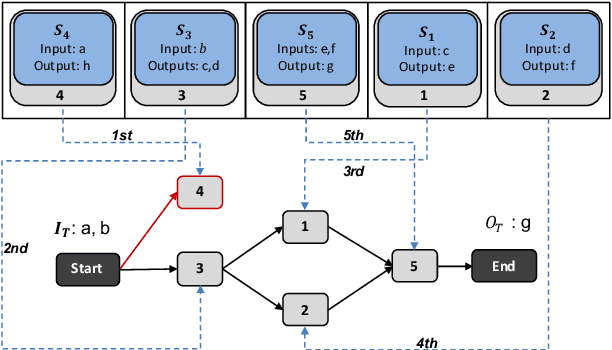
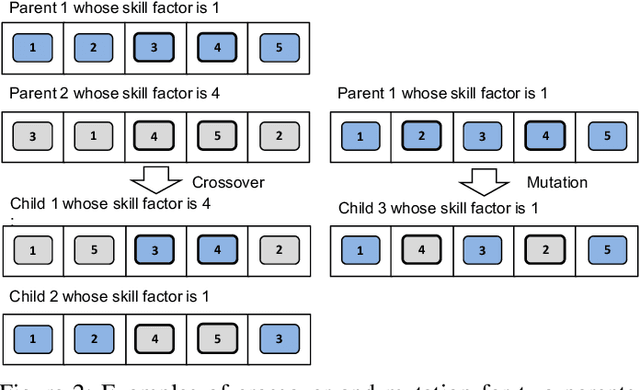
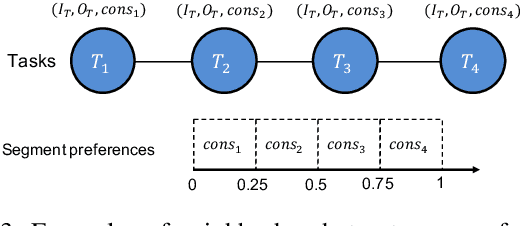
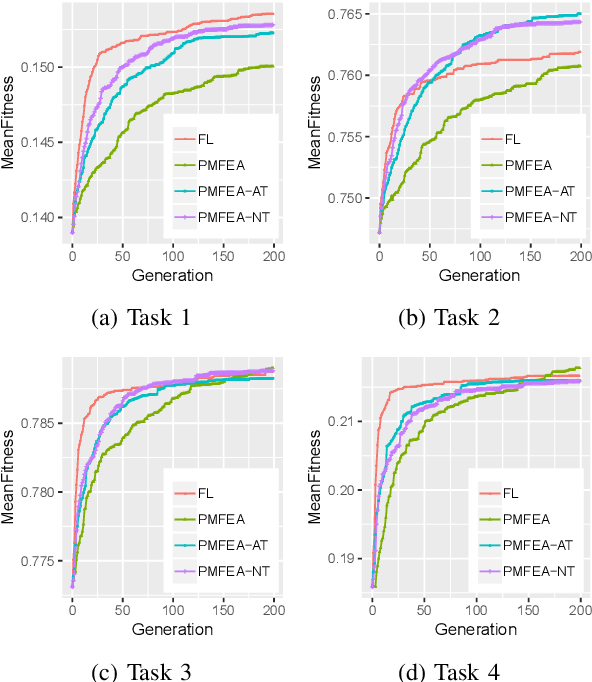
Web services are basic functions of a software system to support the concept of service-oriented architecture. They are often composed together to provide added values, known as web service composition. Researchers often employ Evolutionary Computation techniques to efficiently construct composite services with near-optimized functional quality (i.e., Quality of Semantic Matchmaking) or non-functional quality (i.e., Quality of Service) or both due to the complexity of this problem. With a significant increase in service composition requests, many composition requests have similar input and output requirements but may vary due to different preferences from different user segments. This problem is often treated as a multi-objective service composition so as to cope with different preferences from different user segments simultaneously. Without taking a multi-objective approach that gives rise to a solution selection challenge, we perceive multiple similar service composition requests as jointly forming an evolutionary multi-tasking problem in this work. We propose an effective permutation-based evolutionary multi-tasking approach that can simultaneously generate a set of solutions, with one for each service request. We also introduce a neighborhood structure over multiple tasks to allow newly evolved solutions to be evaluated on related tasks. Our proposed method can perform better at the cost of only a fraction of time, compared to one state-of-art single-tasking EC-based method. We also found that the use of the proper neighborhood structure can enhance the effectiveness of our approach.