 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEVER: Exact Volumetric Ellipsoid Rendering for Real-time View Synthesis
Oct 02, 2024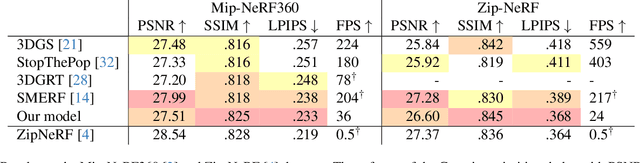
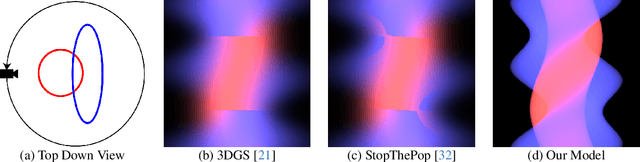
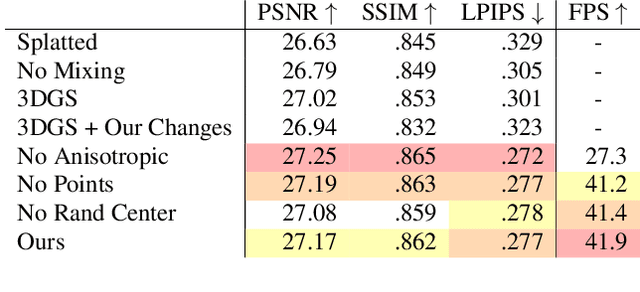
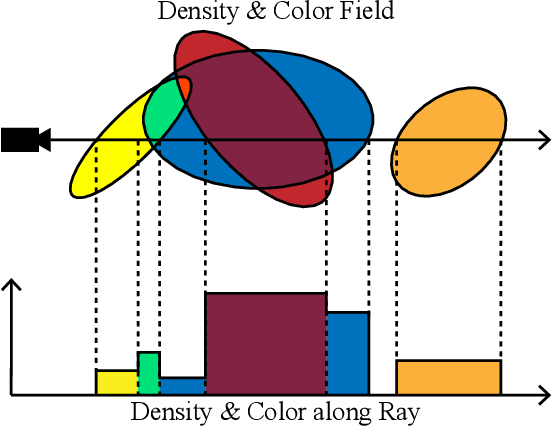
We present Exact Volumetric Ellipsoid Rendering (EVER), a method for real-time differentiable emission-only volume rendering. Unlike recent rasterization based approach by 3D Gaussian Splatting (3DGS), our primitive based representation allows for exact volume rendering, rather than alpha compositing 3D Gaussian billboards. As such, unlike 3DGS our formulation does not suffer from popping artifacts and view dependent density, but still achieves frame rates of $\sim\!30$ FPS at 720p on an NVIDIA RTX4090. Since our approach is built upon ray tracing it enables effects such as defocus blur and camera distortion (e.g. such as from fisheye cameras), which are difficult to achieve by rasterization. We show that our method is more accurate with fewer blending issues than 3DGS and follow-up work on view-consistent rendering, especially on the challenging large-scale scenes from the Zip-NeRF dataset where it achieves sharpest results among real-time techniques.
Neural Microfacet Fields for Inverse Rendering
Mar 31, 2023



We present Neural Microfacet Fields, a method for recovering materials, geometry, and environment illumination from images of a scene. Our method uses a microfacet reflectance model within a volumetric setting by treating each sample along the ray as a (potentially non-opaque) surface. Using surface-based Monte Carlo rendering in a volumetric setting enables our method to perform inverse rendering efficiently by combining decades of research in surface-based light transport with recent advances in volume rendering for view synthesis. Our approach outperforms prior work in inverse rendering, capturing high fidelity geometry and high frequency illumination details; its novel view synthesis results are on par with state-of-the-art methods that do not recover illumination or materials.
BTO-RRT: A rapid, optimal, smooth and point cloud-based path planning algorithm
Nov 13, 2022


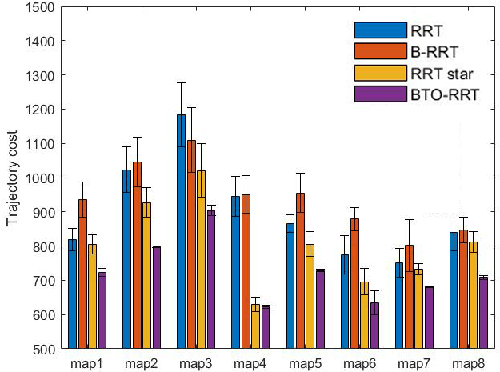
This paper explores a rapid, optimal smooth path-planning algorithm for robots (e.g., autonomous vehicles) in point cloud environments. Derivative maps such as dense point clouds, mesh maps, Octomaps, etc. are frequently used for path planning purposes. A bi-directional target-oriented point planning algorithm, directly using point clouds to compute the optimized and dynamically feasible trajectories, is presented in this paper. This approach searches for obstacle-free, low computational cost, smooth, and dynamically feasible paths by analyzing a point cloud of the target environment, using a modified bi-directional and RRT-connect-based path planning algorithm, with a k-d tree-based obstacle avoidance strategy and three-step optimization. This presented approach bypasses the common 3D map discretization, directly leveraging point cloud data and it can be separated into two parts: modified RRT-based algorithm core and the three-step optimization. Simulations on 8 2D maps with different configurations and characteristics are presented to show the efficiency and 2D performance of the proposed algorithm. Benchmark comparison and evaluation with other RRT-based algorithms like RRT, B-RRT, and RRT star are also shown in the paper. Finally, the proposed algorithm successfully achieved different levels of mission goals on three 3D point cloud maps with different densities. The whole simulation proves that not only can our algorithm achieves a better performance on 2D maps compared with other algorithms, but also it can handle different tasks(ground vehicles and UAV applications) on different 3D point cloud maps, which shows the high performance and robustness of the proposed algorithm. The algorithm is open-sourced at \url{https://github.com/zhz03/BTO-RRT}