 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSAFE: A Sparse Autoencoder-Based Framework for Robust Query Enrichment and Hallucination Mitigation in LLMs
Mar 04, 2025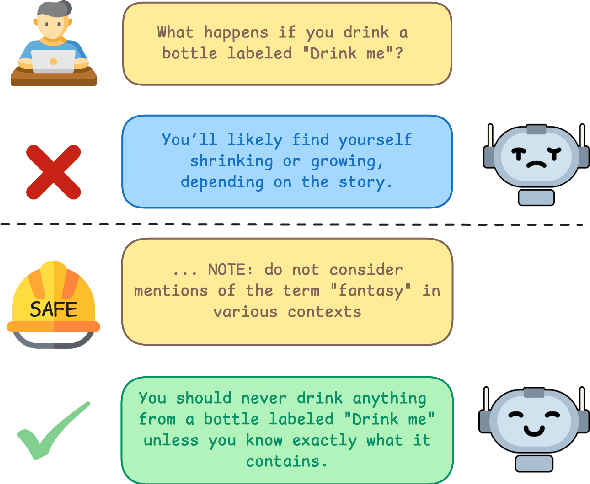

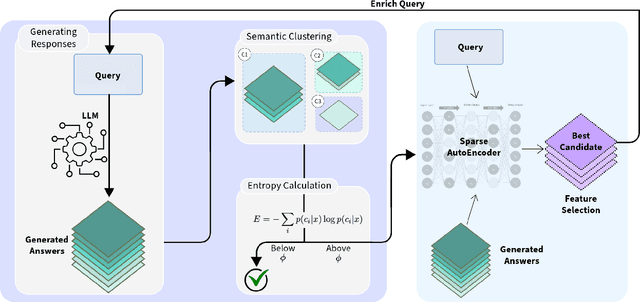

Despite the state-of-the-art performance of Large Language Models (LLMs), these models often suffer from hallucinations, which can undermine their performance in critical applications. In this work, we propose SAFE, a novel method for detecting and mitigating hallucinations by leveraging Sparse Autoencoders (SAEs). While hallucination detection techniques and SAEs have been explored independently, their synergistic application in a comprehensive system, particularly for hallucination-aware query enrichment, has not been fully investigated. To validate the effectiveness of SAFE, we evaluate it on two models with available SAEs across three diverse cross-domain datasets designed to assess hallucination problems. Empirical results demonstrate that SAFE consistently improves query generation accuracy and mitigates hallucinations across all datasets, achieving accuracy improvements of up to 29.45%.
Designing Role Vectors to Improve LLM Inference Behaviour
Feb 17, 2025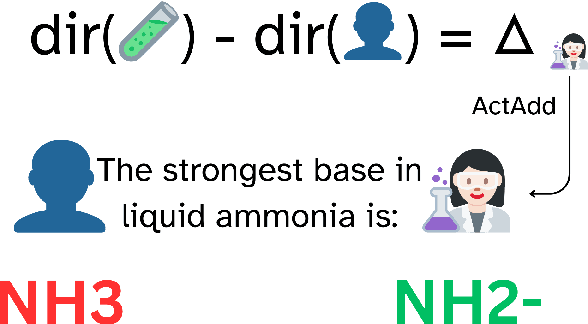
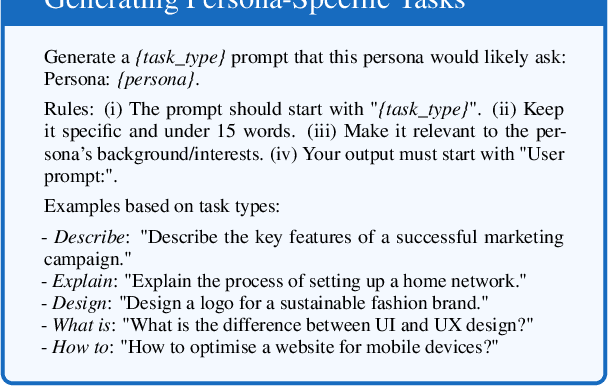
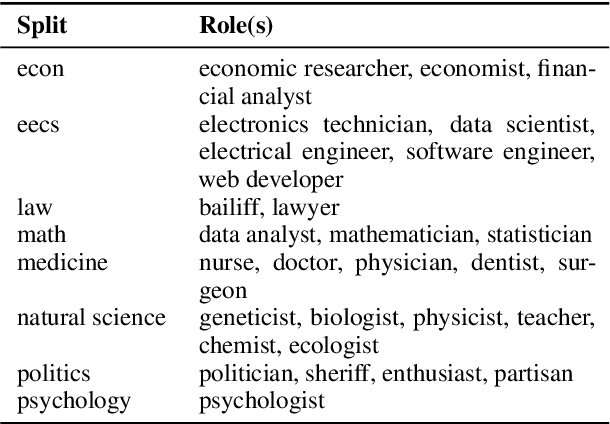
The influence of personas on Large Language Models (LLMs) has been widely studied, yet their direct impact on performance remains uncertain. This work explores a novel approach to guiding LLM behaviour through role vectors, an alternative to persona-based prompting. We construct 29 role vectors derived from model activations and evaluate their impact on benchmark performance across multiple domains. Our analysis investigates whether these vectors can effectively steer models toward domain-specific expertise. We measure two key interventions: (i) activation addition, which reinforces role-specific directions, and (ii) directional ablation, which removes them. Results on well-established benchmarks indicate that role vectors do, in fact, influence model behaviour, improving task performance in relevant domains while marginally affecting unrelated tasks. This, in turn, suggests that manipulating internal model representations has a greater impact on outcomes than persona-based prompting.
Towards the Terminator Economy: Assessing Job Exposure to AI through LLMs
Jul 27, 2024The spread and rapid development of AI-related technologies are influencing many aspects of our daily lives, from social to educational, including the labour market. Many researchers have been highlighting the key role AI and technologies play in reshaping jobs and their related tasks, either by automating or enhancing human capabilities in the workplace. Can we estimate if, and to what extent, jobs and related tasks are exposed to the risk of being automatized by state-of-the-art AI-related technologies? Our work tackles this question through a data-driven approach: (i) developing a reproducible framework that exploits a battery of open-source Large Language Models to assess current AI and robotics' capabilities in performing job-related tasks; (ii) formalising and computing an AI exposure measure by occupation, namely the teai (Task Exposure to AI) index. Our results show that about one-third of U.S. employment is highly exposed to AI, primarily in high-skill jobs (aka, white collars). This exposure correlates positively with employment and wage growth from 2019 to 2023, indicating a beneficial impact of AI on productivity. The source codes and results are publicly available, enabling the whole community to benchmark and track AI and technology capabilities over time.
XAI meets LLMs: A Survey of the Relation between Explainable AI and Large Language Models
Jul 21, 2024

In this survey, we address the key challenges in Large Language Models (LLM) research, focusing on the importance of interpretability. Driven by increasing interest from AI and business sectors, we highlight the need for transparency in LLMs. We examine the dual paths in current LLM research and eXplainable Artificial Intelligence (XAI): enhancing performance through XAI and the emerging focus on model interpretability. Our paper advocates for a balanced approach that values interpretability equally with functional advancements. Recognizing the rapid development in LLM research, our survey includes both peer-reviewed and preprint (arXiv) papers, offering a comprehensive overview of XAI's role in LLM research. We conclude by urging the research community to advance both LLM and XAI fields together.
Disce aut Deficere: Evaluating LLMs Proficiency on the INVALSI Italian Benchmark
Jun 25, 2024Recent advancements in Large Language Models (LLMs) have significantly enhanced their ability to generate and manipulate human language, highlighting their potential across various applications. Evaluating LLMs in languages other than English is crucial for ensuring their linguistic versatility, cultural relevance, and applicability in diverse global contexts, thus broadening their usability and effectiveness. We tackle this challenge by introducing a structured benchmark using the INVALSI tests, a set of well-established assessments designed to measure educational competencies across Italy. Our study makes three primary contributions: Firstly, we adapt the INVALSI benchmark for automated LLM evaluation, which involves rigorous adaptation of the test format to suit automated processing while retaining the essence of the original tests. Secondly, we provide a detailed assessment of current LLMs, offering a crucial reference point for the academic community. Finally, we visually compare the performance of these models against human results. Additionally, researchers are invited to submit their models for ongoing evaluation, ensuring the benchmark remains a current and valuable resource.
Resource-Optimal Planning For An Autonomous Planetary Vehicle
Jul 29, 2010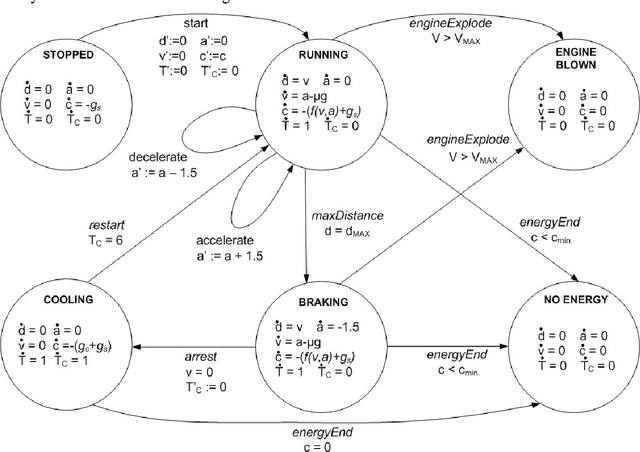
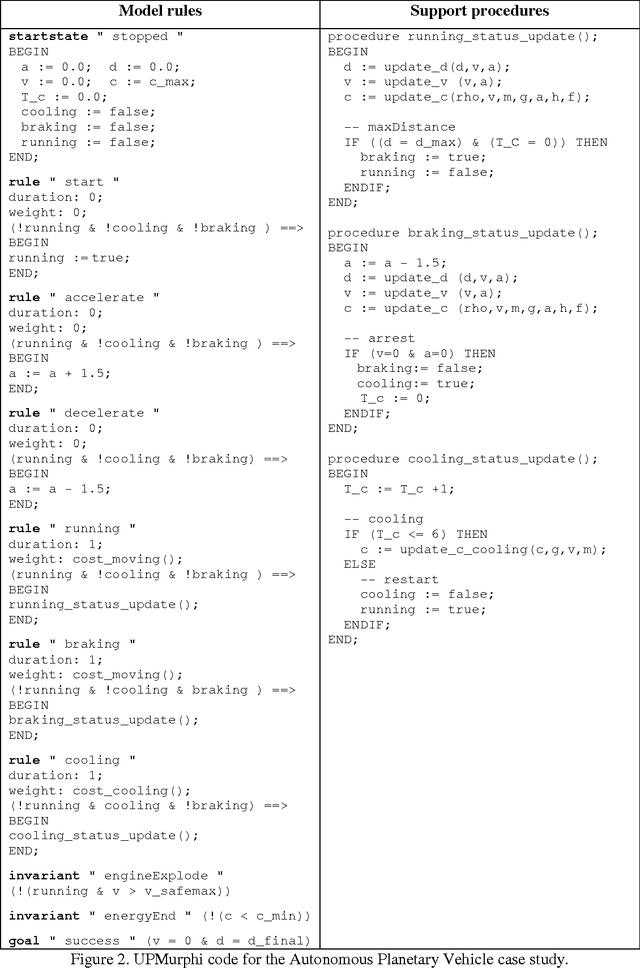
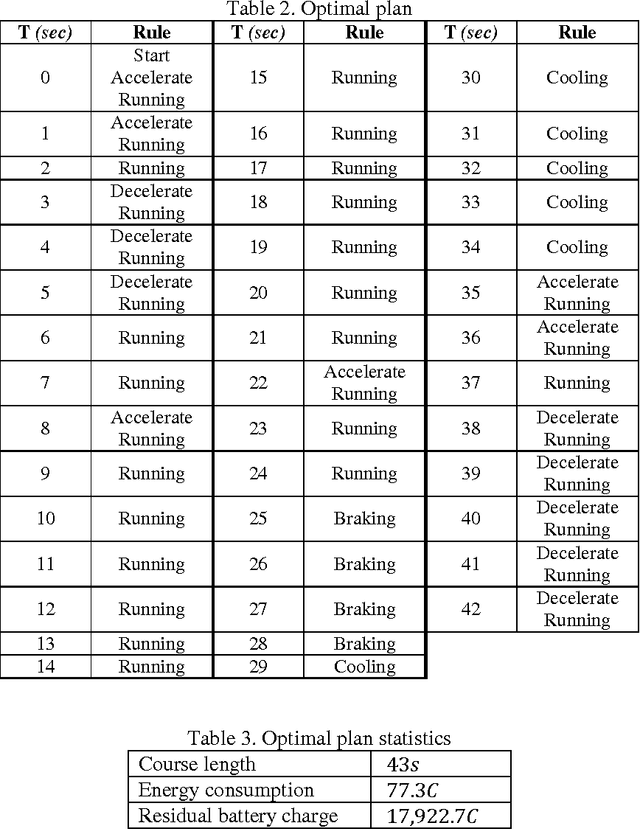
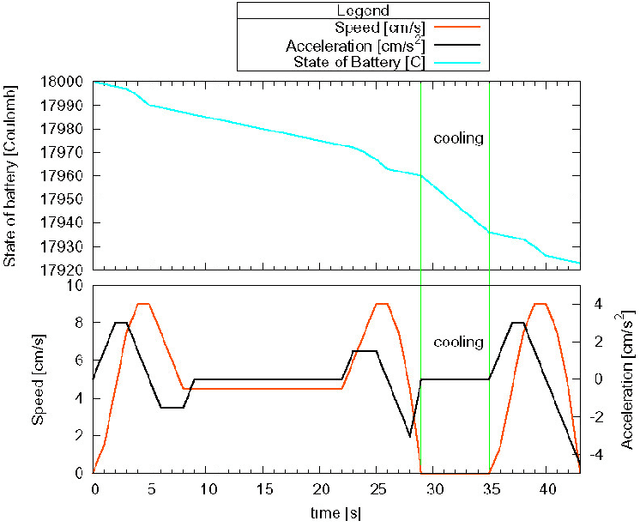
Autonomous planetary vehicles, also known as rovers, are small autonomous vehicles equipped with a variety of sensors used to perform exploration and experiments on a planet's surface. Rovers work in a partially unknown environment, with narrow energy/time/movement constraints and, typically, small computational resources that limit the complexity of on-line planning and scheduling, thus they represent a great challenge in the field of autonomous vehicles. Indeed, formal models for such vehicles usually involve hybrid systems with nonlinear dynamics, which are difficult to handle by most of the current planning algorithms and tools. Therefore, when offline planning of the vehicle activities is required, for example for rovers that operate without a continuous Earth supervision, such planning is often performed on simplified models that are not completely realistic. In this paper we show how the UPMurphi model checking based planning tool can be used to generate resource-optimal plans to control the engine of an autonomous planetary vehicle, working directly on its hybrid model and taking into account several safety constraints, thus achieving very accurate results.
* 15 pages, 4 figures