 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeResource-Optimal Planning For An Autonomous Planetary Vehicle
Jul 29, 2010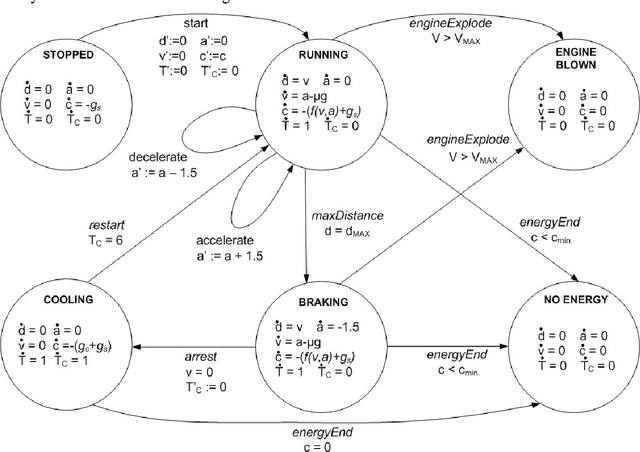
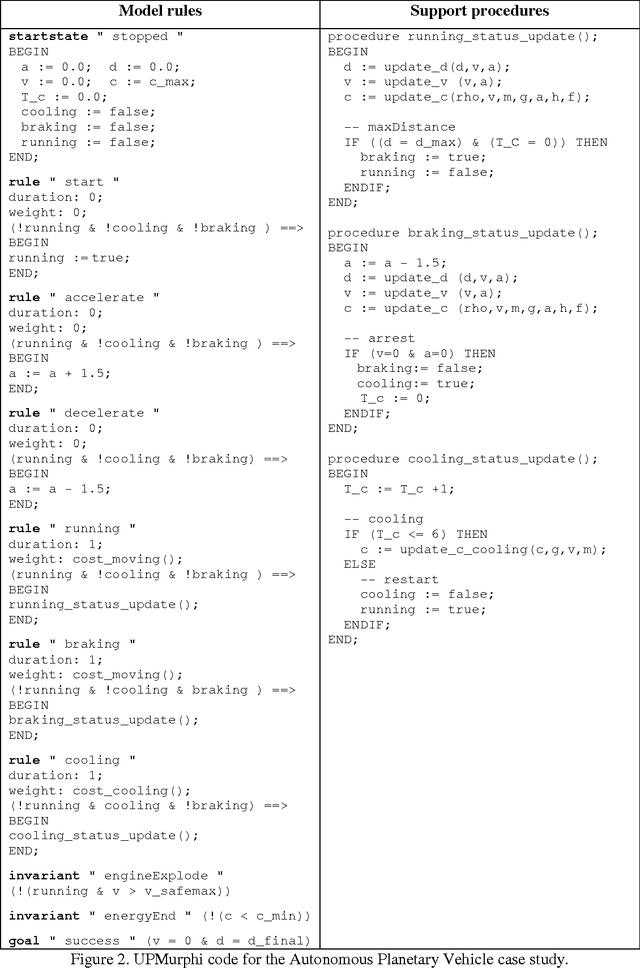
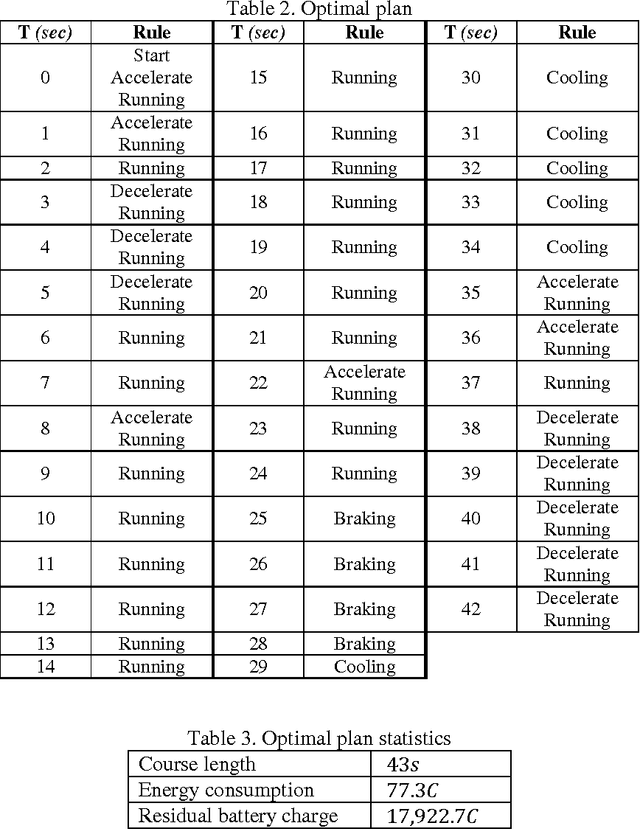
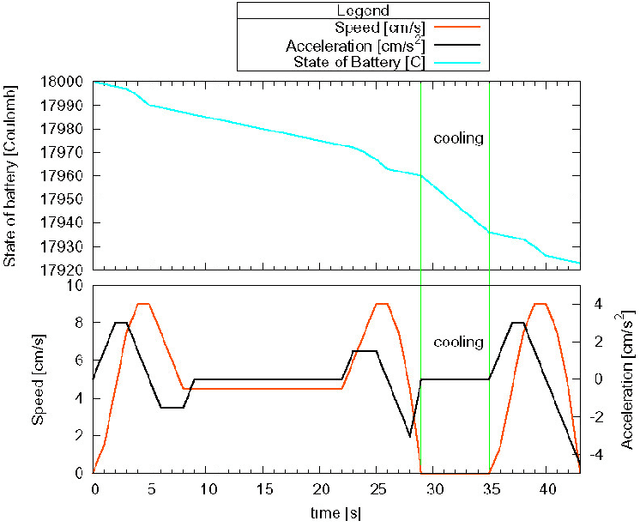
Autonomous planetary vehicles, also known as rovers, are small autonomous vehicles equipped with a variety of sensors used to perform exploration and experiments on a planet's surface. Rovers work in a partially unknown environment, with narrow energy/time/movement constraints and, typically, small computational resources that limit the complexity of on-line planning and scheduling, thus they represent a great challenge in the field of autonomous vehicles. Indeed, formal models for such vehicles usually involve hybrid systems with nonlinear dynamics, which are difficult to handle by most of the current planning algorithms and tools. Therefore, when offline planning of the vehicle activities is required, for example for rovers that operate without a continuous Earth supervision, such planning is often performed on simplified models that are not completely realistic. In this paper we show how the UPMurphi model checking based planning tool can be used to generate resource-optimal plans to control the engine of an autonomous planetary vehicle, working directly on its hybrid model and taking into account several safety constraints, thus achieving very accurate results.
* 15 pages, 4 figures