 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Graph Attention Learning Approach to Antenna Tilt Optimization
Dec 27, 2021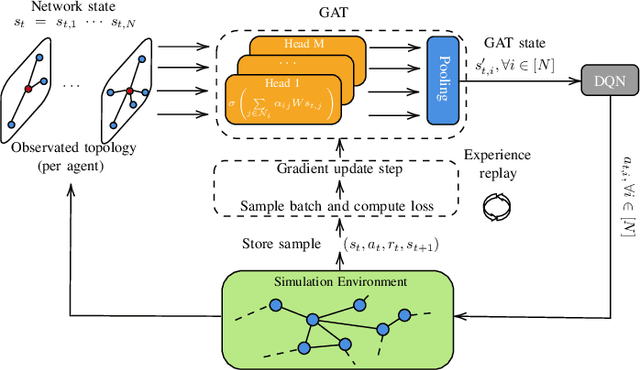
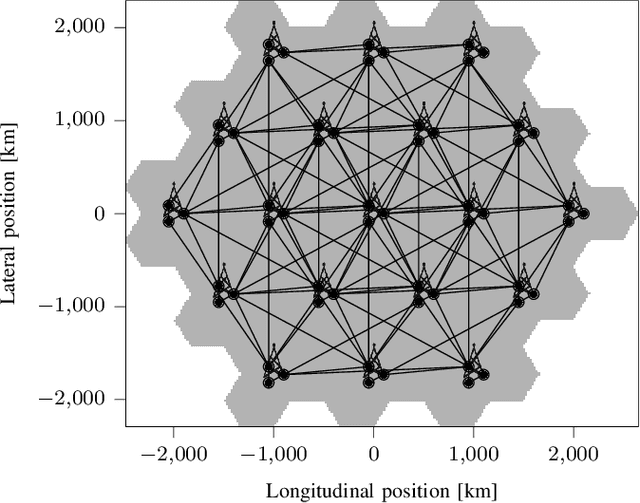
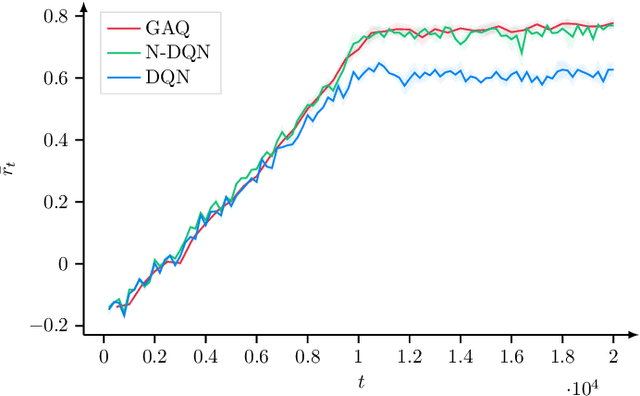

6G will move mobile networks towards increasing levels of complexity. To deal with this complexity, optimization of network parameters is key to ensure high performance and timely adaptivity to dynamic network environments. The optimization of the antenna tilt provides a practical and cost-efficient method to improve coverage and capacity in the network. Previous methods based on Reinforcement Learning (RL) have shown great promise for tilt optimization by learning adaptive policies outperforming traditional tilt optimization methods. However, most existing RL methods are based on single-cell features representation, which fails to fully characterize the agent state, resulting in suboptimal performance. Also, most of such methods lack scalability, due to state-action explosion, and generalization ability. In this paper, we propose a Graph Attention Q-learning (GAQ) algorithm for tilt optimization. GAQ relies on a graph attention mechanism to select relevant neighbors information, improve the agent state representation, and update the tilt control policy based on a history of observations using a Deep Q-Network (DQN). We show that GAQ efficiently captures important network information and outperforms standard DQN with local information by a large margin. In addition, we demonstrate its ability to generalize to network deployments of different sizes and densities.
Dynamic Clustering in Federated Learning
Dec 07, 2020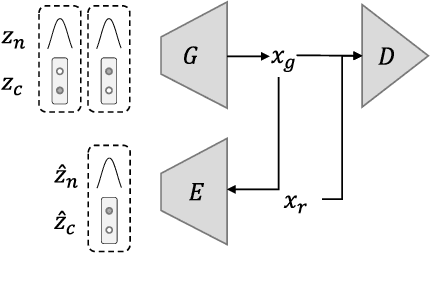
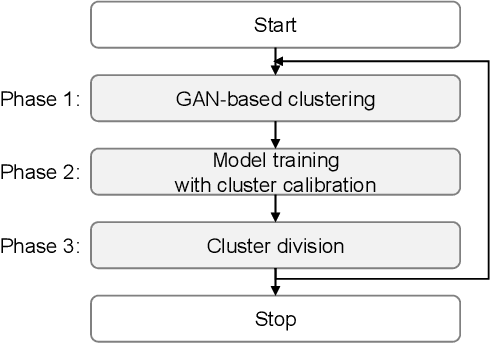
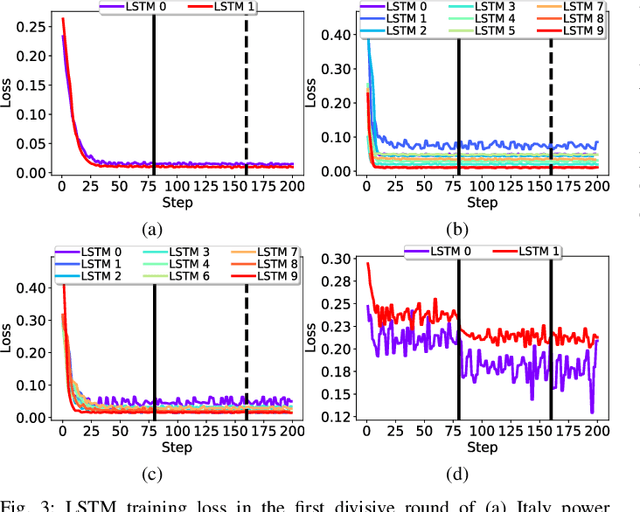
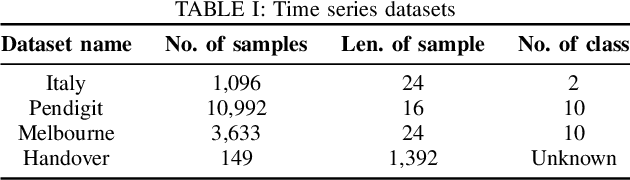
In the resource management of wireless networks, Federated Learning has been used to predict handovers. However, non-independent and identically distributed data degrade the accuracy performance of such predictions. To overcome the problem, Federated Learning can leverage data clustering algorithms and build a machine learning model for each cluster. However, traditional data clustering algorithms, when applied to the handover prediction, exhibit three main limitations: the risk of data privacy breach, the fixed shape of clusters, and the non-adaptive number of clusters. To overcome these limitations, in this paper, we propose a three-phased data clustering algorithm, namely: generative adversarial network-based clustering, cluster calibration, and cluster division. We show that the generative adversarial network-based clustering preserves privacy. The cluster calibration deals with dynamic environments by modifying clusters. Moreover, the divisive clustering explores the different number of clusters by repeatedly selecting and dividing a cluster into multiple clusters. A baseline algorithm and our algorithm are tested on a time series forecasting task. We show that our algorithm improves the performance of forecasting models, including cellular network handover, by 43%.
Safe Reinforcement Learning for Antenna Tilt Optimisation using Shielding and Multiple Baselines
Dec 02, 2020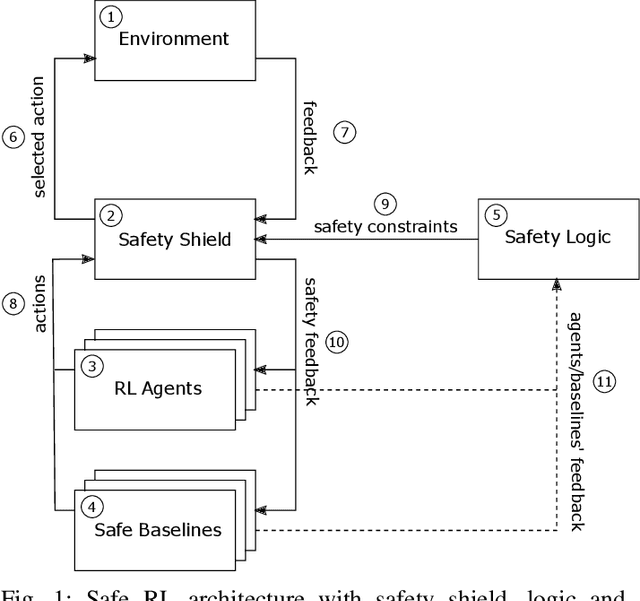
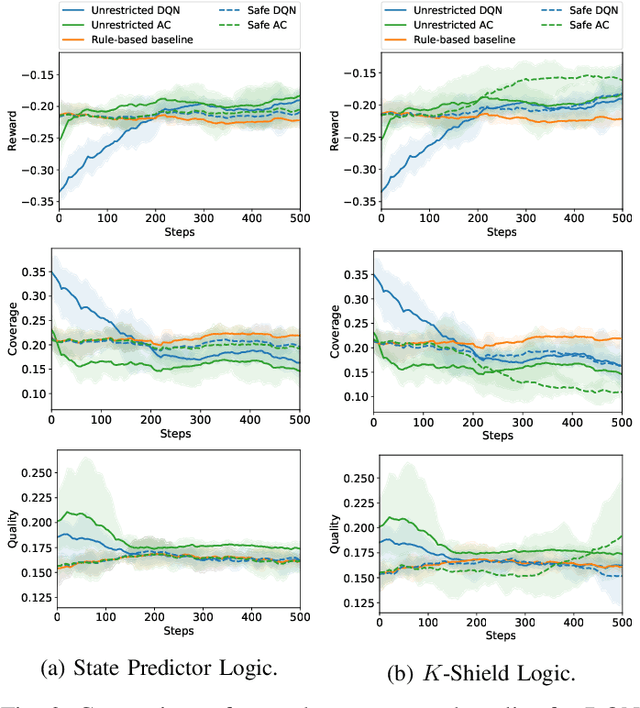
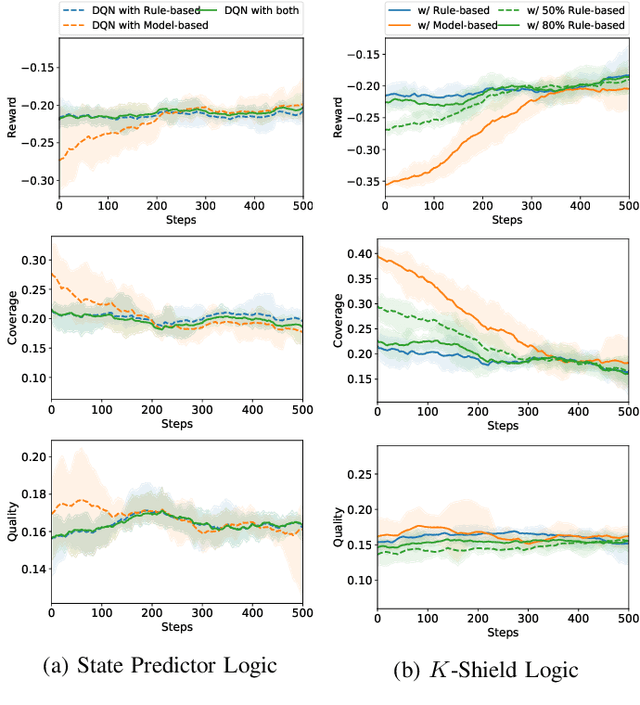

Safe interaction with the environment is one of the most challenging aspects of Reinforcement Learning (RL) when applied to real-world problems. This is particularly important when unsafe actions have a high or irreversible negative impact on the environment. In the context of network management operations, Remote Electrical Tilt (RET) optimisation is a safety-critical application in which exploratory modifications of antenna tilt angles of Base Stations (BSs) can cause significant performance degradation in the network. In this paper, we propose a modular Safe Reinforcement Learning (SRL) architecture which is then used to address the RET optimisation in cellular networks. In this approach, a safety shield continuously benchmarks the performance of RL agents against safe baselines, and determines safe antenna tilt updates to be performed on the network. Our results demonstrate improved performance of the SRL agent over the baseline while ensuring the safety of the performed actions.
Remote Electrical Tilt Optimization via Safe Reinforcement Learning
Oct 12, 2020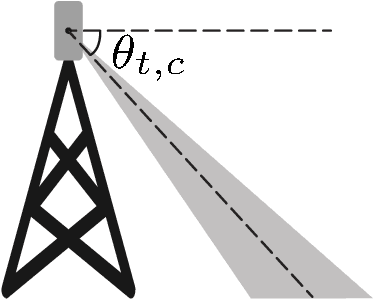
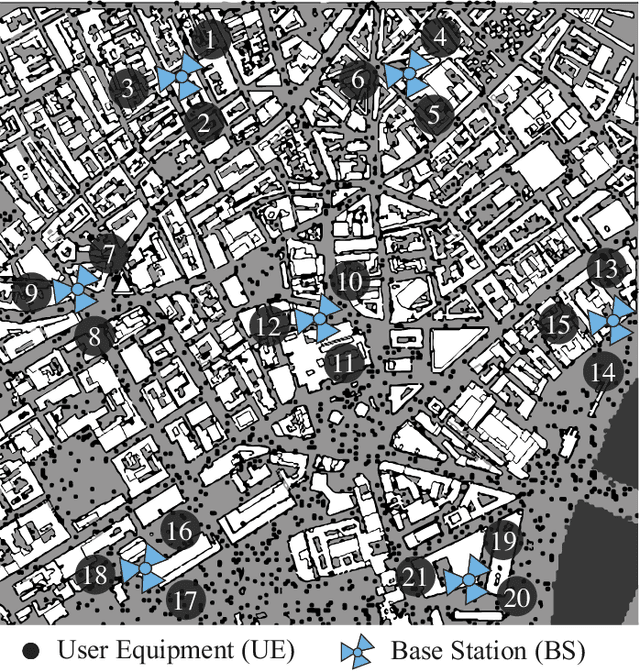
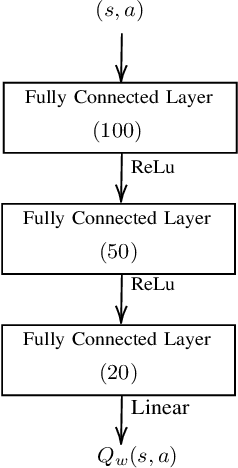
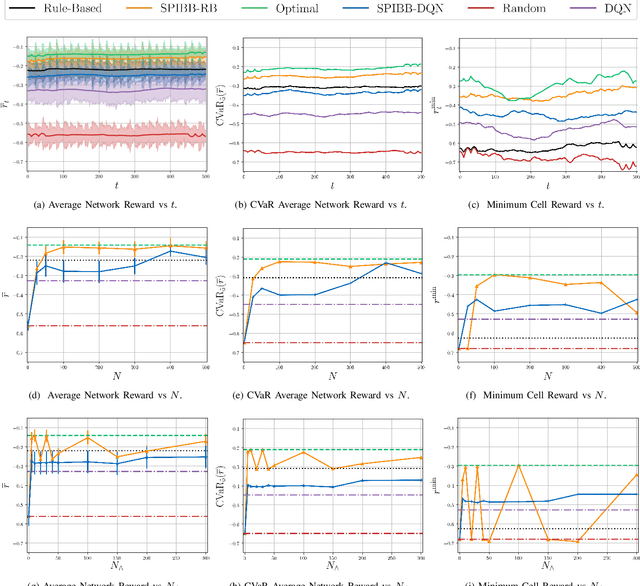
Remote Electrical Tilt (RET) optimization is an efficient method for adjusting the vertical tilt angle of Base Stations (BSs) antennas in order to optimize Key Performance Indicators (KPIs) of the network. Reinforcement Learning (RL) provides a powerful framework for RET optimization because of its self-learning capabilities and adaptivity to environmental changes. However, an RL agent may execute unsafe actions during the course of its interaction, i.e., actions resulting in undesired network performance degradation. Since the reliability of services is critical for Mobile Network Operators (MNOs), the prospect of performance degradation has prohibited the real-world deployment of RL methods for RET optimization. In this work, we model the RET optimization problem in the Safe Reinforcement Learning (SRL) framework with the goal of learning a tilt control strategy providing performance improvement guarantees with respect to a safe baseline. We leverage a recent SRL method, namely Safe Policy Improvement through Baseline Bootstrapping (SPIBB), to learn an improved policy from an offline dataset of interactions collected by the safe baseline. Our experiments show that the proposed approach is able to learn a safe and improved tilt update policy, providing a higher degree of reliability and potential for real-world network deployment.