 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"A Good Bot Always Knows Its Limitations": Assessing Autonomous System Decision-making Competencies through Factorized Machine Self-confidence
Jul 29, 2024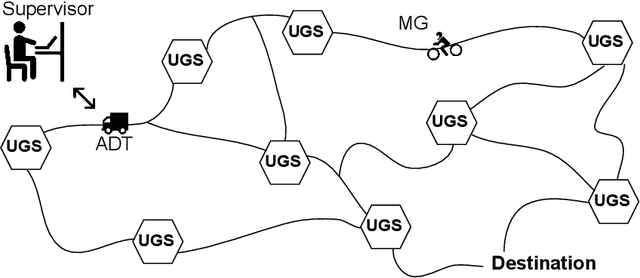
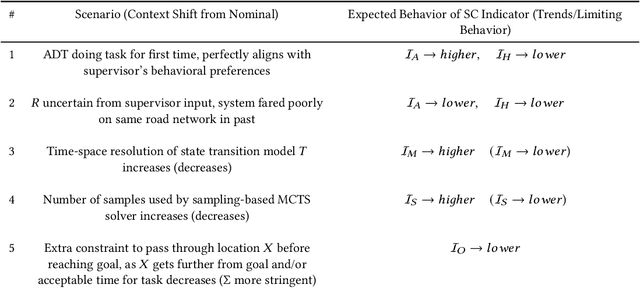
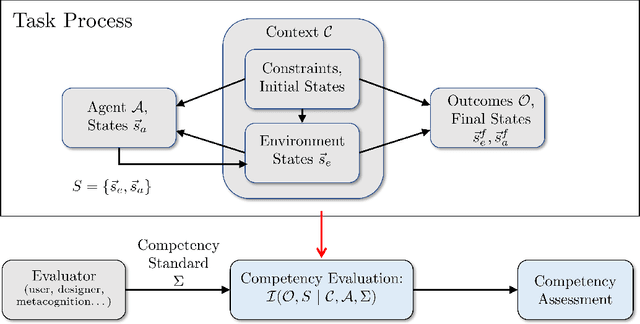
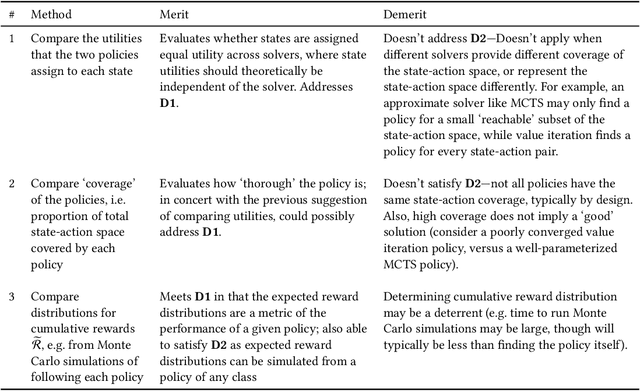
How can intelligent machines assess their competencies in completing tasks? This question has come into focus for autonomous systems that algorithmically reason and make decisions under uncertainty. It is argued here that machine self-confidence -- a form of meta-reasoning based on self-assessments of an agent's knowledge about the state of the world and itself, as well as its ability to reason about and execute tasks -- leads to many eminently computable and useful competency indicators for such agents. This paper presents a culmination of work on this concept in the form of a computational framework called Factorized Machine Self-confidence (FaMSeC), which provides an engineering-focused holistic description of factors driving an algorithmic decision-making process, including outcome assessment, solver quality, model quality, alignment quality, and past experience. In FaMSeC, self-confidence indicators are derived from hierarchical `problem-solving statistics' embedded within broad classes of probabilistic decision-making algorithms such as Markov decision processes. The problem-solving statistics are obtained by evaluating and grading probabilistic exceedance margins with respect to given competency standards, which are specified for each decision-making competency factor by the informee (e.g. a non-expert user or an expert system designer). This approach allows `algorithmic goodness of fit' evaluations to be easily incorporated into the design of many kinds of autonomous agents via human-interpretable competency self-assessment reports. Detailed descriptions and running application examples for a Markov decision process agent show how two FaMSeC factors (outcome assessment and solver quality) can be practically computed and reported for a range of possible tasking contexts through novel use of meta-utility functions, behavior simulations, and surrogate prediction models.
Flexible Supervised Autonomy for Exploration in Subterranean Environments
Jan 02, 2023



While the capabilities of autonomous systems have been steadily improving in recent years, these systems still struggle to rapidly explore previously unknown environments without the aid of GPS-assisted navigation. The DARPA Subterranean (SubT) Challenge aimed to fast track the development of autonomous exploration systems by evaluating their performance in real-world underground search-and-rescue scenarios. Subterranean environments present a plethora of challenges for robotic systems, such as limited communications, complex topology, visually-degraded sensing, and harsh terrain. The presented solution enables long-term autonomy with minimal human supervision by combining a powerful and independent single-agent autonomy stack, with higher level mission management operating over a flexible mesh network. The autonomy suite deployed on quadruped and wheeled robots was fully independent, freeing the human supervision to loosely supervise the mission and make high-impact strategic decisions. We also discuss lessons learned from fielding our system at the SubT Final Event, relating to vehicle versatility, system adaptability, and re-configurable communications.
Multi-Agent Autonomy: Advancements and Challenges in Subterranean Exploration
Oct 08, 2021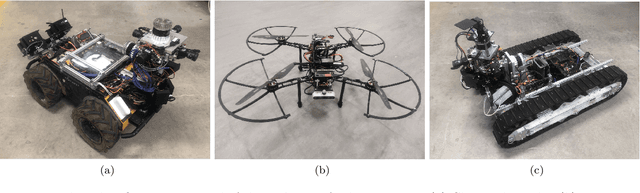
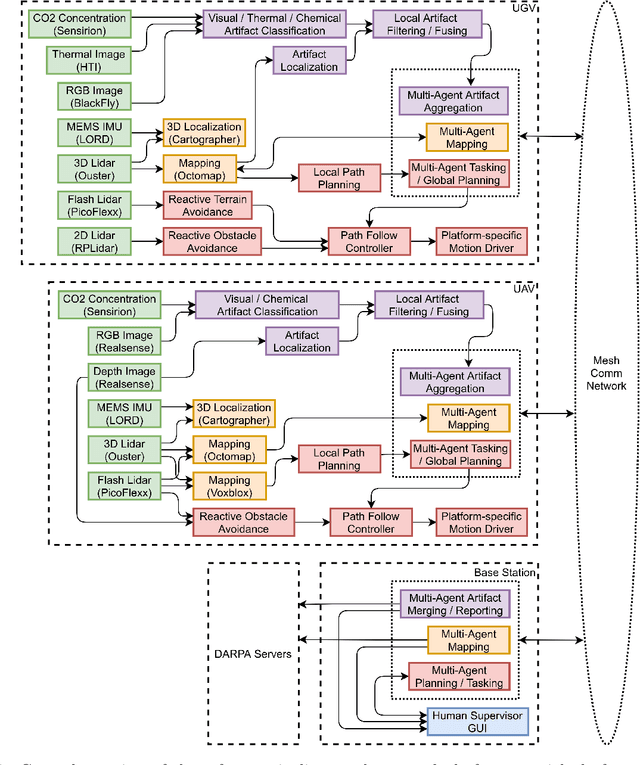
Artificial intelligence has undergone immense growth and maturation in recent years, though autonomous systems have traditionally struggled when fielded in diverse and previously unknown environments. DARPA is seeking to change that with the Subterranean Challenge, by providing roboticists the opportunity to support civilian and military first responders in complex and high-risk underground scenarios. The subterranean domain presents a handful of challenges, such as limited communication, diverse topology and terrain, and degraded sensing. Team MARBLE proposes a solution for autonomous exploration of unknown subterranean environments in which coordinated agents search for artifacts of interest. The team presents two navigation algorithms in the form of a metric-topological graph-based planner and a continuous frontier-based planner. To facilitate multi-agent coordination, agents share and merge new map information and candidate goal-points. Agents deploy communication beacons at different points in the environment, extending the range at which maps and other information can be shared. Onboard autonomy reduces the load on human supervisors, allowing agents to detect and localize artifacts and explore autonomously outside established communication networks. Given the scale, complexity, and tempo of this challenge, a range of lessons were learned, most importantly, that frequent and comprehensive field testing in representative environments is key to rapidly refining system performance.
3D Reactive Control and Frontier-Based Exploration for Unstructured Environments
Aug 01, 2021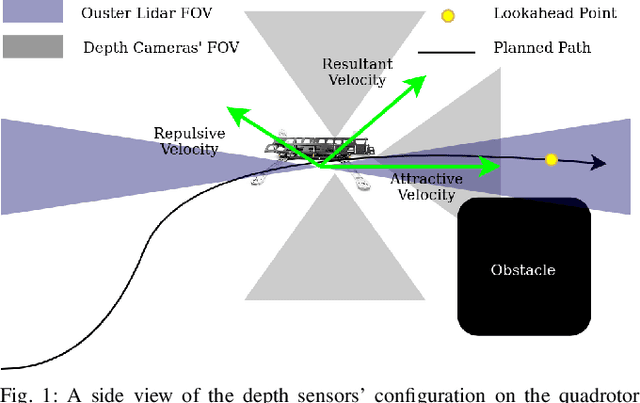
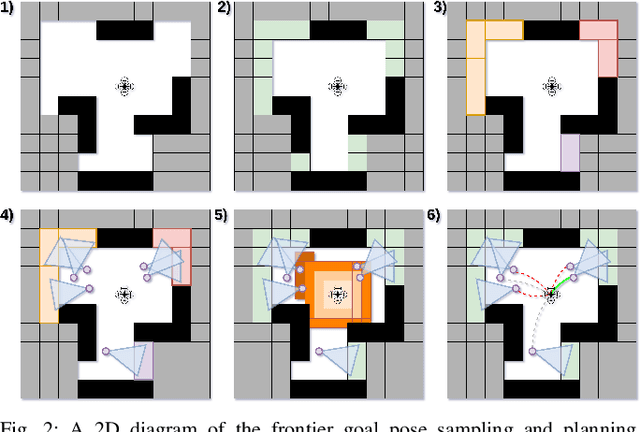
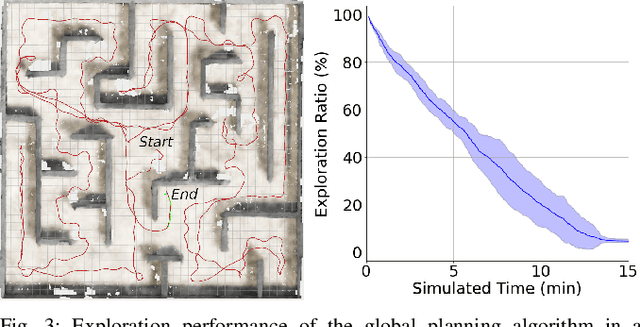

The paper proposes a reliable and robust planning solution to the long range robotic navigation problem in extremely cluttered environments. A two-layer planning architecture is proposed that leverages both the environment map and the direct depth sensor information to ensure maximal information gain out of the onboard sensors. A frontier-based pose sampling technique is used with a fast marching cost-to-go calculation to select a goal pose and plan a path to maximize robot exploration rate. An artificial potential function approach, relying on direct depth measurements, enables the robot to follow the path while simultaneously avoiding small scene obstacles that are not captured in the map due to mapping and localization uncertainties. We demonstrate the feasibility and robustness of the proposed approach through field deployments in a structurally complex warehouse using a micro-aerial vehicle (MAV) with all the sensing and computations performed onboard.