 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Agent Autonomy: Advancements and Challenges in Subterranean Exploration
Oct 08, 2021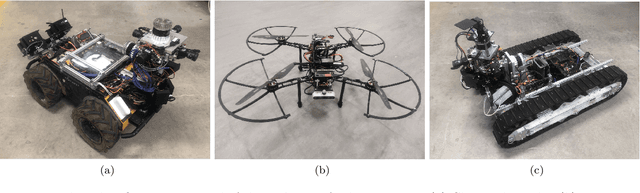
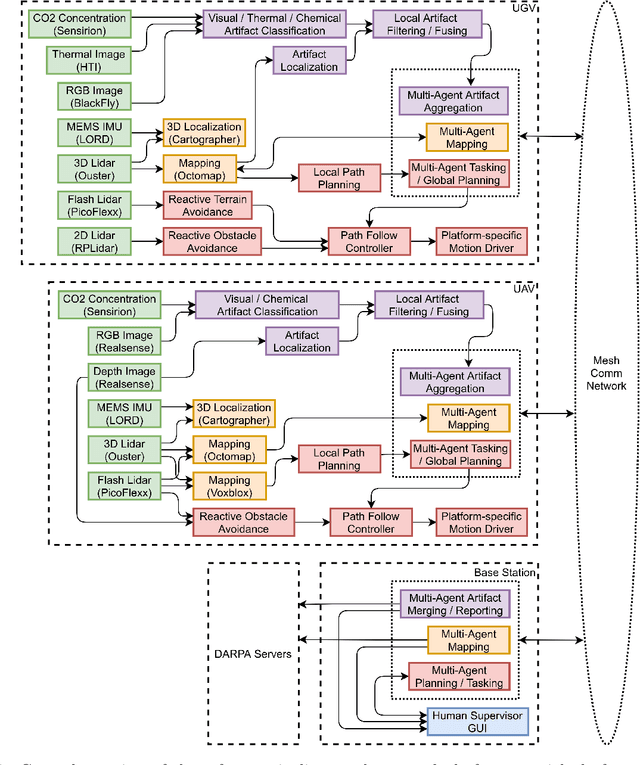
Artificial intelligence has undergone immense growth and maturation in recent years, though autonomous systems have traditionally struggled when fielded in diverse and previously unknown environments. DARPA is seeking to change that with the Subterranean Challenge, by providing roboticists the opportunity to support civilian and military first responders in complex and high-risk underground scenarios. The subterranean domain presents a handful of challenges, such as limited communication, diverse topology and terrain, and degraded sensing. Team MARBLE proposes a solution for autonomous exploration of unknown subterranean environments in which coordinated agents search for artifacts of interest. The team presents two navigation algorithms in the form of a metric-topological graph-based planner and a continuous frontier-based planner. To facilitate multi-agent coordination, agents share and merge new map information and candidate goal-points. Agents deploy communication beacons at different points in the environment, extending the range at which maps and other information can be shared. Onboard autonomy reduces the load on human supervisors, allowing agents to detect and localize artifacts and explore autonomously outside established communication networks. Given the scale, complexity, and tempo of this challenge, a range of lessons were learned, most importantly, that frequent and comprehensive field testing in representative environments is key to rapidly refining system performance.
3D Reactive Control and Frontier-Based Exploration for Unstructured Environments
Aug 01, 2021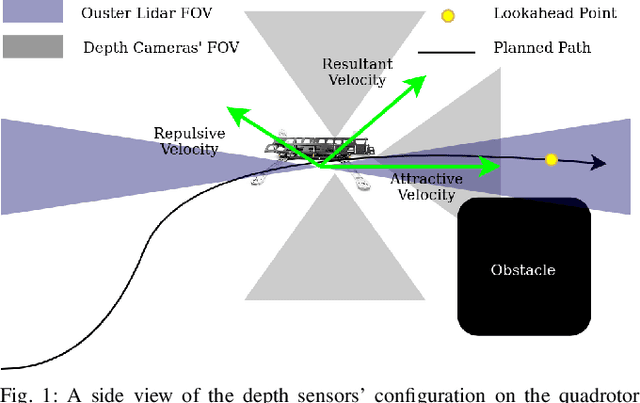
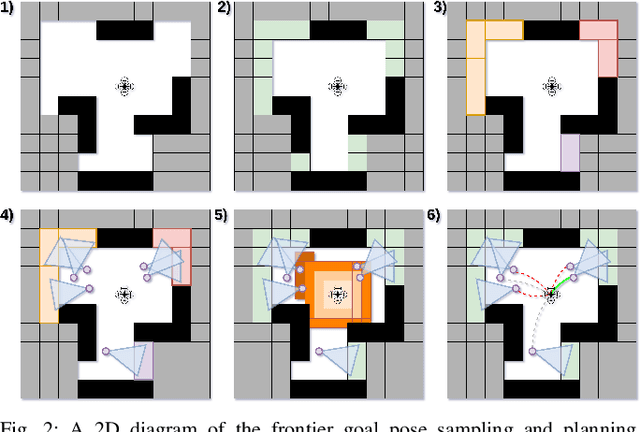
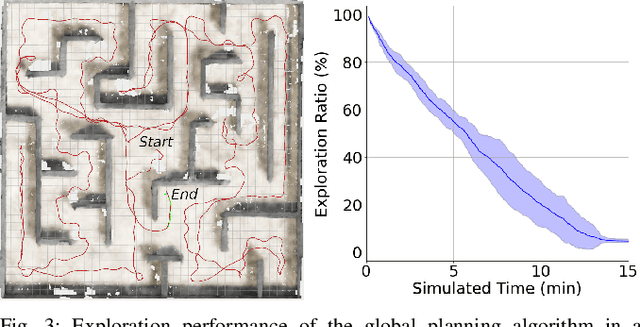

The paper proposes a reliable and robust planning solution to the long range robotic navigation problem in extremely cluttered environments. A two-layer planning architecture is proposed that leverages both the environment map and the direct depth sensor information to ensure maximal information gain out of the onboard sensors. A frontier-based pose sampling technique is used with a fast marching cost-to-go calculation to select a goal pose and plan a path to maximize robot exploration rate. An artificial potential function approach, relying on direct depth measurements, enables the robot to follow the path while simultaneously avoiding small scene obstacles that are not captured in the map due to mapping and localization uncertainties. We demonstrate the feasibility and robustness of the proposed approach through field deployments in a structurally complex warehouse using a micro-aerial vehicle (MAV) with all the sensing and computations performed onboard.