 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNonlocal Retinex-Based Variational Model and its Deep Unfolding Twin for Low-Light Image Enhancement
Apr 10, 2025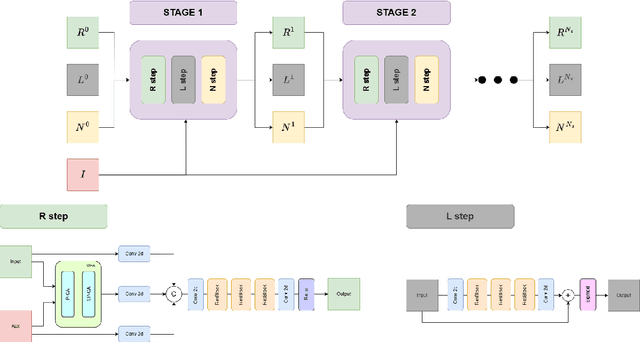



Images captured under low-light conditions present significant limitations in many applications, as poor lighting can obscure details, reduce contrast, and hide noise. Removing the illumination effects and enhancing the quality of such images is crucial for many tasks, such as image segmentation and object detection. In this paper, we propose a variational method for low-light image enhancement based on the Retinex decomposition into illumination, reflectance, and noise components. A color correction pre-processing step is applied to the low-light image, which is then used as the observed input in the decomposition. Moreover, our model integrates a novel nonlocal gradient-type fidelity term designed to preserve structural details. Additionally, we propose an automatic gamma correction module. Building on the proposed variational approach, we extend the model by introducing its deep unfolding counterpart, in which the proximal operators are replaced with learnable networks. We propose cross-attention mechanisms to capture long-range dependencies in both the nonlocal prior of the reflectance and the nonlocal gradient-based constraint. Experimental results demonstrate that both methods compare favorably with several recent and state-of-the-art techniques across different datasets. In particular, despite not relying on learning strategies, the variational model outperforms most deep learning approaches both visually and in terms of quality metrics.
Flexible Supervised Autonomy for Exploration in Subterranean Environments
Jan 02, 2023



While the capabilities of autonomous systems have been steadily improving in recent years, these systems still struggle to rapidly explore previously unknown environments without the aid of GPS-assisted navigation. The DARPA Subterranean (SubT) Challenge aimed to fast track the development of autonomous exploration systems by evaluating their performance in real-world underground search-and-rescue scenarios. Subterranean environments present a plethora of challenges for robotic systems, such as limited communications, complex topology, visually-degraded sensing, and harsh terrain. The presented solution enables long-term autonomy with minimal human supervision by combining a powerful and independent single-agent autonomy stack, with higher level mission management operating over a flexible mesh network. The autonomy suite deployed on quadruped and wheeled robots was fully independent, freeing the human supervision to loosely supervise the mission and make high-impact strategic decisions. We also discuss lessons learned from fielding our system at the SubT Final Event, relating to vehicle versatility, system adaptability, and re-configurable communications.