 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmbodied Intelligence: The Key to Unblocking Generalized Artificial Intelligence
May 11, 2025The ultimate goal of artificial intelligence (AI) is to achieve Artificial General Intelligence (AGI). Embodied Artificial Intelligence (EAI), which involves intelligent systems with physical presence and real-time interaction with the environment, has emerged as a key research direction in pursuit of AGI. While advancements in deep learning, reinforcement learning, large-scale language models, and multimodal technologies have significantly contributed to the progress of EAI, most existing reviews focus on specific technologies or applications. A systematic overview, particularly one that explores the direct connection between EAI and AGI, remains scarce. This paper examines EAI as a foundational approach to AGI, systematically analyzing its four core modules: perception, intelligent decision-making, action, and feedback. We provide a detailed discussion of how each module contributes to the six core principles of AGI. Additionally, we discuss future trends, challenges, and research directions in EAI, emphasizing its potential as a cornerstone for AGI development. Our findings suggest that EAI's integration of dynamic learning and real-world interaction is essential for bridging the gap between narrow AI and AGI.
USTC FLICAR: A Multisensor Fusion Dataset of LiDAR-Inertial-Camera for Heavy-duty Autonomous Aerial Work Robots
Apr 04, 2023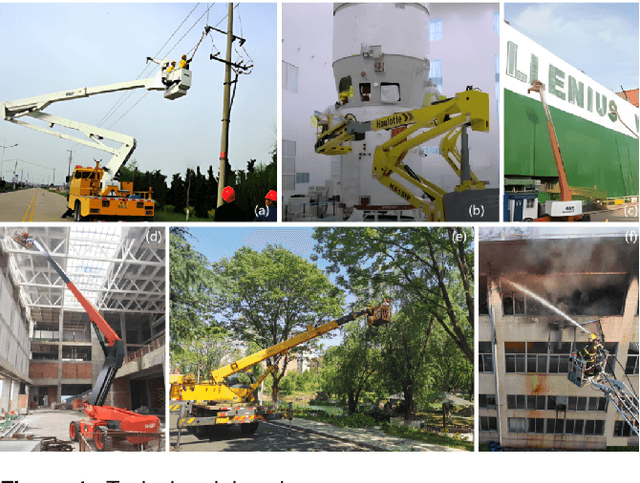
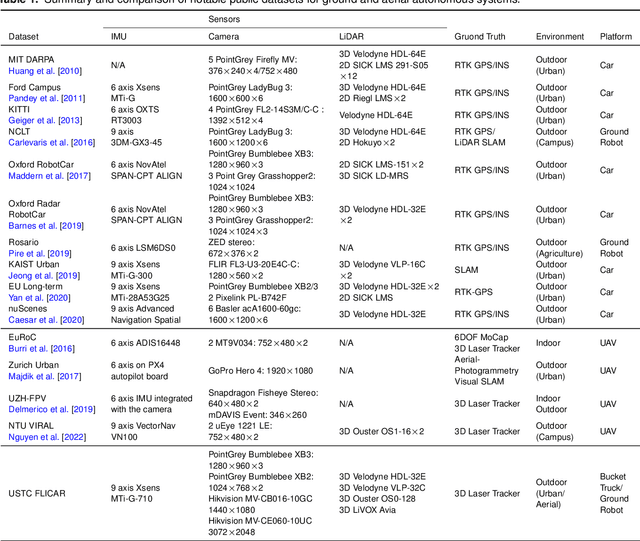
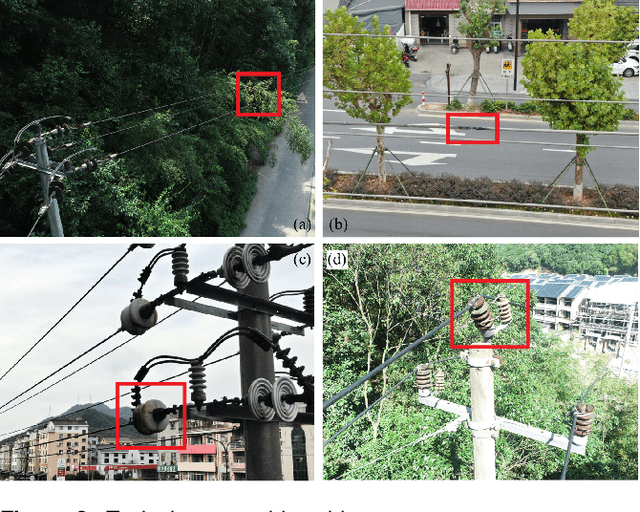
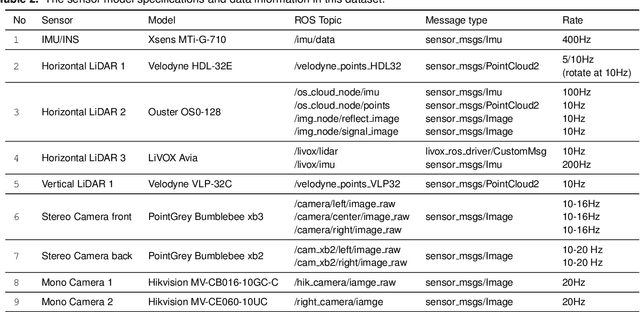
In this paper, we present the USTC FLICAR Dataset, which is dedicated to the development of simultaneous localization and mapping and precise 3D reconstruction of the workspace for heavy-duty autonomous aerial work robots. In recent years, numerous public datasets have played significant roles in the advancement of autonomous cars and unmanned aerial vehicles (UAVs). However, these two platforms differ from aerial work robots: UAVs are limited in their payload capacity, while cars are restricted to two-dimensional movements. To fill this gap, we create the Giraffe mapping robot based on a bucket truck, which is equipped with a variety of well-calibrated and synchronized sensors: four 3D LiDARs, two stereo cameras, two monocular cameras, Inertial Measurement Units (IMUs), and a GNSS/INS system. A laser tracker is used to record the millimeter-level ground truth positions. We also make its ground twin, the Okapi mapping robot, to gather data for comparison. The proposed dataset extends the typical autonomous driving sensing suite to aerial scenes. Therefore, the dataset is named FLICAR to denote flying cars. We believe this dataset can also represent the flying car scenarios, specifically the takeoff and landing of VTOL (Vertical Takeoff and Landing) flying cars. The dataset is available for download at: https://ustc-flicar.github.io.