 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Invariant Subspaces of Koopman Operators--Part 2: Heterogeneous Dictionary Mixing to Approximate Subspace Invariance
Dec 14, 2022This work builds on the models and concepts presented in part 1 to learn approximate dictionary representations of Koopman operators from data. Part I of this paper presented a methodology for arguing the subspace invariance of a Koopman dictionary. This methodology was demonstrated on the state-inclusive logistic lifting (SILL) basis. This is an affine basis augmented with conjunctive logistic functions. The SILL dictionary's nonlinear functions are homogeneous, a norm in data-driven dictionary learning of Koopman operators. In this paper, we discover that structured mixing of heterogeneous dictionary functions drawn from different classes of nonlinear functions achieve the same accuracy and dimensional scaling as the deep-learning-based deepDMD algorithm. We specifically show this by building a heterogeneous dictionary comprised of SILL functions and conjunctive radial basis functions (RBFs). This mixed dictionary achieves the same accuracy and dimensional scaling as deepDMD with an order of magnitude reduction in parameters, while maintaining geometric interpretability. These results strengthen the viability of dictionary-based Koopman models to solving high-dimensional nonlinear learning problems.
Learning Invariant Subspaces of Koopman Operators--Part 1: A Methodology for Demonstrating a Dictionary's Approximate Subspace Invariance
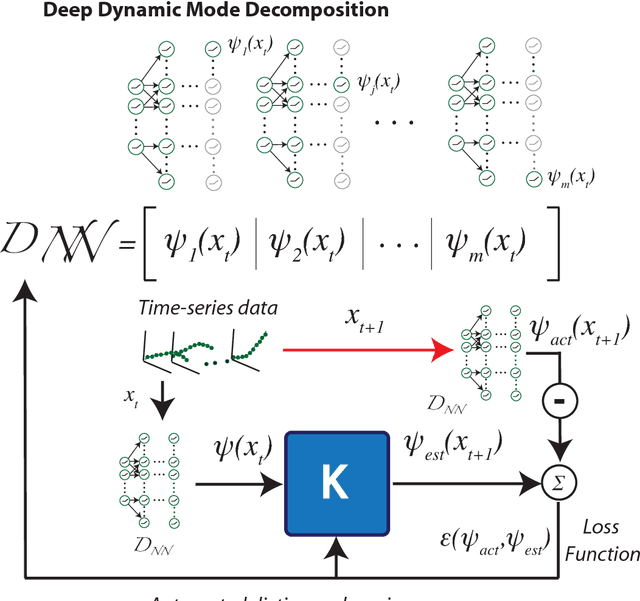
Dec 14, 2022Koopman operators model nonlinear dynamics as a linear dynamic system acting on a nonlinear function as the state. This nonstandard state is often called a Koopman observable and is usually approximated numerically by a superposition of functions drawn from a dictionary. In a widely used algorithm, Extended Dynamic Mode Decomposition, the dictionary functions are drawn from a fixed class of functions. Recently, deep learning combined with EDMD has been used to learn novel dictionary functions in an algorithm called deep dynamic mode decomposition (deepDMD). The learned representation both (1) accurately models and (2) scales well with the dimension of the original nonlinear system. In this paper we analyze the learned dictionaries from deepDMD and explore the theoretical basis for their strong performance. We explore State-Inclusive Logistic Lifting (SILL) dictionary functions to approximate Koopman observables. Error analysis of these dictionary functions show they satisfy a property of subspace approximation, which we define as uniform finite approximate closure. Our results provide a hypothesis to explain the success of deep neural networks in learning numerical approximations to Koopman operators. Part 2 of this paper will extend this explanation by demonstrating the subspace invariant of heterogeneous dictionaries and presenting a head-to-head numerical comparison of deepDMD and low-parameter heterogeneous dictionary learning.
Heterogeneous mixtures of dictionary functions to approximate subspace invariance in Koopman operators
Jun 27, 2022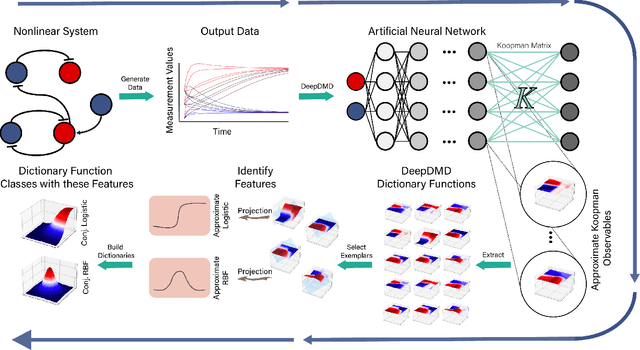
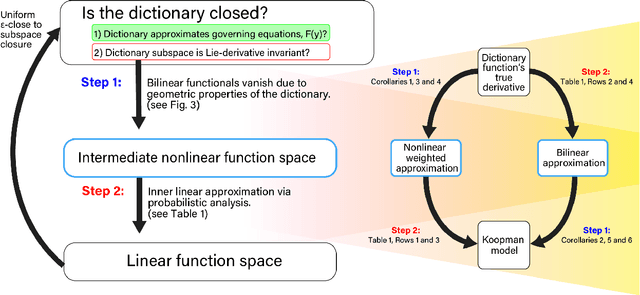
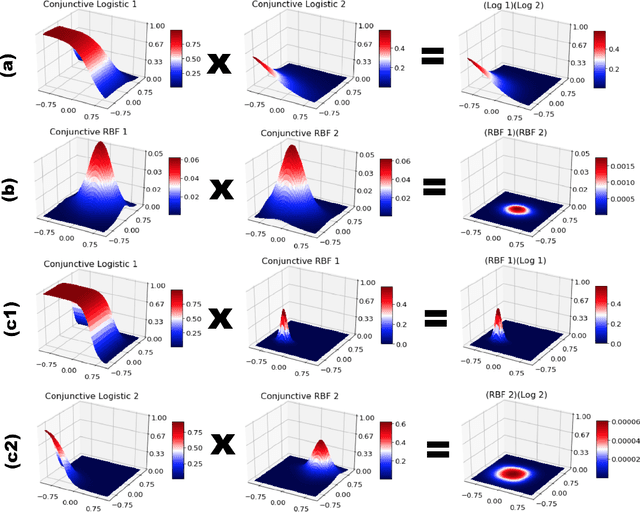
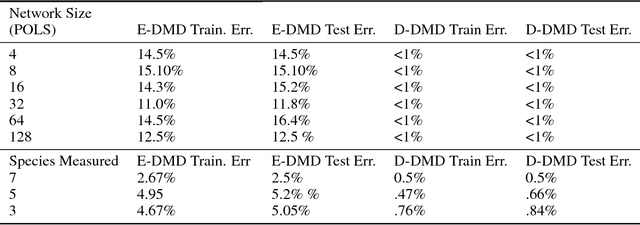
Koopman operators model nonlinear dynamics as a linear dynamic system acting on a nonlinear function as the state. This nonstandard state is often called a Koopman observable and is usually approximated numerically by a superposition of functions drawn from a \textit{dictionary}. A widely used algorithm, is \textit{Extended Dynamic Mode Decomposition}, where the dictionary functions are drawn from a fixed, homogeneous class of functions. Recently, deep learning combined with EDMD has been used to learn novel dictionary functions in an algorithm called deep dynamic mode decomposition (deepDMD). The learned representation both (1) accurately models and (2) scales well with the dimension of the original nonlinear system. In this paper we analyze the learned dictionaries from deepDMD and explore the theoretical basis for their strong performance. We discover a novel class of dictionary functions to approximate Koopman observables. Error analysis of these dictionary functions show they satisfy a property of subspace approximation, which we define as uniform finite approximate closure. We discover that structured mixing of heterogeneous dictionary functions drawn from different classes of nonlinear functions achieve the same accuracy and dimensional scaling as deepDMD. This mixed dictionary does so with an order of magnitude reduction in parameters, while maintaining geometric interpretability. Our results provide a hypothesis to explain the success of deep neural networks in learning numerical approximations to Koopman operators.
Towards Scalable Koopman Operator Learning: Convergence Rates and A Distributed Learning Algorithm
Sep 30, 2019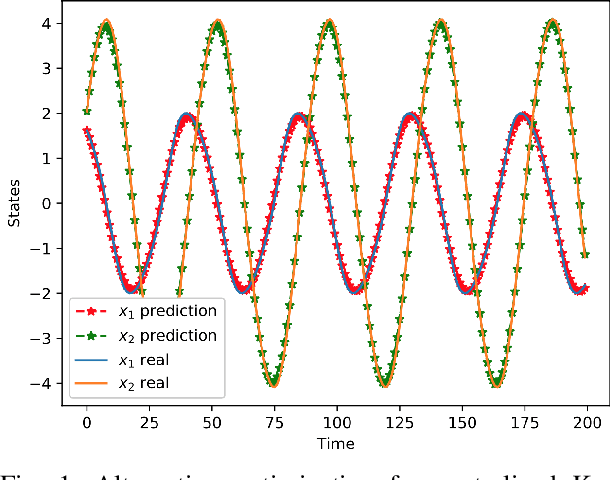
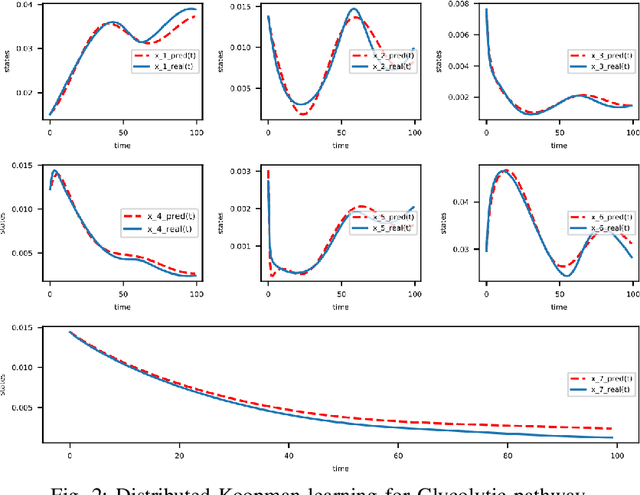
In this paper, we propose an alternating optimization algorithm to the nonconvex Koopman operator learning problem for nonlinear dynamic systems. We show that the proposed algorithm will converge to a critical point with rate $O(1/T)$ or $O(\frac{1}{\log T})$ under some mild assumptions. To handle the high dimensional nonlinear dynamical systems, we present the first-ever distributed Koopman operator learning algorithm. We show that the distributed Koopman operator learning has the same convergence properties as a centralized Koopman operator learning problem, in the absence of optimal tracker, so long as the basis functions satisfy a set of state-based decomposition conditions. Experiments are provided to complement our theoretical results.
A Constructive Approach for One-Shot Training of Neural Networks Using Hypercube-Based Topological Coverings
Jan 09, 2019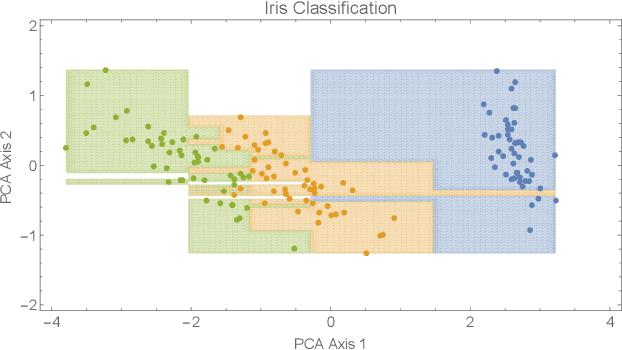
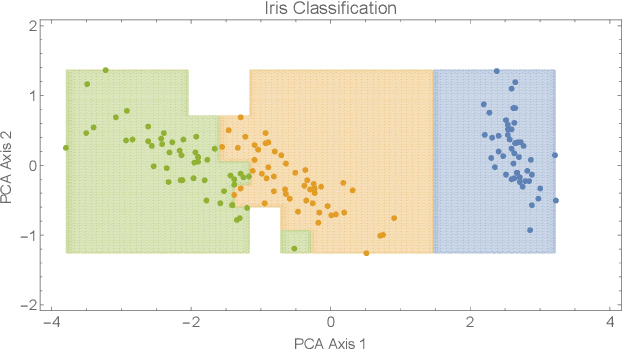
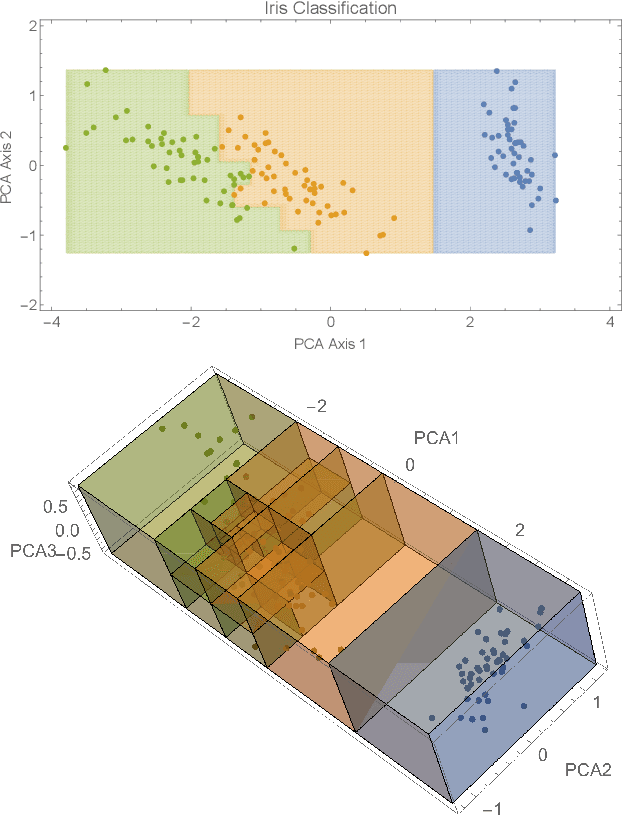
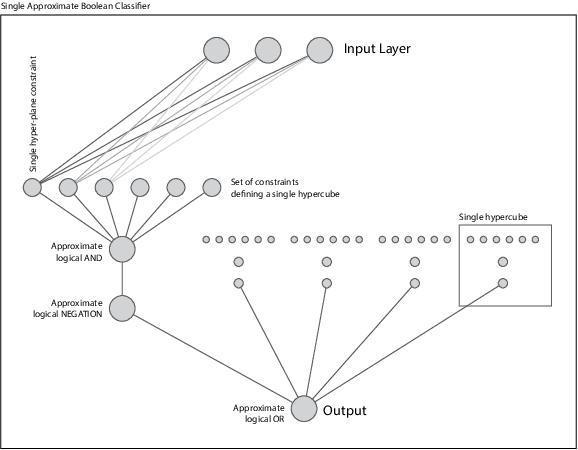
In this paper we presented a novel constructive approach for training deep neural networks using geometric approaches. We show that a topological covering can be used to define a class of distributed linear matrix inequalities, which in turn directly specify the shape and depth of a neural network architecture. The key insight is a fundamental relationship between linear matrix inequalities and their ability to bound the shape of data, and the rectified linear unit (ReLU) activation function employed in modern neural networks. We show that unit cover geometry and cover porosity are two design variables in cover-constructive learning that play a critical role in defining the complexity of the model and generalizability of the resulting neural network classifier. In the context of cover-constructive learning, these findings underscore the age old trade-off between model complexity and overfitting (as quantified by the number of elements in the data cover) and generalizability on test data. Finally, we benchmark on algorithm on the Iris, MNIST, and Wine dataset and show that the constructive algorithm is able to train a deep neural network classifier in one shot, achieving equal or superior levels of training and test classification accuracy with reduced training time.
Enforcing constraints for interpolation and extrapolation in Generative Adversarial Networks
Mar 22, 2018Generative Adversarial Networks (GANs) are becoming popular choices for unsupervised learning. At the same time there is a concerted effort in the machine learning community to expand the range of tasks in which learning can be applied as well as to utilize methods from other disciplines to accelerate learning. With this in mind, in the current work we suggest ways to enforce given constraints in the output of a GAN both for interpolation and extrapolation. The two cases need to be treated differently. For the case of interpolation, the incorporation of constraints is built into the training of the GAN. The incorporation of the constraints respects the primary game-theoretic setup of a GAN so it can be combined with existing algorithms. However, it can exacerbate the problem of instability during training that is well-known for GANs. We suggest adding small noise to the constraints as a simple remedy that has performed well in our numerical experiments. The case of extrapolation (prediction) is more involved. First, we employ a modified interpolation training process that uses noisy data but does not necessarily enforce the constraints during training. Second, the resulting modified interpolator is used for extrapolation where the constraints are enforced after each step through projection on the space of constraints.
A Class of Logistic Functions for Approximating State-Inclusive Koopman Operators
Dec 08, 2017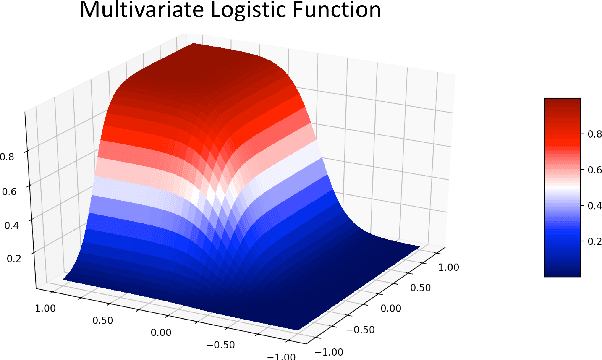
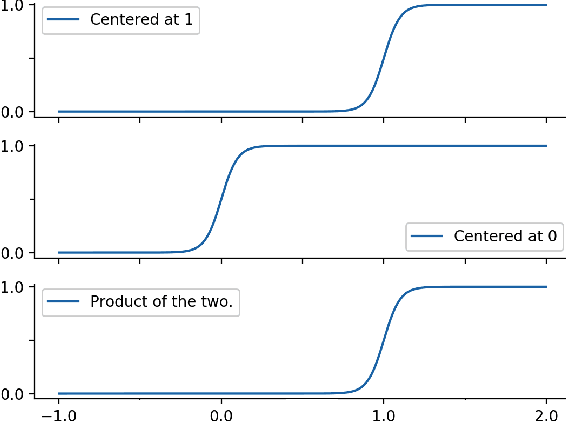
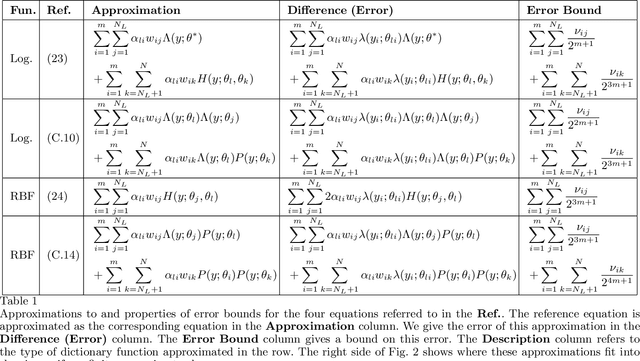
An outstanding challenge in nonlinear systems theory is identification or learning of a given nonlinear system's Koopman operator directly from data or models. Advances in extended dynamic mode decomposition approaches and machine learning methods have enabled data-driven discovery of Koopman operators, for both continuous and discrete-time systems. Since Koopman operators are often infinite-dimensional, they are approximated in practice using finite-dimensional systems. The fidelity and convergence of a given finite-dimensional Koopman approximation is a subject of ongoing research. In this paper we introduce a class of Koopman observable functions that confer an approximate closure property on their corresponding finite-dimensional approximations of the Koopman operator. We derive error bounds for the fidelity of this class of observable functions, as well as identify two key learning parameters which can be used to tune performance. We illustrate our approach on two classical nonlinear system models: the Van Der Pol oscillator and the bistable toggle switch.
Learning Deep Neural Network Representations for Koopman Operators of Nonlinear Dynamical Systems
Nov 17, 2017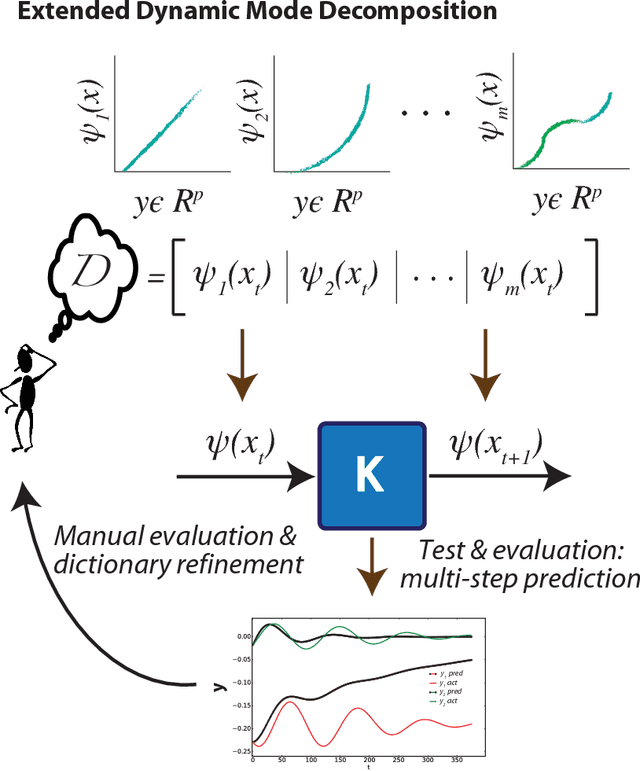
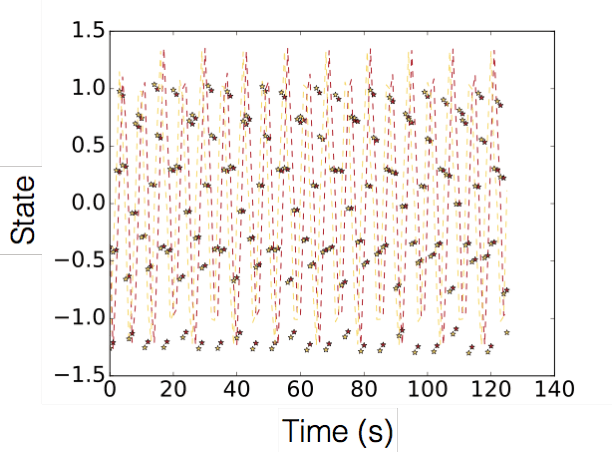
The Koopman operator has recently garnered much attention for its value in dynamical systems analysis and data-driven model discovery. However, its application has been hindered by the computational complexity of extended dynamic mode decomposition; this requires a combinatorially large basis set to adequately describe many nonlinear systems of interest, e.g. cyber-physical infrastructure systems, biological networks, social systems, and fluid dynamics. Often the dictionaries generated for these problems are manually curated, requiring domain-specific knowledge and painstaking tuning. In this paper we introduce a deep learning framework for learning Koopman operators of nonlinear dynamical systems. We show that this novel method automatically selects efficient deep dictionaries, outperforming state-of-the-art methods. We benchmark this method on partially observed nonlinear systems, including the glycolytic oscillator and show it is able to predict quantitatively 100 steps into the future, using only a single timepoint, and qualitative oscillatory behavior 400 steps into the future.
Solving differential equations with unknown constitutive relations as recurrent neural networks
Oct 06, 2017
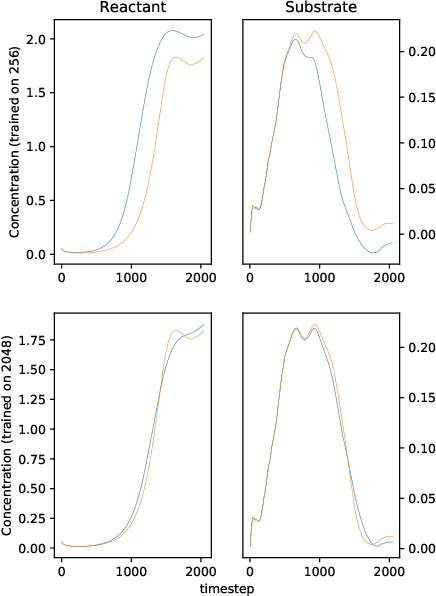
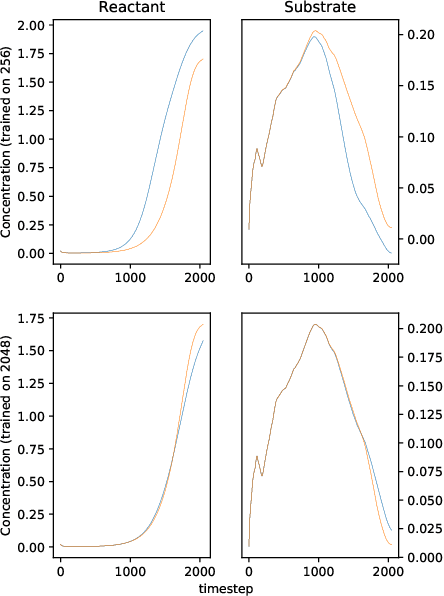
We solve a system of ordinary differential equations with an unknown functional form of a sink (reaction rate) term. We assume that the measurements (time series) of state variables are partially available, and we use recurrent neural network to "learn" the reaction rate from this data. This is achieved by including a discretized ordinary differential equations as part of a recurrent neural network training problem. We extend TensorFlow's recurrent neural network architecture to create a simple but scalable and effective solver for the unknown functions, and apply it to a fedbatch bioreactor simulation problem. Use of techniques from recent deep learning literature enables training of functions with behavior manifesting over thousands of time steps. Our networks are structurally similar to recurrent neural networks, but differences in design and function require modifications to the conventional wisdom about training such networks.
Decomposition of Nonlinear Dynamical Systems Using Koopman Gramians
Oct 04, 2017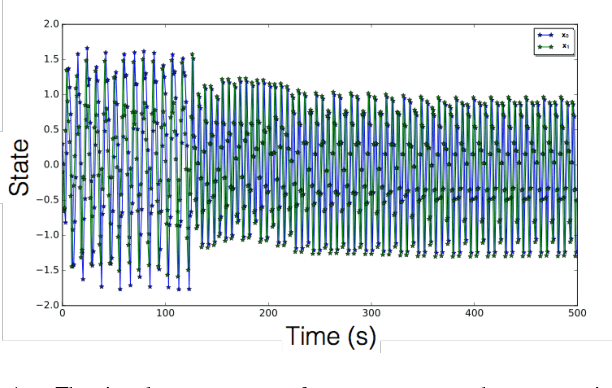
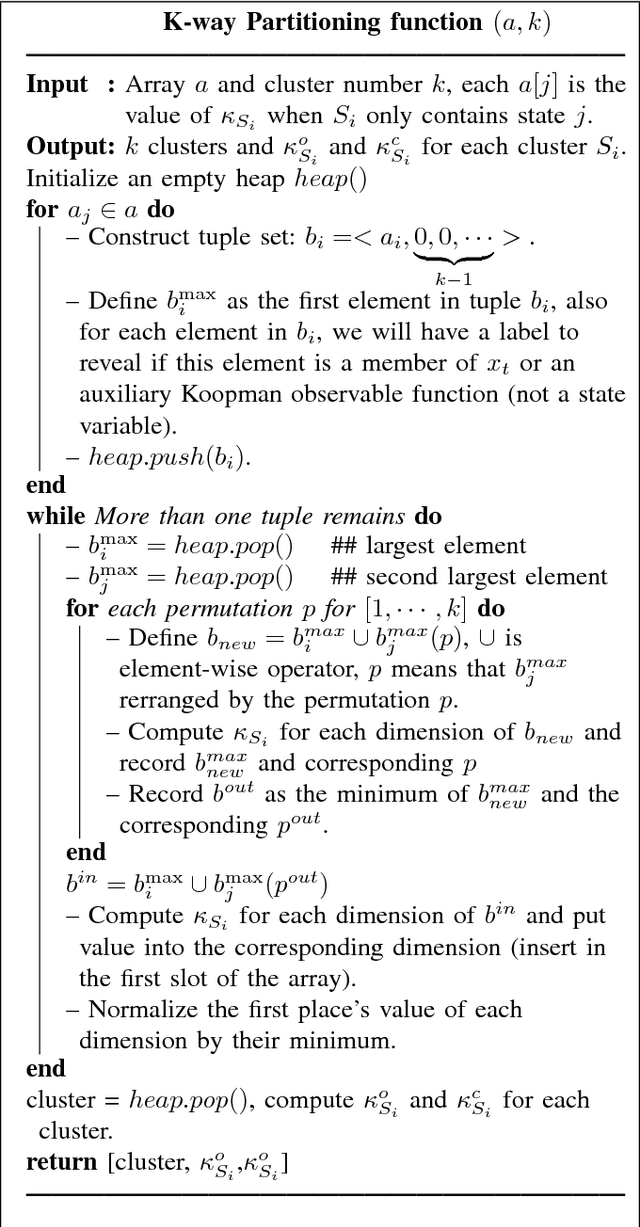
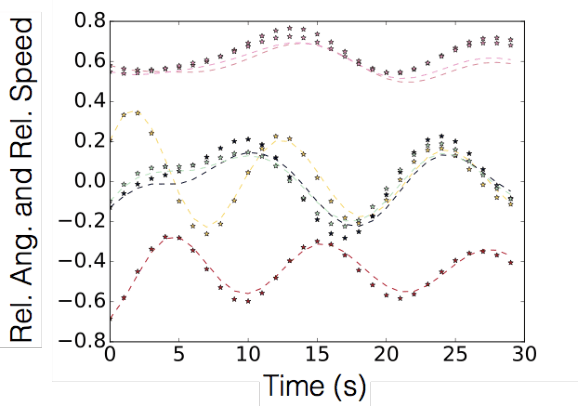
In this paper we propose a new Koopman operator approach to the decomposition of nonlinear dynamical systems using Koopman Gramians. We introduce the notion of an input-Koopman operator, and show how input-Koopman operators can be used to cast a nonlinear system into the classical state-space form, and identify conditions under which input and state observable functions are well separated. We then extend an existing method of dynamic mode decomposition for learning Koopman operators from data known as deep dynamic mode decomposition to systems with controls or disturbances. We illustrate the accuracy of the method in learning an input-state separable Koopman operator for an example system, even when the underlying system exhibits mixed state-input terms. We next introduce a nonlinear decomposition algorithm, based on Koopman Gramians, that maximizes internal subsystem observability and disturbance rejection from unwanted noise from other subsystems. We derive a relaxation based on Koopman Gramians and multi-way partitioning for the resulting NP-hard decomposition problem. We lastly illustrate the proposed algorithm with the swing dynamics for an IEEE 39-bus system.