 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Agent Learning of Numerical Methods for Hyperbolic PDEs with Factored Dec-MDP
May 31, 2022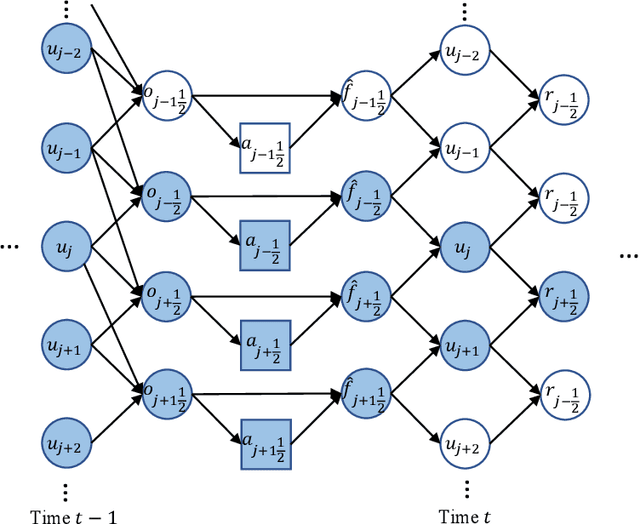
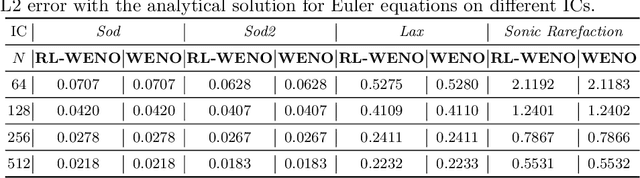
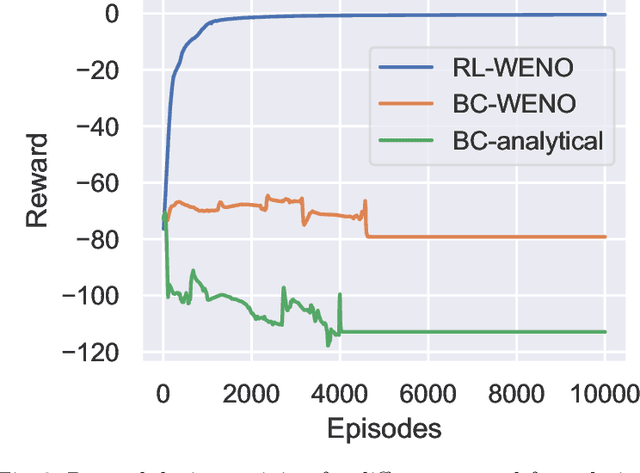
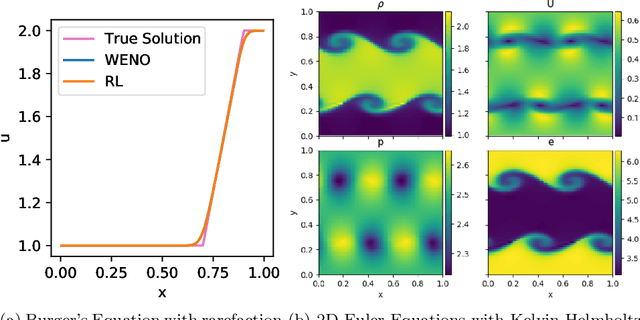
Factored decentralized Markov decision process (Dec-MDP) is a framework for modeling sequential decision making problems in multi-agent systems. In this paper, we formalize the learning of numerical methods for hyperbolic partial differential equations (PDEs), specifically the Weighted Essentially Non-Oscillatory (WENO) scheme, as a factored Dec-MDP problem. We show that different reward formulations lead to either reinforcement learning (RL) or behavior cloning, and a homogeneous policy could be learned for all agents under the RL formulation with a policy gradient algorithm. Because the trained agents only act on their local observations, the multi-agent system can be used as a general numerical method for hyperbolic PDEs and generalize to different spatial discretizations, episode lengths, dimensions, and even equation types.
Backpropagation through Time and Space: Learning Numerical Methods with Multi-Agent Reinforcement Learning
Mar 28, 2022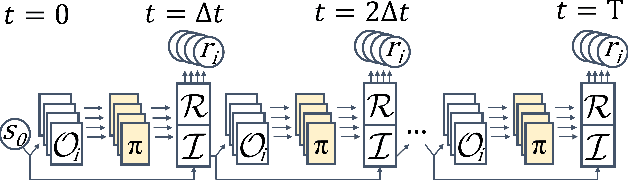



We introduce Backpropagation Through Time and Space (BPTTS), a method for training a recurrent spatio-temporal neural network, that is used in a homogeneous multi-agent reinforcement learning (MARL) setting to learn numerical methods for hyperbolic conservation laws. We treat the numerical schemes underlying partial differential equations (PDEs) as a Partially Observable Markov Game (POMG) in Reinforcement Learning (RL). Similar to numerical solvers, our agent acts at each discrete location of a computational space for efficient and generalizable learning. To learn higher-order spatial methods by acting on local states, the agent must discern how its actions at a given spatiotemporal location affect the future evolution of the state. The manifestation of this non-stationarity is addressed by BPTTS, which allows for the flow of gradients across both space and time. The learned numerical policies are comparable to the SOTA numerics in two settings, the Burgers' Equation and the Euler Equations, and generalize well to other simulation set-ups.
Diverse Exploration via Conjugate Policies for Policy Gradient Methods
Feb 10, 2019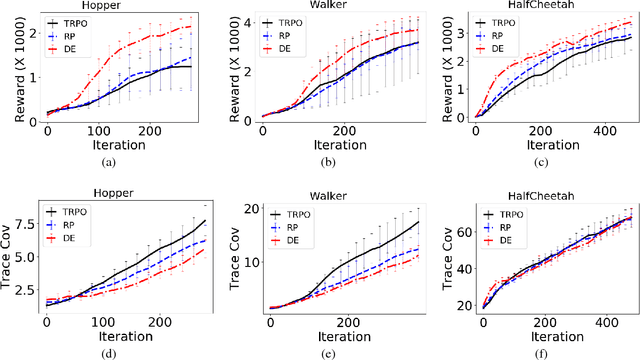
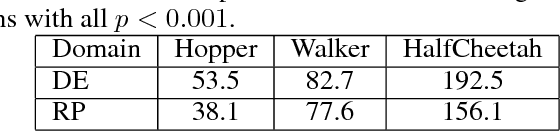
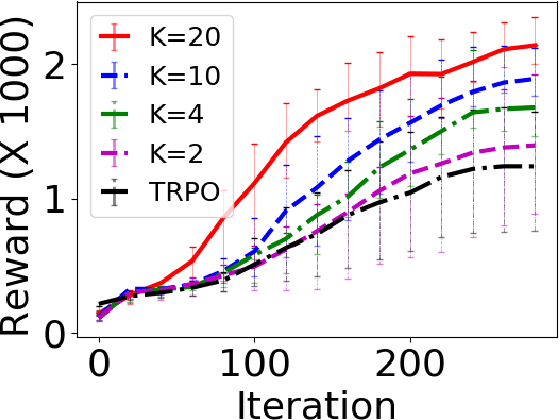
We address the challenge of effective exploration while maintaining good performance in policy gradient methods. As a solution, we propose diverse exploration (DE) via conjugate policies. DE learns and deploys a set of conjugate policies which can be conveniently generated as a byproduct of conjugate gradient descent. We provide both theoretical and empirical results showing the effectiveness of DE at achieving exploration, improving policy performance, and the advantage of DE over exploration by random policy perturbations.