 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEffect of Haptic Assistance Strategy on Mental Engagement in Fine Motor Tasks
Mar 16, 2023This study investigates the effect of haptic control strategies on a subject's mental engagement during a fine motor handwriting rehabilitation task. The considered control strategies include an error-reduction (ER) and an error-augmentation (EA), which are tested on both dominant and non-dominant hand. A non-invasive brain-computer interface is used to monitor the electroencephalogram (EEG) activities of the subjects and evaluate the subject's mental engagement using the power of multiple frequency bands (theta, alpha, and beta). Statistical analysis of the effect of the control strategy on mental engagement revealed that the choice of the haptic control strategy has a significant effect (p < 0.001) on mental engagement depending on the type of hand (dominant or non-dominant). Among the evaluated strategies, EA is shown to be more mentally engaging when compared with the ER under the non-dominant hand.
* 18 Pages, 11 Figures, Journal Pre-print
Scalable Coverage Path Planning of Multi-Robot Teams for Monitoring Non-Convex Areas
Mar 26, 2021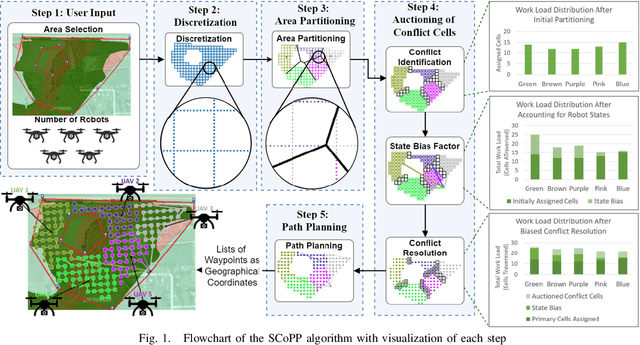

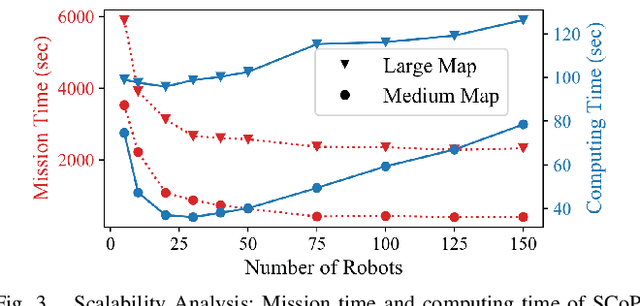
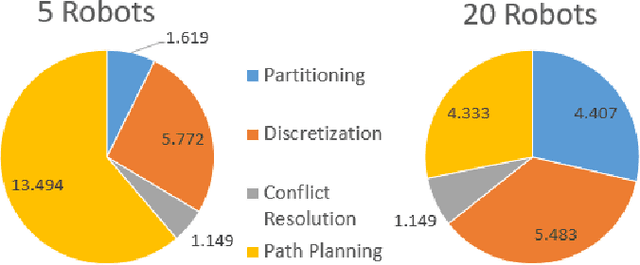
This paper presents a novel multi-robot coverage path planning (CPP) algorithm - aka SCoPP - that provides a time-efficient solution, with workload balanced plans for each robot in a multi-robot system, based on their initial states. This algorithm accounts for discontinuities (e.g., no-fly zones) in a specified area of interest, and provides an optimized ordered list of way-points per robot using a discrete, computationally efficient, nearest neighbor path planning algorithm. This algorithm involves five main stages, which include the transformation of the user's input as a set of vertices in geographical coordinates, discretization, load-balanced partitioning, auctioning of conflict cells in a discretized space, and a path planning procedure. To evaluate the effectiveness of the primary algorithm, a multi-unmanned aerial vehicle (UAV) post-flood assessment application is considered, and the performance of the algorithm is tested on three test maps of varying sizes. Additionally, our method is compared with a state-of-the-art method created by Guasella et al. Further analyses on scalability and computational time of SCoPP are conducted. The results show that SCoPP is superior in terms of mission completion time; its computing time is found to be under 2 mins for a large map covered by a 150-robot team, thereby demonstrating its computationally scalability.
Selective Eye-gaze Augmentation To Enhance Imitation Learning In Atari Games
Dec 05, 2020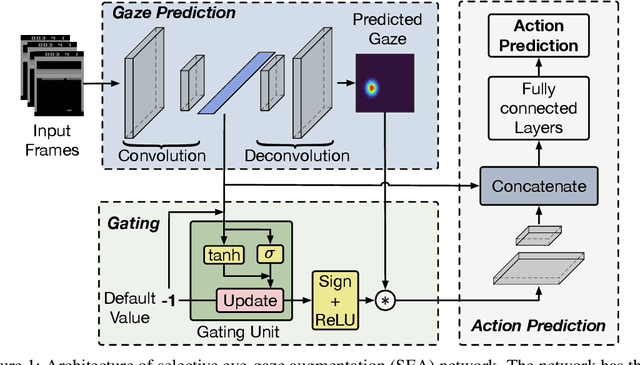


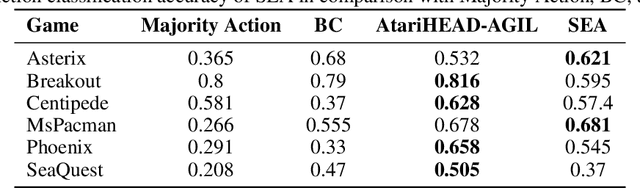
This paper presents the selective use of eye-gaze information in learning human actions in Atari games. Vast evidence suggests that our eye movement convey a wealth of information about the direction of our attention and mental states and encode the information necessary to complete a task. Based on this evidence, we hypothesize that selective use of eye-gaze, as a clue for attention direction, will enhance the learning from demonstration. For this purpose, we propose a selective eye-gaze augmentation (SEA) network that learns when to use the eye-gaze information. The proposed network architecture consists of three sub-networks: gaze prediction, gating, and action prediction network. Using the prior 4 game frames, a gaze map is predicted by the gaze prediction network which is used for augmenting the input frame. The gating network will determine whether the predicted gaze map should be used in learning and is fed to the final network to predict the action at the current frame. To validate this approach, we use publicly available Atari Human Eye-Tracking And Demonstration (Atari-HEAD) dataset consists of 20 Atari games with 28 million human demonstrations and 328 million eye-gazes (over game frames) collected from four subjects. We demonstrate the efficacy of selective eye-gaze augmentation in comparison with state of the art Attention Guided Imitation Learning (AGIL), Behavior Cloning (BC). The results indicate that the selective augmentation approach (the SEA network) performs significantly better than the AGIL and BC. Moreover, to demonstrate the significance of selective use of gaze through the gating network, we compare our approach with the random selection of the gaze. Even in this case, the SEA network performs significantly better validating the advantage of selectively using the gaze in demonstration learning.