 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTransformer Based Tissue Classification in Robotic Needle Biopsy
Sep 07, 2024



Image-guided minimally invasive robotic surgery is commonly employed for tasks such as needle biopsies or localized therapies. However, the nonlinear deformation of various tissue types presents difficulties for surgeons in achieving precise needle tip placement, particularly when relying on low-fidelity biopsy imaging systems. In this paper, we introduce a method to classify needle biopsy interventions and identify tissue types based on a comprehensive needle-tissue contact model that incorporates both position and force parameters. We trained a transformer model using a comprehensive dataset collected from a formerly developed robotics platform, which consists of synthetic and porcine tissue from various locations (liver, kidney, heart, belly, hock) marked with interaction phases (pre-puncture, puncture, post-puncture, neutral). This model achieves a significant classification accuracy of 0.93. Our demonstrated method can assist surgeons in identifying transitions to different tissues, aiding surgeons with tissue awareness.
* 8 pages
AR3n: A Reinforcement Learning-based Assist-As-Needed Controller for Robotic Rehabilitation
Mar 16, 2023



In this paper, we present AR3n (pronounced as Aaron), an assist-as-needed (AAN) controller that utilizes reinforcement learning to supply adaptive assistance during a robot assisted handwriting rehabilitation task. Unlike previous AAN controllers, our method does not rely on patient specific controller parameters or physical models. We propose the use of a virtual patient model to generalize AR3n across multiple subjects. The system modulates robotic assistance in realtime based on a subject's tracking error, while minimizing the amount of robotic assistance. The controller is experimentally validated through a set of simulations and human subject experiments. Finally, a comparative study with a traditional rule-based controller is conducted to analyze differences in assistance mechanisms of the two controllers.
Effect of Haptic Assistance Strategy on Mental Engagement in Fine Motor Tasks
Mar 16, 2023This study investigates the effect of haptic control strategies on a subject's mental engagement during a fine motor handwriting rehabilitation task. The considered control strategies include an error-reduction (ER) and an error-augmentation (EA), which are tested on both dominant and non-dominant hand. A non-invasive brain-computer interface is used to monitor the electroencephalogram (EEG) activities of the subjects and evaluate the subject's mental engagement using the power of multiple frequency bands (theta, alpha, and beta). Statistical analysis of the effect of the control strategy on mental engagement revealed that the choice of the haptic control strategy has a significant effect (p < 0.001) on mental engagement depending on the type of hand (dominant or non-dominant). Among the evaluated strategies, EA is shown to be more mentally engaging when compared with the ER under the non-dominant hand.
* 18 Pages, 11 Figures, Journal Pre-print
iART: Learning from Demonstration for Assisted Robotic Therapy Using LSTM
Mar 02, 2023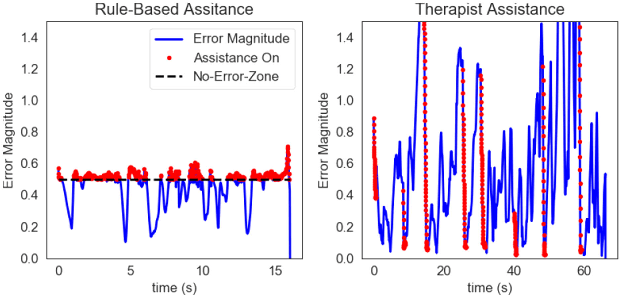
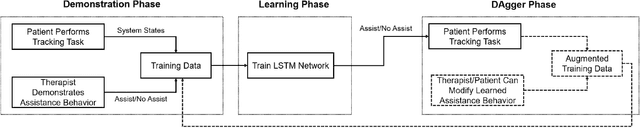
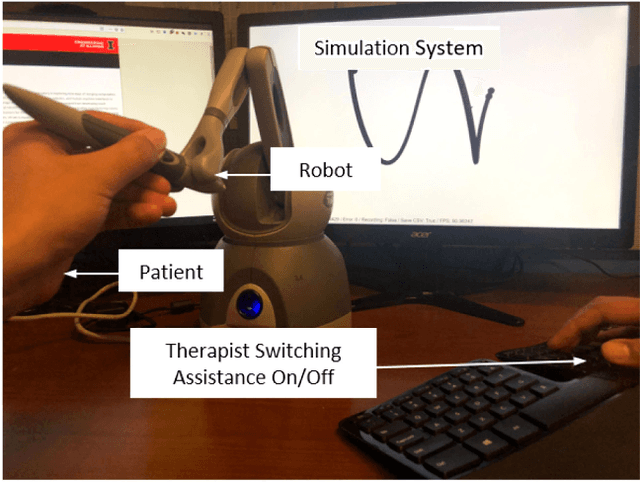
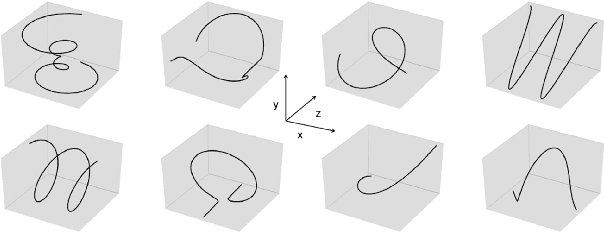
In this paper, we present an intelligent Assistant for Robotic Therapy (iART), that provides robotic assistance during 3D trajectory tracking tasks. We propose a novel LSTM-based robot learning from demonstration (LfD) paradigm to mimic a therapist's assistance behavior. iART presents a trajectory agnostic LfD routine that can generalize learned behavior from a single trajectory to any 3D shape. Once the therapist's behavior has been learned, iART enables the patient to modify this behavior as per their preference. The system requires only a single demonstration of 2 minutes and exhibits a mean accuracy of 91.41% in predicting, and hence mimicking a therapist's assistance behavior. The system delivers stable assistance in realtime and successfully reproduces different types of assistance behaviors.
* 8 pages, 10 figures, presented at ICRA 2020