 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeiART: Learning from Demonstration for Assisted Robotic Therapy Using LSTM
Paper and Code
Mar 02, 2023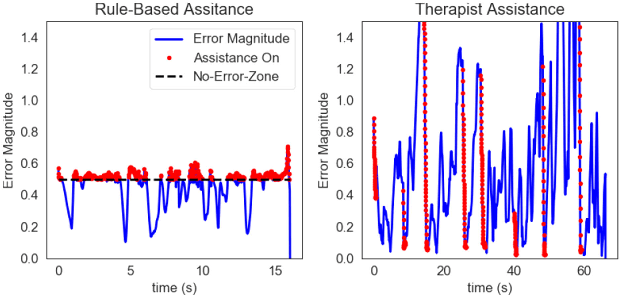
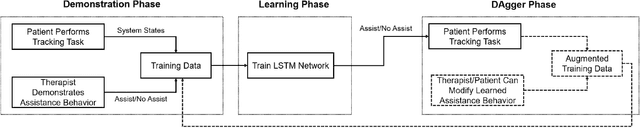
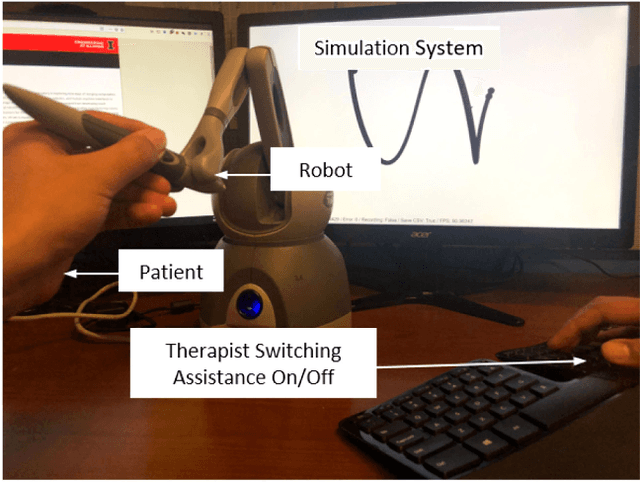
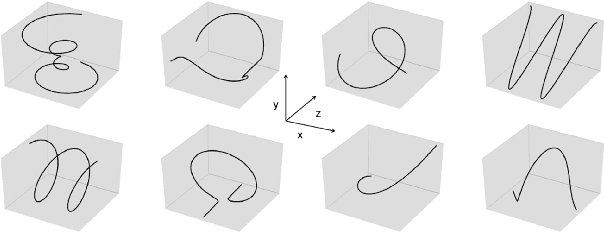
In this paper, we present an intelligent Assistant for Robotic Therapy (iART), that provides robotic assistance during 3D trajectory tracking tasks. We propose a novel LSTM-based robot learning from demonstration (LfD) paradigm to mimic a therapist's assistance behavior. iART presents a trajectory agnostic LfD routine that can generalize learned behavior from a single trajectory to any 3D shape. Once the therapist's behavior has been learned, iART enables the patient to modify this behavior as per their preference. The system requires only a single demonstration of 2 minutes and exhibits a mean accuracy of 91.41% in predicting, and hence mimicking a therapist's assistance behavior. The system delivers stable assistance in realtime and successfully reproduces different types of assistance behaviors.