 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePerformance Comparison of Design Optimization and Deep Learning-based Inverse Design
Aug 23, 2023Surrogate model-based optimization has been increasingly used in the field of engineering design. It involves creating a surrogate model with objective functions or constraints based on the data obtained from simulations or real-world experiments, and then finding the optimal solution from the model using numerical optimization methods. Recent advancements in deep learning-based inverse design methods have made it possible to generate real-time optimal solutions for engineering design problems, eliminating the requirement for iterative optimization processes. Nevertheless, no comprehensive study has yet closely examined the specific advantages and disadvantages of this novel approach compared to the traditional design optimization method. The objective of this paper is to compare the performance of traditional design optimization methods with deep learning-based inverse design methods by employing benchmark problems across various scenarios. Based on the findings of this study, we provide guidelines that can be taken into account for the future utilization of deep learning-based inverse design. It is anticipated that these guidelines will enhance the practical applicability of this approach to real engineering design problems.
Topology Optimization via Machine Learning and Deep Learning: A Review
Oct 19, 2022
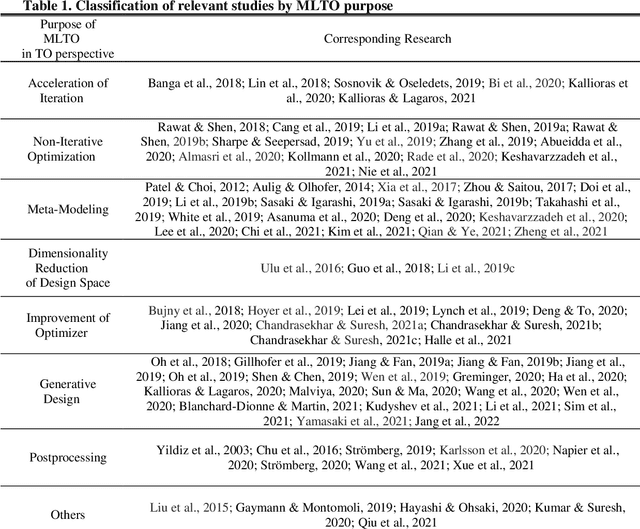
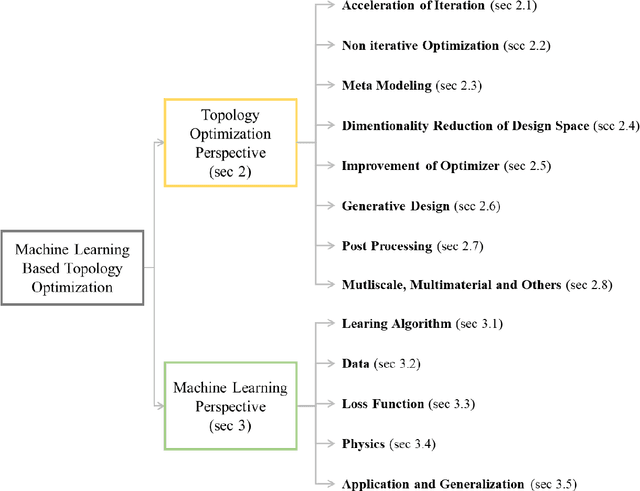
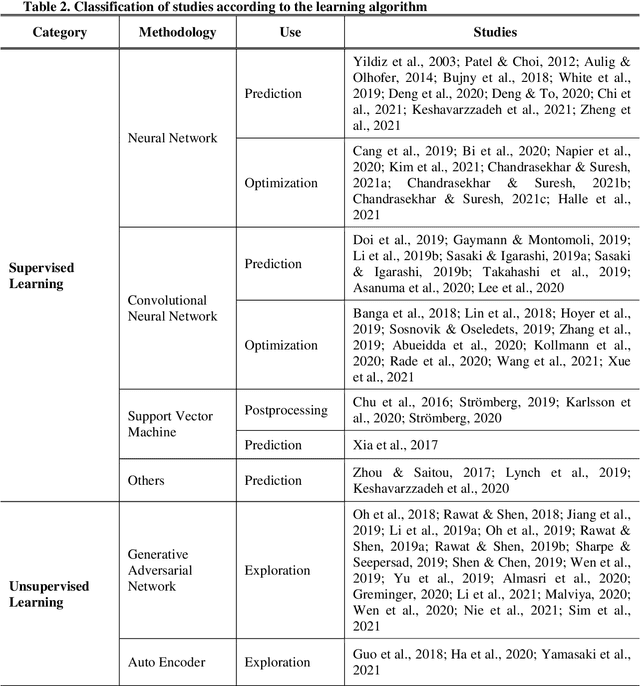
Topology optimization (TO) is a method of deriving an optimal design that satisfies a given load and boundary conditions within a design domain. This method enables effective design without initial design, but has been limited in use due to high computational costs. At the same time, machine learning (ML) methodology including deep learning has made great progress in the 21st century, and accordingly, many studies have been conducted to enable effective and rapid optimization by applying ML to TO. Therefore, this study reviews and analyzes previous research on ML-based TO (MLTO). Two different perspectives of MLTO are used to review studies: (1) TO and (2) ML perspectives. The TO perspective addresses "why" to use ML for TO, while the ML perspective addresses "how" to apply ML to TO. In addition, the limitations of current MLTO research and future research directions are examined.
A Single Multi-Task Deep Neural Network with Post-Processing for Object Detection with Reasoning and Robotic Grasp Detection
Sep 16, 2019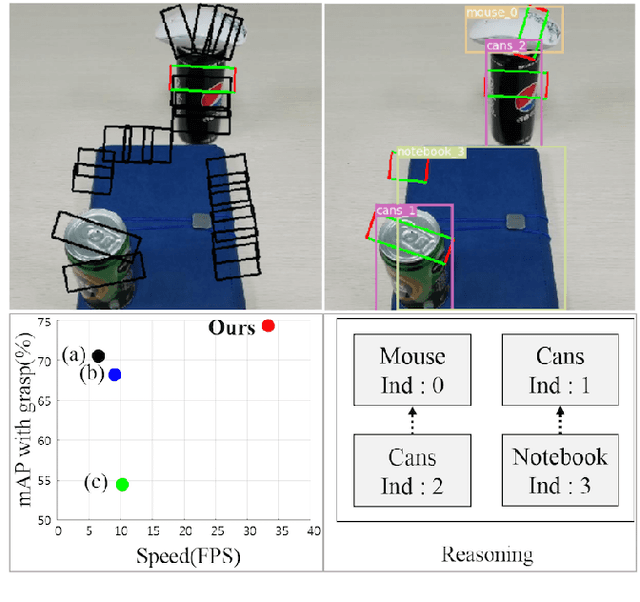
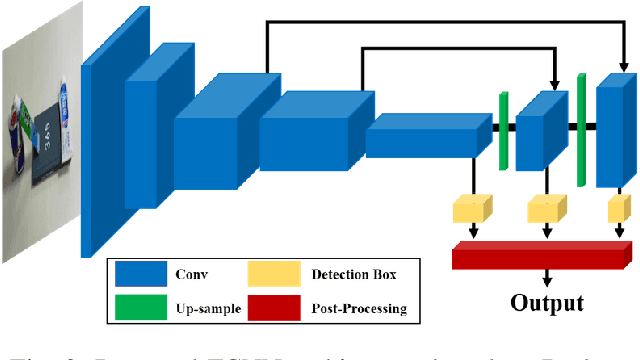
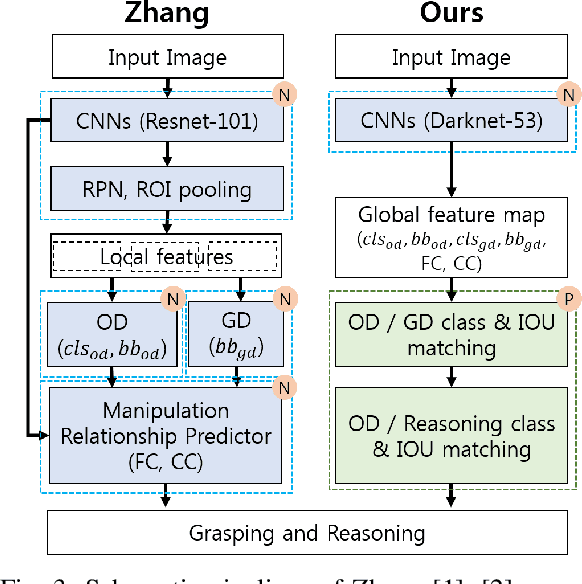
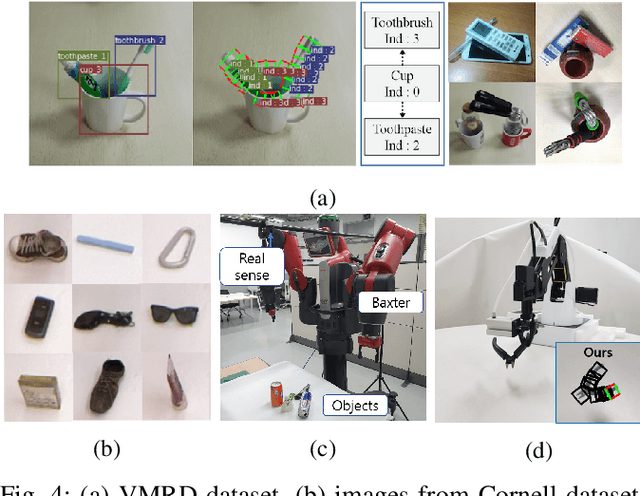
Recently, robotic grasp detection (GD) and object detection (OD) with reasoning have been investigated using deep neural networks (DNNs). There have been works to combine these multi-tasks using separate networks so that robots can deal with situations of grasping specific target objects in the cluttered, stacked, complex piles of novel objects from a single RGB-D camera. We propose a single multi-task DNN that yields the information on GD, OD and relationship reasoning among objects with a simple post-processing. Our proposed methods yielded state-of-the-art performance with the accuracy of 98.6% and 74.2% and the computation speed of 33 and 62 frame per second on VMRD and Cornell datasets, respectively. Our methods also yielded 95.3% grasp success rate for single novel object grasping with a 4-axis robot arm and 86.7% grasp success rate in cluttered novel objects with a Baxter robot.