 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Drone-based Mapping of Volcanic Gases using Gas Tomography
May 26, 2026Volcanoes emit large amounts of CO2, directly influencing human lives. Mapping volcanic gas emissions helps to forecast eruptions and understand the impact of volcanoes on climate and the environment. Drone-based gas sensing significantly reduces risks in volcanic monitoring but faces technical limitations when measuring gas, as rotor downwash disperses the gas plume before detection. Gas Tomography using remote gas sensing addresses this challenge. At the Salinelle dei Cappuccini mud volcanoes, we demonstrate that while drone-mounted in-situ sensors failed to detect CO2 emissions due to aerodynamic disturbance, open-path sensing successfully enabled remote gas distribution mapping. We present a novel model-based gas tomographic reconstruction approach that incorporates a Lagrangian model to compensate for wind-induced advection. The resulting gas distribution maps align with manually collected in-situ measurements, confirming that model-based gas tomography effectively overcomes downwash limitations and enables accurate mapping of volcanic emissions.
Mobile-to-Mobile Uncorrelated Scatter Channels
Jul 22, 2024


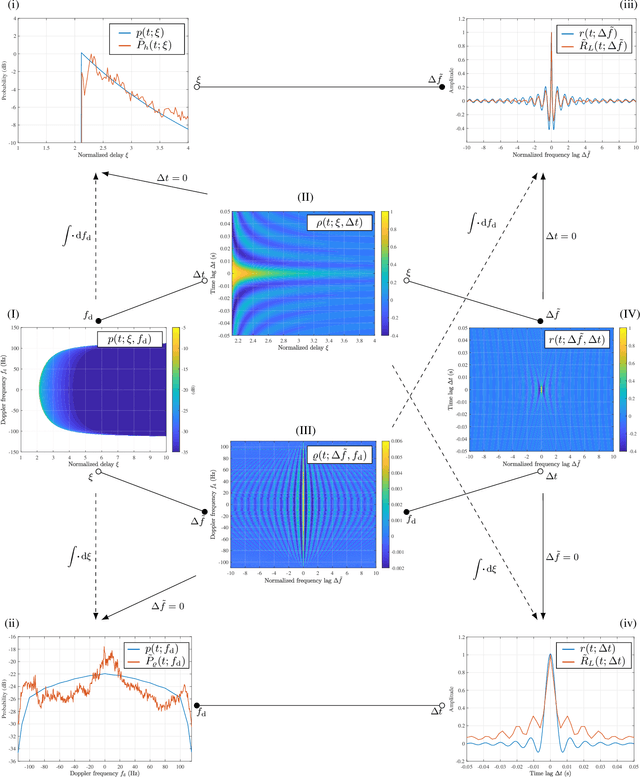
In this paper, we present a complete analytic probability based description of mobile-to-mobile uncorrelated scatter channels. The correlation based description introduced by Bello and Matz is thus complemented by the presented probabilistic description leading to a common theoretical description of uncorrelated scatter channels. Furthermore, we introduce novel twodimensional hybrid characteristic probability density functions, which remain a probability density in one of the variables and a characteristic function in the other variable. Such a probability based description allows us to derive a mathematical model, in which the attenuation of the scattering components is inherently included in these two-dimensional functions. Therefore, there is no need to determine the path loss exponent. Additionally, the Doppler probability density function with the inclusion of the path loss leads to a concave function of the Doppler spectrum, which is quite different from the Jakes and Doppler spectra and can be directly parameterized by the velocity vectors and geometry of the scattering plane. Thus, knowing those parameters permits the theoretical computation of the Doppler spectra and temporal characteristic functions. Finally, we present a comparison between the computed probability based theoretical results and measurement data for a generic mobile-to-mobile channel. The agreement between the two shows the usefulness of the probability based description and confirms new shapes of the Doppler power spectra.
An Autonomous Drone Swarm for Detecting and Tracking Anomalies among Dense Vegetation
Jul 15, 2024Swarms of drones offer an increased sensing aperture, and having them mimic behaviors of natural swarms enhances sampling by adapting the aperture to local conditions. We demonstrate that such an approach makes detecting and tracking heavily occluded targets practically feasible. While object classification applied to conventional aerial images generalizes poorly the randomness of occlusion and is therefore inefficient even under lightly occluded conditions, anomaly detection applied to synthetic aperture integral images is robust for dense vegetation, such as forests, and is independent of pre-trained classes. Our autonomous swarm searches the environment for occurrences of the unknown or unexpected, tracking them while continuously adapting its sampling pattern to optimize for local viewing conditions. In our real-life field experiments with a swarm of six drones, we achieved an average positional accuracy of 0.39 m with an average precision of 93.2% and an average recall of 95.9%. Here, adapted particle swarm optimization considers detection confidences and predicted target appearance. We show that sensor noise can effectively be included in the synthetic aperture image integration process, removing the need for a computationally costly optimization of high-dimensional parameter spaces. Finally, we present a complete hard- and software framework that supports low-latency transmission (approx. 80 ms round-trip time) and fast processing (approx. 600 ms per formation step) of extensive (70-120 Mbit/s) video and telemetry data, and swarm control for swarms of up to ten drones.
Gas Source Localization Using physics Guided Neural Networks
May 07, 2024This work discusses a novel method for estimating the location of a gas source based on spatially distributed concentration measurements taken, e.g., by a mobile robot or flying platform that follows a predefined trajectory to collect samples. The proposed approach uses a Physics-Guided Neural Network to approximate the gas dispersion with the source location as an additional network input. After an initial offline training phase, the neural network can be used to efficiently solve the inverse problem of localizing the gas source based on measurements. The proposed approach allows avoiding rather costly numerical simulations of gas physics needed for solving inverse problems. Our experiments show that the method localizes the source well, even when dealing with measurements affected by noise.
Reciprocal Visibility
Feb 10, 2024We propose a guidance strategy to optimize real-time synthetic aperture sampling for occlusion removal with drones by pre-scanned point-cloud data. Depth information can be used to compute visibility of points on the ground for individual drone positions in the air. Inspired by Helmholtz reciprocity, we introduce reciprocal visibility to determine the dual situation - the visibility of potential sampling position in the air from given points of interest on the ground. The resulting visibility map encodes which point on the ground is visible by which magnitude from any position in the air. Based on such a map, we demonstrate a first greedy sampling optimization.
Deep Reinforcement Multi-agent Learning framework for Information Gathering with Local Gaussian Processes for Water Monitoring
Jan 09, 2024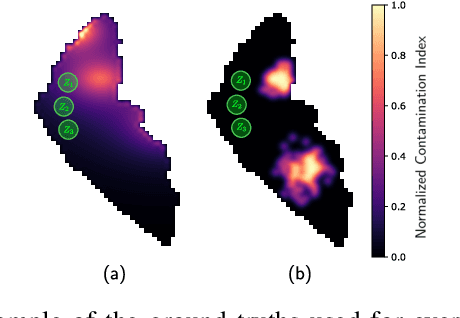


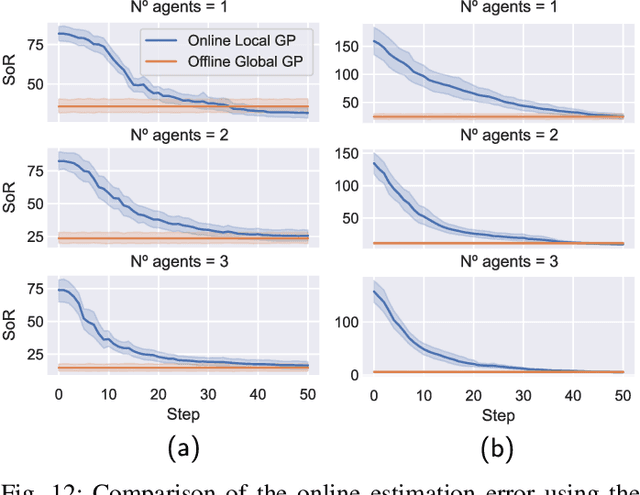
The conservation of hydrological resources involves continuously monitoring their contamination. A multi-agent system composed of autonomous surface vehicles is proposed in this paper to efficiently monitor the water quality. To achieve a safe control of the fleet, the fleet policy should be able to act based on measurements and to the the fleet state. It is proposed to use Local Gaussian Processes and Deep Reinforcement Learning to jointly obtain effective monitoring policies. Local Gaussian processes, unlike classical global Gaussian processes, can accurately model the information in a dissimilar spatial correlation which captures more accurately the water quality information. A Deep convolutional policy is proposed, that bases the decisions on the observation on the mean and variance of this model, by means of an information gain reward. Using a Double Deep Q-Learning algorithm, agents are trained to minimize the estimation error in a safe manner thanks to a Consensus-based heuristic. Simulation results indicate an improvement of up to 24% in terms of the mean absolute error with the proposed models. Also, training results with 1-3 agents indicate that our proposed approach returns 20% and 24% smaller average estimation errors for, respectively, monitoring water quality variables and monitoring algae blooms, as compared to state-of-the-art approaches
Sparse Estimation using Bayesian Hierarchical Prior Modeling for Real and Complex Linear Models
Oct 26, 2014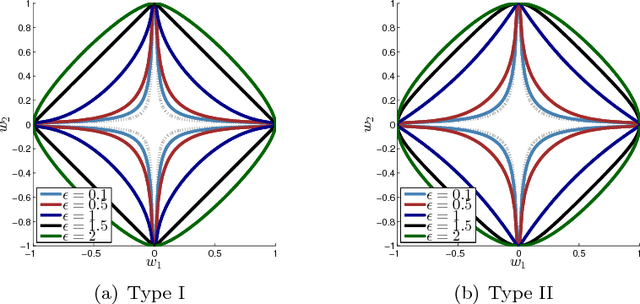
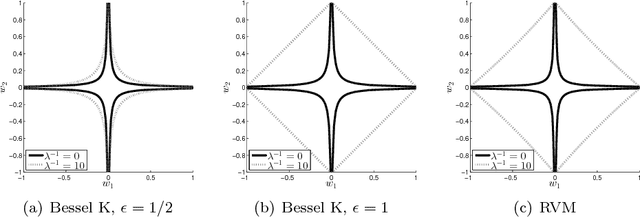
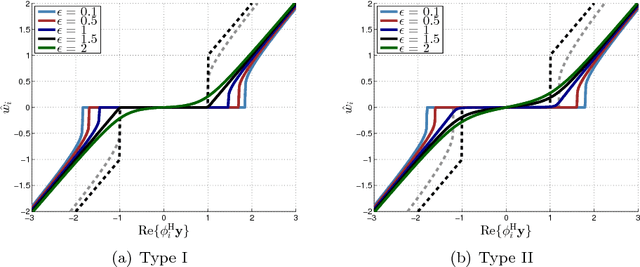
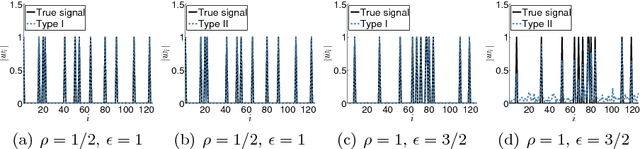
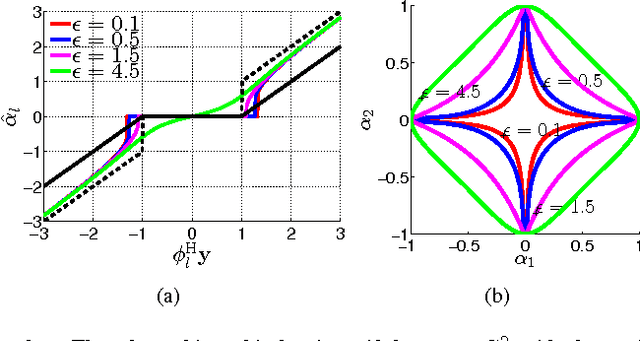
In sparse Bayesian learning (SBL), Gaussian scale mixtures (GSMs) have been used to model sparsity-inducing priors that realize a class of concave penalty functions for the regression task in real-valued signal models. Motivated by the relative scarcity of formal tools for SBL in complex-valued models, this paper proposes a GSM model - the Bessel K model - that induces concave penalty functions for the estimation of complex sparse signals. The properties of the Bessel K model are analyzed when it is applied to Type I and Type II estimation. This analysis reveals that, by tuning the parameters of the mixing pdf different penalty functions are invoked depending on the estimation type used, the value of the noise variance, and whether real or complex signals are estimated. Using the Bessel K model, we derive a sparse estimator based on a modification of the expectation-maximization algorithm formulated for Type II estimation. The estimator includes as a special instance the algorithms proposed by Tipping and Faul [1] and by Babacan et al. [2]. Numerical results show the superiority of the proposed estimator over these state-of-the-art estimators in terms of convergence speed, sparseness, reconstruction error, and robustness in low and medium signal-to-noise ratio regimes.
* The paper provides a new comprehensive analysis of the theoretical foundations of the proposed estimators. Minor modification of the title
Application of Bayesian Hierarchical Prior Modeling to Sparse Channel Estimation
Apr 03, 2012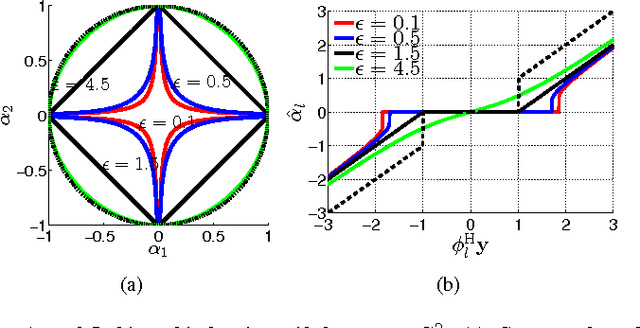
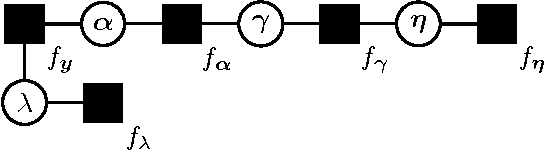
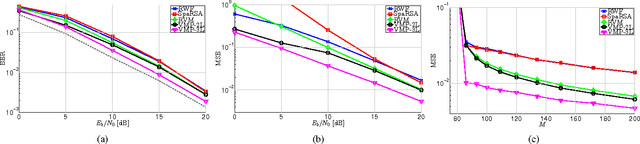
Existing methods for sparse channel estimation typically provide an estimate computed as the solution maximizing an objective function defined as the sum of the log-likelihood function and a penalization term proportional to the l1-norm of the parameter of interest. However, other penalization terms have proven to have strong sparsity-inducing properties. In this work, we design pilot-assisted channel estimators for OFDM wireless receivers within the framework of sparse Bayesian learning by defining hierarchical Bayesian prior models that lead to sparsity-inducing penalization terms. The estimators result as an application of the variational message-passing algorithm on the factor graph representing the signal model extended with the hierarchical prior models. Numerical results demonstrate the superior performance of our channel estimators as compared to traditional and state-of-the-art sparse methods.