 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMobile-to-Mobile Uncorrelated Scatter Channels
Jul 22, 2024


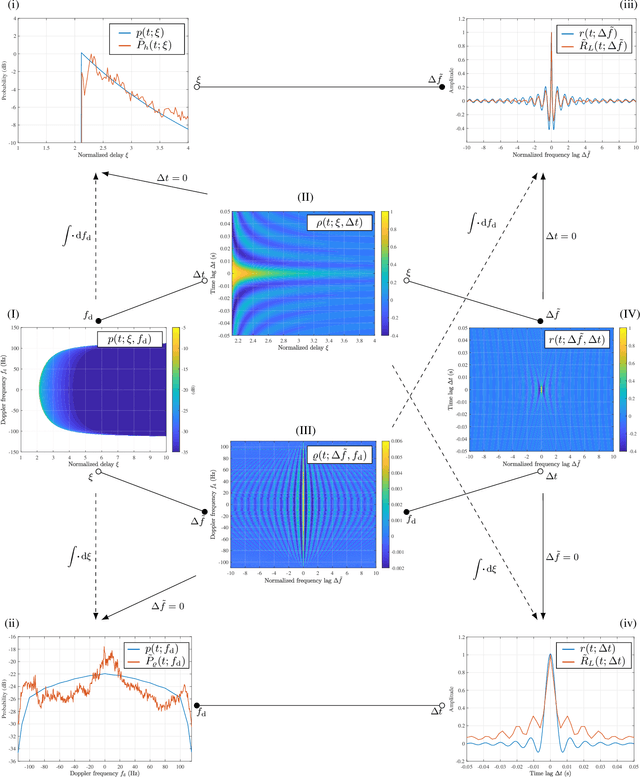
In this paper, we present a complete analytic probability based description of mobile-to-mobile uncorrelated scatter channels. The correlation based description introduced by Bello and Matz is thus complemented by the presented probabilistic description leading to a common theoretical description of uncorrelated scatter channels. Furthermore, we introduce novel twodimensional hybrid characteristic probability density functions, which remain a probability density in one of the variables and a characteristic function in the other variable. Such a probability based description allows us to derive a mathematical model, in which the attenuation of the scattering components is inherently included in these two-dimensional functions. Therefore, there is no need to determine the path loss exponent. Additionally, the Doppler probability density function with the inclusion of the path loss leads to a concave function of the Doppler spectrum, which is quite different from the Jakes and Doppler spectra and can be directly parameterized by the velocity vectors and geometry of the scattering plane. Thus, knowing those parameters permits the theoretical computation of the Doppler spectra and temporal characteristic functions. Finally, we present a comparison between the computed probability based theoretical results and measurement data for a generic mobile-to-mobile channel. The agreement between the two shows the usefulness of the probability based description and confirms new shapes of the Doppler power spectra.
Site-Specific Radio Channel Representation -- Current State and Future Applications
Jun 18, 2024



A site-specific radio channel representation considers the surroundings of the communication system through the environment geometry, such as buildings, vegetation, and mobile objects including their material and surface properties. In this article, we focus on communication technologies for 5G and beyond that are increasingly able to exploit the specific environment geometry for both communication and sensing. We present methods for a site-specific radio channel representation that is spatially consistent, such that mobile transmitter and receveiver cause a correlated time-varying channel impulse response. When modelled as random, this channel impulse response has non-stationary statistical properties, i.e., a time-variant Doppler spectrum, power delay profile, K-factor and spatial correlation. A site-specific radio channel representation will enable research into emerging 5G and beyond technologies such as distributed multiple-input multiple-output systems, reconfigurable intelligent surfaces, multi-band communication, and joint communication and sensing. These 5G and beyond technologies will be deployed for a wide range of environments, from dense urban areas to railways, road transportation, industrial automation, and unmanned aerial vehicles.
AdaptiveShape: Solving Shape Variability for 3D Object Detection with Geometry Aware Anchor Distributions
Feb 28, 2023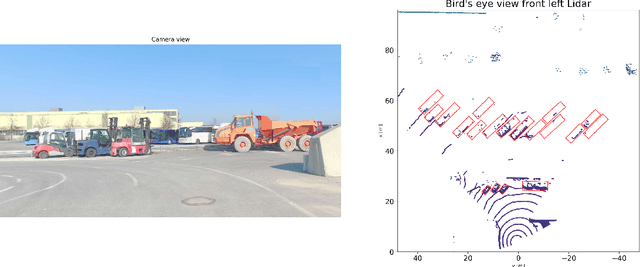
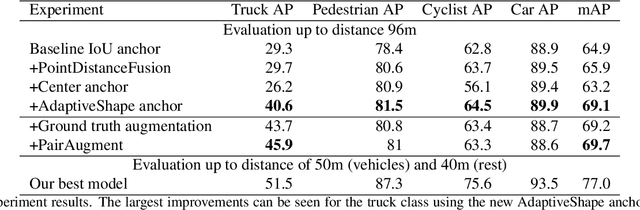
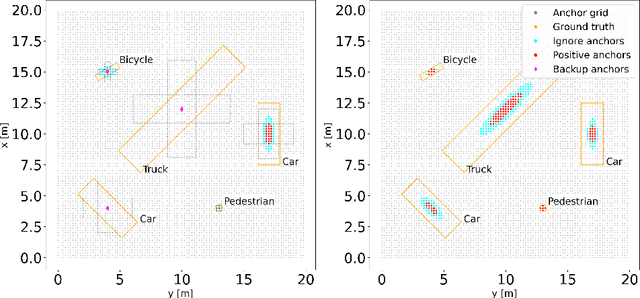
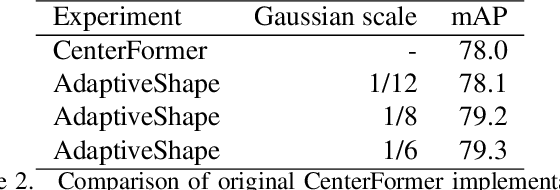
3D object detection with point clouds and images plays an important role in perception tasks such as autonomous driving. Current methods show great performance on detection and pose estimation of standard-shaped vehicles but lack behind on more complex shapes as e.g. semi-trailer truck combinations. Determining the shape and motion of those special vehicles accurately is crucial in yard operation and maneuvering and industrial automation applications. This work introduces several new methods to improve and measure the performance for such classes. State-of-the-art methods are based on predefined anchor grids or heatmaps for ground truth targets. However, the underlying representations do not take the shape of different sized objects into account. Our main contribution, AdaptiveShape, uses shape aware anchor distributions and heatmaps to improve the detection capabilities. For large vehicles we achieve +10.9% AP in comparison to current shape agnostic methods. Furthermore we introduce a new fast LiDAR-camera fusion. It is based on 2D bounding box camera detections which are available in many processing pipelines. This fusion method does not rely on perfectly calibrated or temporally synchronized systems and is therefore applicable to a broad range of robotic applications. We extend a standard point pillar network to account for temporal data and improve learning of complex object movements. In addition we extended a ground truth augmentation to use grouped object pairs to further improve truck AP by +2.2% compared to conventional augmentation.
Empirical Fading Model and Bayesian Calibration for Multipath-Enhanced Device-Free Localization
May 11, 2022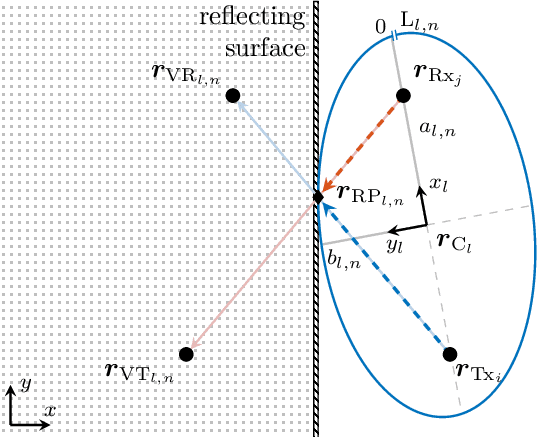
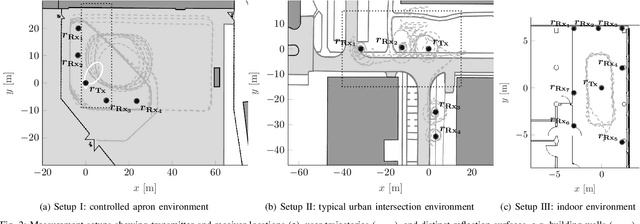
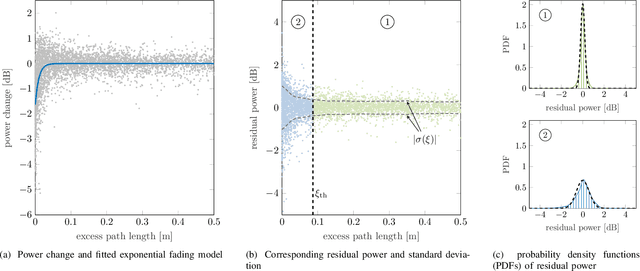
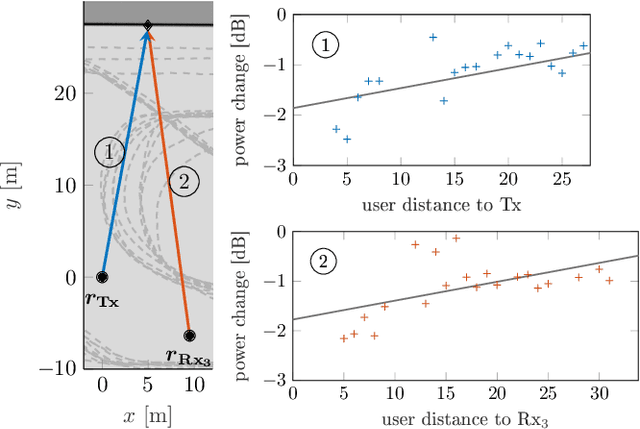
The performance of multipath-enhanced device-free localization severely depends on the information about the propagation paths within the network. While known for the line-of-sight, the propagation paths have yet to be determined for multipath components. This work provides a novel Bayesian calibration approach for determining the propagation paths by estimating reflection points. Therefore, first a statistical fading model is presented, that describes user-induced changes in the received signal of multipath components. The model is derived and validated empirically using an extensive set of wideband and ultra-wideband measurement data. Second, the Bayesian approach is presented, which, based on the derived empirical fading model, relates measured changes in the power of a multipath component to the location of the reflection point. Exploiting the geometric properties of multipath components caused by single-bounce reflections, the solution space of possible locations of reflection points is constrained to the delay ellipse. Thus, a one-dimensional elliptic estimation problem can be formulated, which is solved using a point mass filter. The applicability of the proposed approach is demonstrated and evaluated based on measurement data. Independent of the underlying measurement system, the Bayesian calibration approach is shown to robustly estimate the locations of the reflection points in different environments.
Near optimal sample complexity for matrix and tensor normal models via geodesic convexity
Oct 14, 2021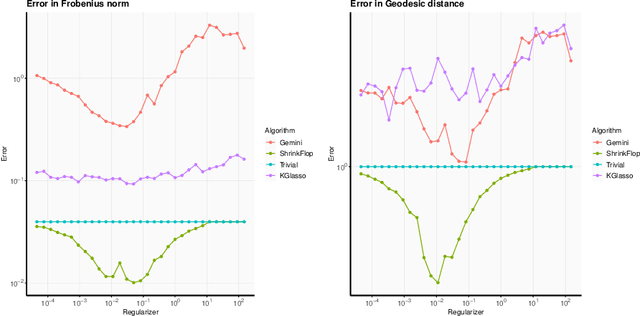
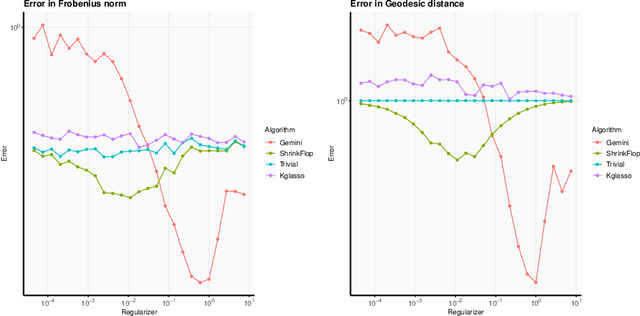
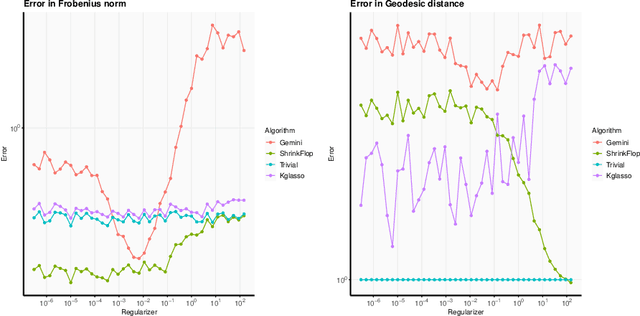
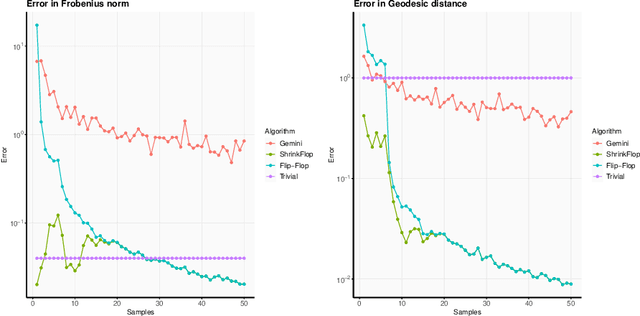
The matrix normal model, the family of Gaussian matrix-variate distributions whose covariance matrix is the Kronecker product of two lower dimensional factors, is frequently used to model matrix-variate data. The tensor normal model generalizes this family to Kronecker products of three or more factors. We study the estimation of the Kronecker factors of the covariance matrix in the matrix and tensor models. We show nonasymptotic bounds for the error achieved by the maximum likelihood estimator (MLE) in several natural metrics. In contrast to existing bounds, our results do not rely on the factors being well-conditioned or sparse. For the matrix normal model, all our bounds are minimax optimal up to logarithmic factors, and for the tensor normal model our bound for the largest factor and overall covariance matrix are minimax optimal up to constant factors provided there are enough samples for any estimator to obtain constant Frobenius error. In the same regimes as our sample complexity bounds, we show that an iterative procedure to compute the MLE known as the flip-flop algorithm converges linearly with high probability. Our main tool is geodesic strong convexity in the geometry on positive-definite matrices induced by the Fisher information metric. This strong convexity is determined by the expansion of certain random quantum channels. We also provide numerical evidence that combining the flip-flop algorithm with a simple shrinkage estimator can improve performance in the undersampled regime.
Developing an Underwater Network of Ocean Observation Systems with Digital Twin Prototypes -- A Field Report from the Baltic Sea
Mar 15, 2021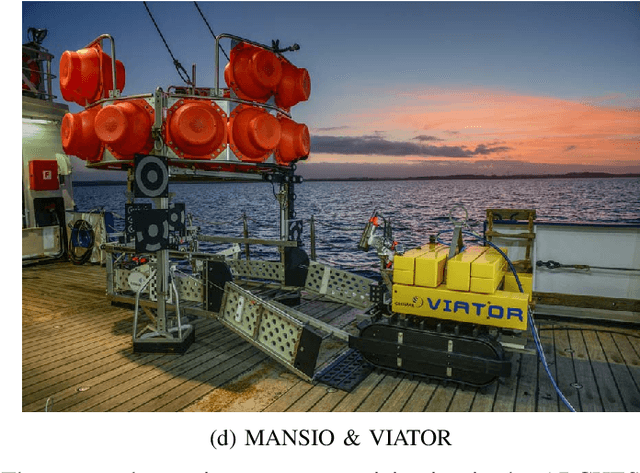
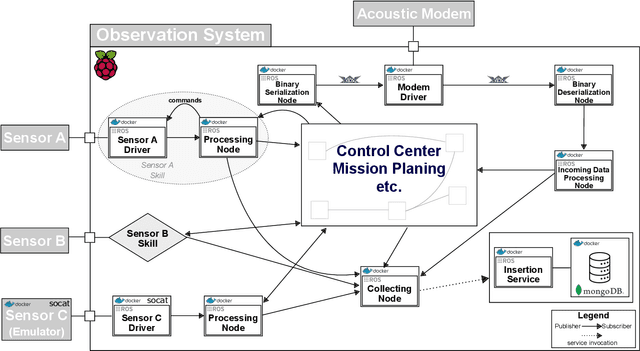
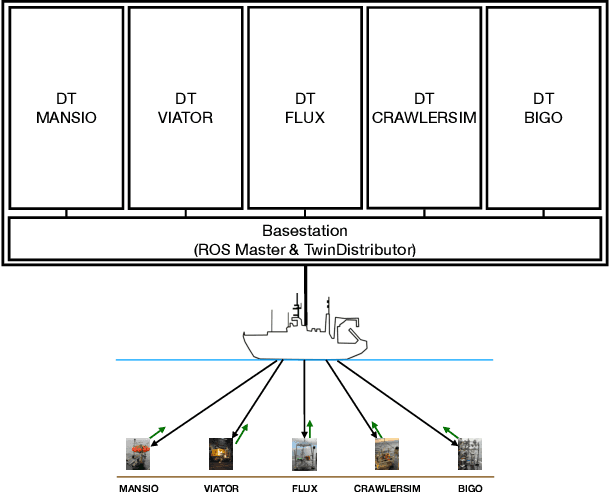
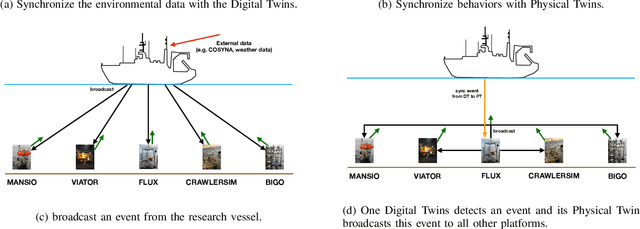
During the research cruise AL547 with RV ALKOR (October 20-31, 2020), a collaborative underwater network of ocean observation systems was deployed in Boknis Eck (SW Baltic Sea, German exclusive economic zone (EEZ)) in the context of the project ARCHES (Autonomous Robotic Networks to Help Modern Societies). This network was realized via a Digital Twin Prototype approach. During that period different scenarios were executed to demonstrate the feasibility of Digital Twins in an extreme environment such as underwater. One of the scenarios showed the collaboration of stage IV Digital Twins with their physical counterparts on the seafloor. This way, we address the research question, whether Digital Twins represent a feasible approach to operate mobile ad hoc networks for ocean and coastal observation.