 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisual Cooperative Drone Tracking for Open-Path Gas Measurements
Feb 24, 2026Open-path Tunable Diode Laser Absorption Spectroscopy offers an effective method for measuring, mapping, and monitoring gas concentrations, such as leaking CO2 or methane. Compared to spatial sampling of gas distributions using in-situ sensors, open-path sensors in combination with gas tomography algorithms can cover large outdoor environments faster in a non-invasive way. However, the requirement of a dedicated reflection surface for the open-path laser makes automating the spatial sampling process challenging. This publication presents a robotic system for collecting open-path measurements, making use of a sensor mounted on a ground-based pan-tilt unit and a small drone carrying a reflector. By means of a zoom camera, the ground unit visually tracks red LED markers mounted on the drone and aligns the sensor's laser beam with the reflector. Incorporating GNSS position information provided by the drone's flight controller further improves the tracking approach. Outdoor experiments validated the system's performance, demonstrating successful autonomous tracking and valid CO2 measurements at distances up to 60 meters. Furthermore, the system successfully measured a CO2 plume without interference from the drone's propulsion system, demonstrating its superiority compared to flying in-situ sensors.
A Lightweight Crowd Model for Robot Social Navigation
Aug 27, 2025Robots operating in human-populated environments must navigate safely and efficiently while minimizing social disruption. Achieving this requires estimating crowd movement to avoid congested areas in real-time. Traditional microscopic models struggle to scale in dense crowds due to high computational cost, while existing macroscopic crowd prediction models tend to be either overly simplistic or computationally intensive. In this work, we propose a lightweight, real-time macroscopic crowd prediction model tailored for human motion, which balances prediction accuracy and computational efficiency. Our approach simplifies both spatial and temporal processing based on the inherent characteristics of pedestrian flow, enabling robust generalization without the overhead of complex architectures. We demonstrate a 3.6 times reduction in inference time, while improving prediction accuracy by 3.1 %. Integrated into a socially aware planning framework, the model enables efficient and socially compliant robot navigation in dynamic environments. This work highlights that efficient human crowd modeling enables robots to navigate dense environments without costly computations.
Mobile-to-Mobile Uncorrelated Scatter Channels
Jul 22, 2024


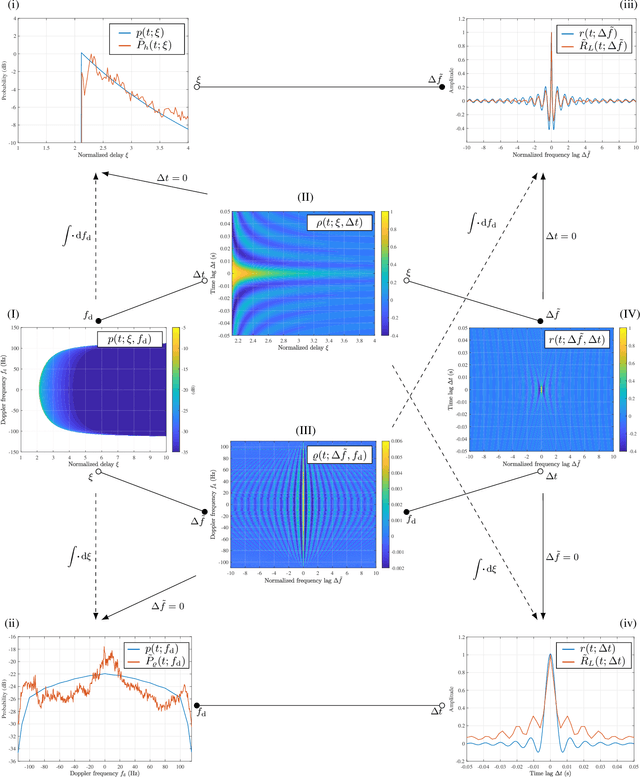
In this paper, we present a complete analytic probability based description of mobile-to-mobile uncorrelated scatter channels. The correlation based description introduced by Bello and Matz is thus complemented by the presented probabilistic description leading to a common theoretical description of uncorrelated scatter channels. Furthermore, we introduce novel twodimensional hybrid characteristic probability density functions, which remain a probability density in one of the variables and a characteristic function in the other variable. Such a probability based description allows us to derive a mathematical model, in which the attenuation of the scattering components is inherently included in these two-dimensional functions. Therefore, there is no need to determine the path loss exponent. Additionally, the Doppler probability density function with the inclusion of the path loss leads to a concave function of the Doppler spectrum, which is quite different from the Jakes and Doppler spectra and can be directly parameterized by the velocity vectors and geometry of the scattering plane. Thus, knowing those parameters permits the theoretical computation of the Doppler spectra and temporal characteristic functions. Finally, we present a comparison between the computed probability based theoretical results and measurement data for a generic mobile-to-mobile channel. The agreement between the two shows the usefulness of the probability based description and confirms new shapes of the Doppler power spectra.
Gas Source Localization Using physics Guided Neural Networks
May 07, 2024This work discusses a novel method for estimating the location of a gas source based on spatially distributed concentration measurements taken, e.g., by a mobile robot or flying platform that follows a predefined trajectory to collect samples. The proposed approach uses a Physics-Guided Neural Network to approximate the gas dispersion with the source location as an additional network input. After an initial offline training phase, the neural network can be used to efficiently solve the inverse problem of localizing the gas source based on measurements. The proposed approach allows avoiding rather costly numerical simulations of gas physics needed for solving inverse problems. Our experiments show that the method localizes the source well, even when dealing with measurements affected by noise.
CoVOR-SLAM: Cooperative SLAM using Visual Odometry and Ranges for Multi-Robot Systems
Nov 21, 2023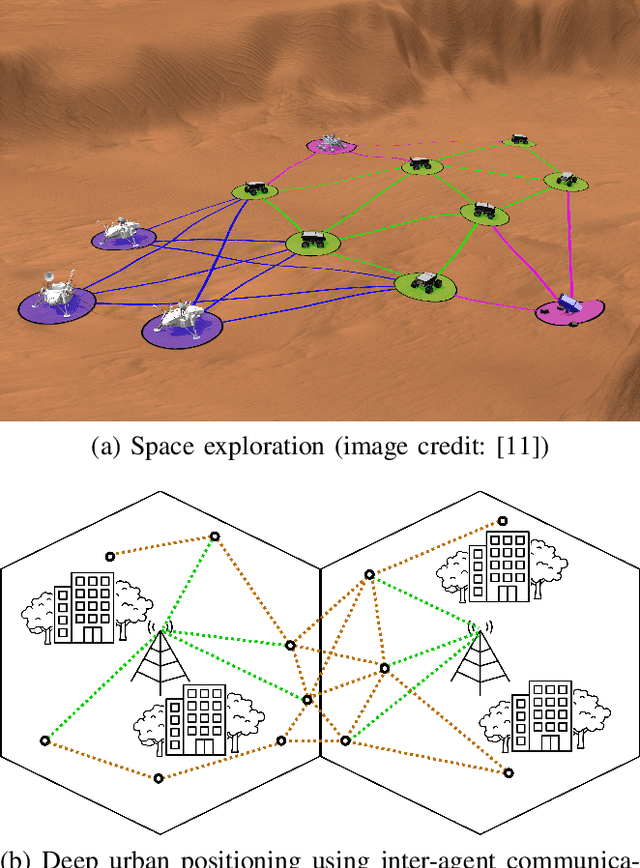
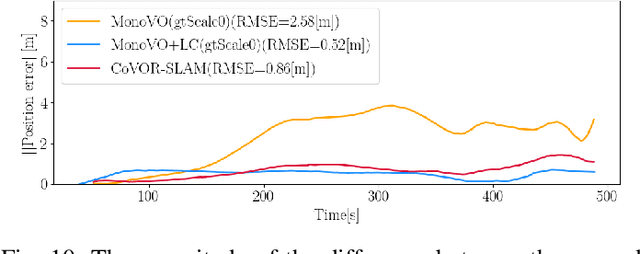
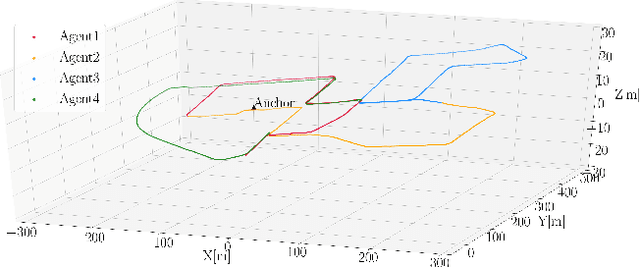
A swarm of robots has advantages over a single robot, since it can explore larger areas much faster and is more robust to single-point failures. Accurate relative positioning is necessary to successfully carry out a collaborative mission without collisions. When Visual Simultaneous Localization and Mapping (VSLAM) is used to estimate the poses of each robot, inter-agent loop closing is widely applied to reduce the relative positioning errors. This technique can mitigate errors using the feature points commonly observed by different robots. However, it requires significant computing and communication capabilities to detect inter-agent loops, and to process the data transmitted by multiple agents. In this paper, we propose Collaborative SLAM using Visual Odometry and Range measurements (CoVOR-SLAM) to overcome this challenge. In the framework of CoVOR-SLAM, robots only need to exchange pose estimates, covariances (uncertainty) of the estimates, and range measurements between robots. Since CoVOR-SLAM does not require to associate visual features and map points observed by different agents, the computational and communication loads are significantly reduced. The required range measurements can be obtained using pilot signals of the communication system, without requiring complex additional infrastructure. We tested CoVOR-SLAM using real images as well as real ultra-wideband-based ranges obtained with two rovers. In addition, CoVOR-SLAM is evaluated with a larger scale multi-agent setup exploiting public image datasets and ranges generated using a realistic simulation. The results show that CoVOR-SLAM can accurately estimate the robots' poses, requiring much less computational power and communication capabilities than the inter-agent loop closing technique.