 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoVOR-SLAM: Cooperative SLAM using Visual Odometry and Ranges for Multi-Robot Systems
Nov 21, 2023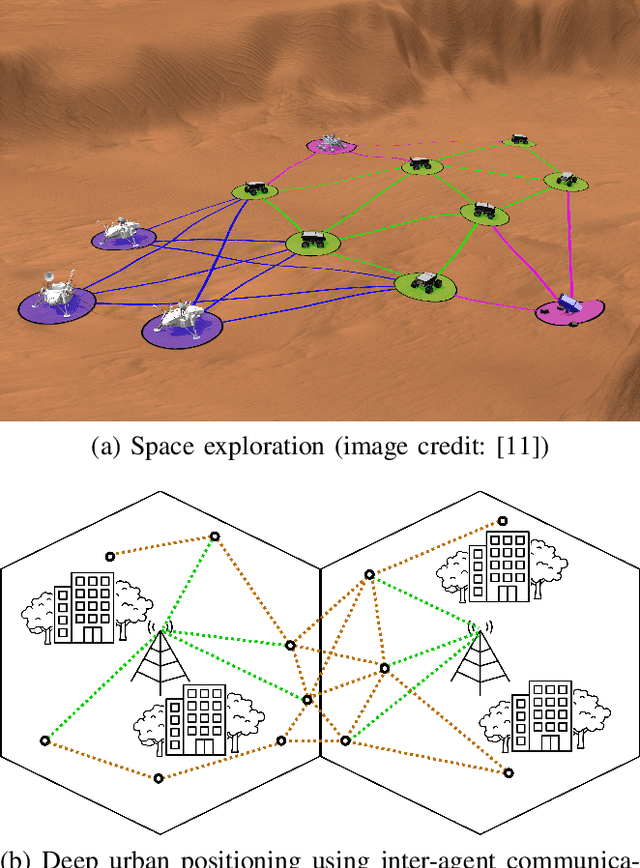
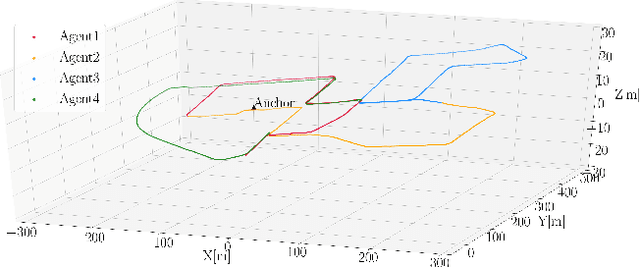
A swarm of robots has advantages over a single robot, since it can explore larger areas much faster and is more robust to single-point failures. Accurate relative positioning is necessary to successfully carry out a collaborative mission without collisions. When Visual Simultaneous Localization and Mapping (VSLAM) is used to estimate the poses of each robot, inter-agent loop closing is widely applied to reduce the relative positioning errors. This technique can mitigate errors using the feature points commonly observed by different robots. However, it requires significant computing and communication capabilities to detect inter-agent loops, and to process the data transmitted by multiple agents. In this paper, we propose Collaborative SLAM using Visual Odometry and Range measurements (CoVOR-SLAM) to overcome this challenge. In the framework of CoVOR-SLAM, robots only need to exchange pose estimates, covariances (uncertainty) of the estimates, and range measurements between robots. Since CoVOR-SLAM does not require to associate visual features and map points observed by different agents, the computational and communication loads are significantly reduced. The required range measurements can be obtained using pilot signals of the communication system, without requiring complex additional infrastructure. We tested CoVOR-SLAM using real images as well as real ultra-wideband-based ranges obtained with two rovers. In addition, CoVOR-SLAM is evaluated with a larger scale multi-agent setup exploiting public image datasets and ranges generated using a realistic simulation. The results show that CoVOR-SLAM can accurately estimate the robots' poses, requiring much less computational power and communication capabilities than the inter-agent loop closing technique.
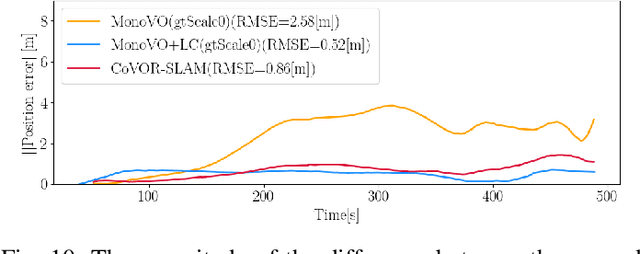
Fusion of Monocular Vision and Radio-based Ranging for Global Scale Estimation and Drift Mitigation
Oct 02, 2018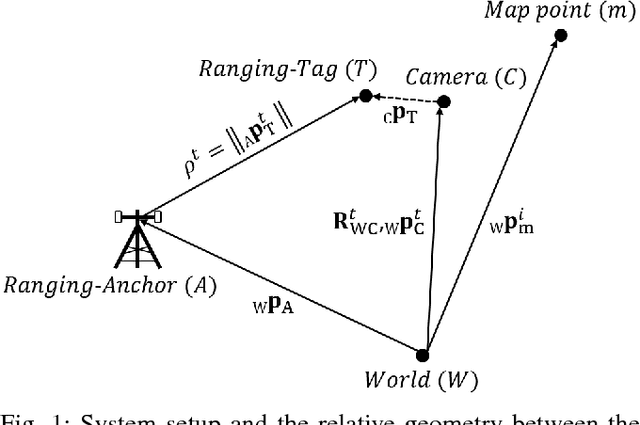

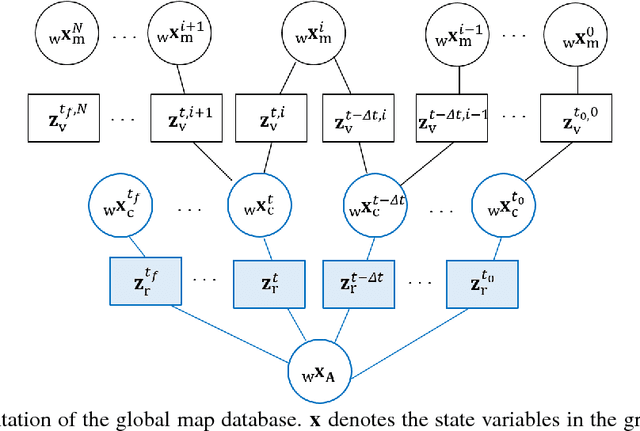
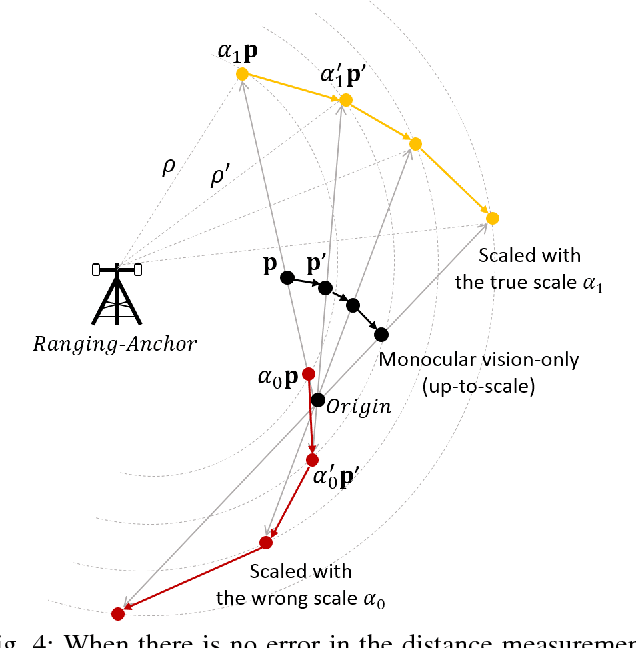
Monocular vision-based Simultaneous Localization and Mapping (SLAM) is used for various purposes due to its advantages in cost, simple setup, as well as availability in the environments where navigation with satellites is not effective. However, camera motion and map points can be estimated only up to a global scale factor with monocular vision. Moreover, estimation error accumulates over time without bound, if the camera cannot detect the previously observed map points for closing a loop. We propose an innovative approach to estimate a global scale factor and reduce drifts in monocular vision-based localization with an additional single ranging link. Our method can be easily integrated with the back-end of monocular visual SLAM methods. We demonstrate our algorithm with real datasets collected on a rover, and show the evaluation results.