 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Efficient and Multi-Modal Navigation System with One-Step World Model
Jan 18, 2026Navigation is a fundamental capability for mobile robots. While the current trend is to use learning-based approaches to replace traditional geometry-based methods, existing end-to-end learning-based policies often struggle with 3D spatial reasoning and lack a comprehensive understanding of physical world dynamics. Integrating world models-which predict future observations conditioned on given actions-with iterative optimization planning offers a promising solution due to their capacity for imagination and flexibility. However, current navigation world models, typically built on pure transformer architectures, often rely on multi-step diffusion processes and autoregressive frame-by-frame generation. These mechanisms result in prohibitive computational latency, rendering real-time deployment impossible. To address this bottleneck, we propose a lightweight navigation world model that adopts a one-step generation paradigm and a 3D U-Net backbone equipped with efficient spatial-temporal attention. This design drastically reduces inference latency, enabling high-frequency control while achieving superior predictive performance. We also integrate this model into an optimization-based planning framework utilizing anchor-based initialization to handle multi-modal goal navigation tasks. Extensive closed-loop experiments in both simulation and real-world environments demonstrate our system's superior efficiency and robustness compared to state-of-the-art baselines.
Implicit Kinodynamic Motion Retargeting for Human-to-humanoid Imitation Learning
Sep 18, 2025Human-to-humanoid imitation learning aims to learn a humanoid whole-body controller from human motion. Motion retargeting is a crucial step in enabling robots to acquire reference trajectories when exploring locomotion skills. However, current methods focus on motion retargeting frame by frame, which lacks scalability. Could we directly convert large-scale human motion into robot-executable motion through a more efficient approach? To address this issue, we propose Implicit Kinodynamic Motion Retargeting (IKMR), a novel efficient and scalable retargeting framework that considers both kinematics and dynamics. In kinematics, IKMR pretrains motion topology feature representation and a dual encoder-decoder architecture to learn a motion domain mapping. In dynamics, IKMR integrates imitation learning with the motion retargeting network to refine motion into physically feasible trajectories. After fine-tuning using the tracking results, IKMR can achieve large-scale physically feasible motion retargeting in real time, and a whole-body controller could be directly trained and deployed for tracking its retargeted trajectories. We conduct our experiments both in the simulator and the real robot on a full-size humanoid robot. Extensive experiments and evaluation results verify the effectiveness of our proposed framework.
State Estimation Transformers for Agile Legged Locomotion
Oct 17, 2024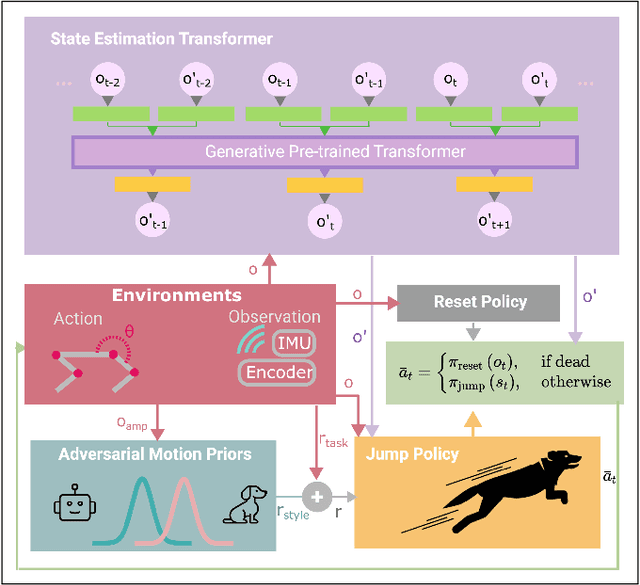
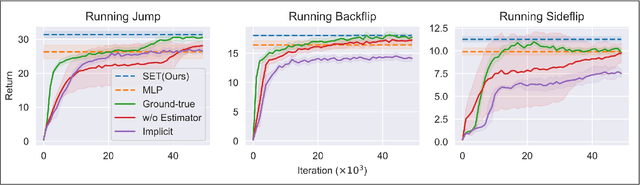
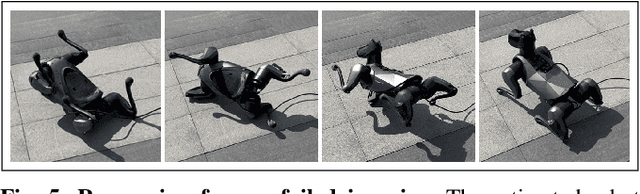
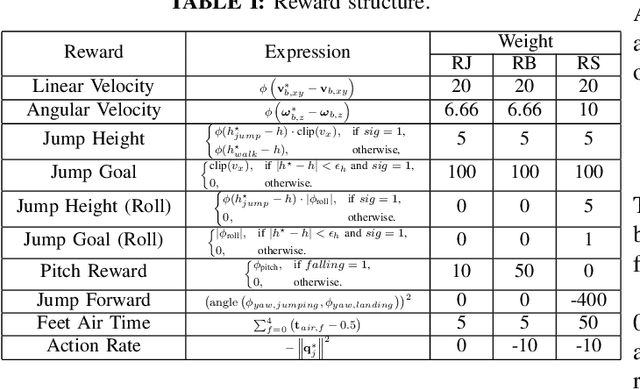
We propose a state estimation method that can accurately predict the robot's privileged states to push the limits of quadruped robots in executing advanced skills such as jumping in the wild. In particular, we present the State Estimation Transformers (SET), an architecture that casts the state estimation problem as conditional sequence modeling. SET outputs the robot states that are hard to obtain directly in the real world, such as the body height and velocities, by leveraging a causally masked Transformer. By conditioning an autoregressive model on the robot's past states, our SET model can predict these privileged observations accurately even in highly dynamic locomotions. We evaluate our methods on three tasks -- running jumping, running backflipping, and running sideslipping -- on a low-cost quadruped robot, Cyberdog2. Results show that SET can outperform other methods in estimation accuracy and transferability in the simulation as well as success rates of jumping and triggering a recovery controller in the real world, suggesting the superiority of such a Transformer-based explicit state estimator in highly dynamic locomotion tasks.