 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFPC-VLA: A Vision-Language-Action Framework with a Supervisor for Failure Prediction and Correction
Sep 04, 2025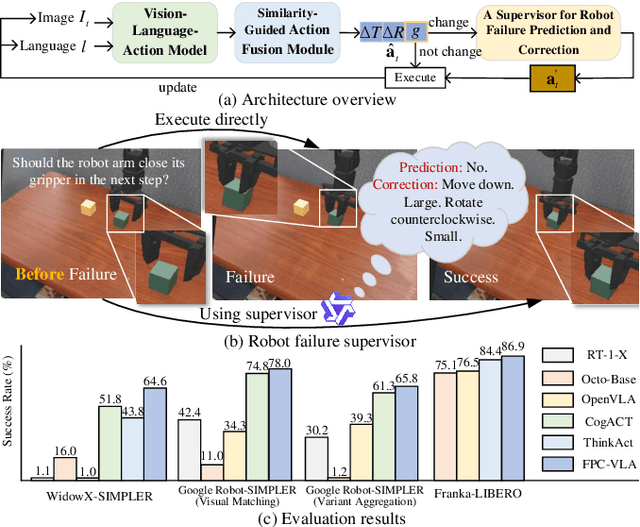
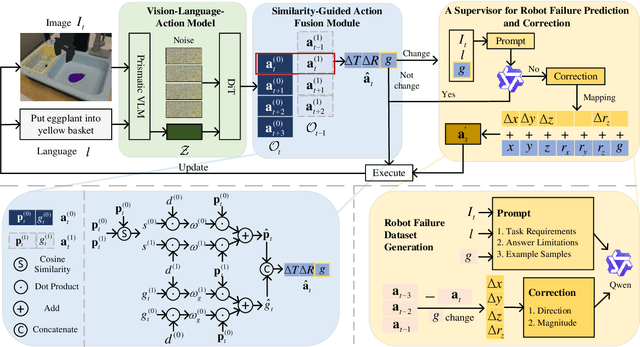
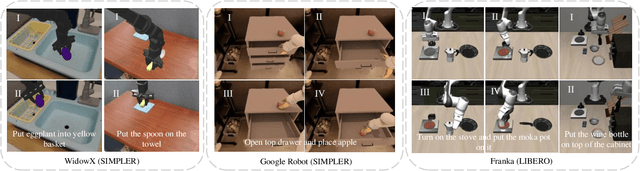
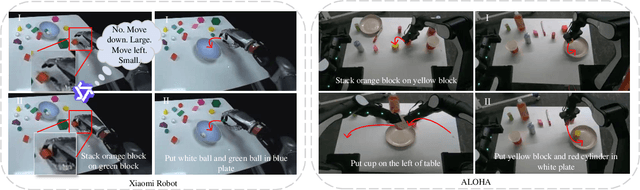
Robotic manipulation is a fundamental component of automation. However, traditional perception-planning pipelines often fall short in open-ended tasks due to limited flexibility, while the architecture of a single end-to-end Vision-Language-Action (VLA) offers promising capabilities but lacks crucial mechanisms for anticipating and recovering from failure. To address these challenges, we propose FPC-VLA, a dual-model framework that integrates VLA with a supervisor for failure prediction and correction. The supervisor evaluates action viability through vision-language queries and generates corrective strategies when risks arise, trained efficiently without manual labeling. A similarity-guided fusion module further refines actions by leveraging past predictions. Evaluation results on multiple simulation platforms (SIMPLER and LIBERO) and robot embodiments (WidowX, Google Robot, Franka) show that FPC-VLA outperforms state-of-the-art models in both zero-shot and fine-tuned settings. By activating the supervisor only at keyframes, our approach significantly increases task success rates with minimal impact on execution time. Successful real-world deployments on diverse, long-horizon tasks confirm FPC-VLA's strong generalization and practical utility for building more reliable autonomous systems.
State Estimation Transformers for Agile Legged Locomotion
Oct 17, 2024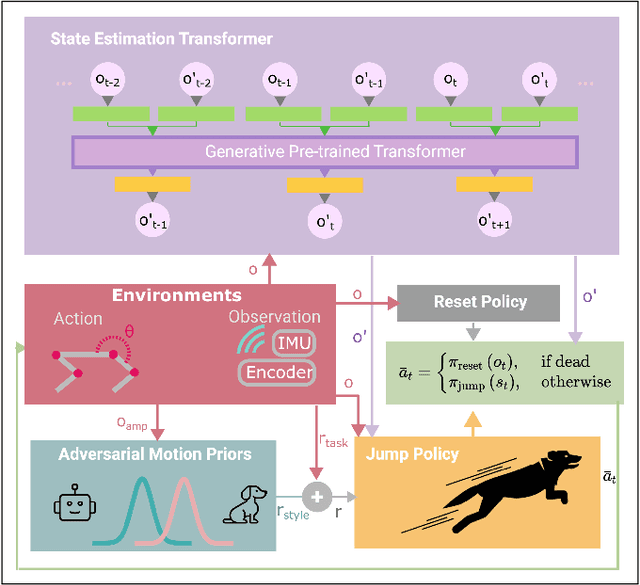
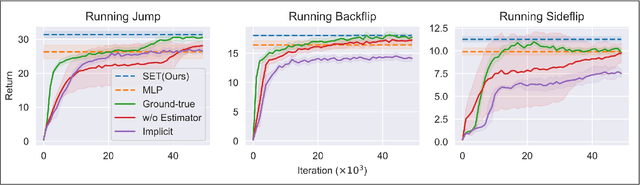
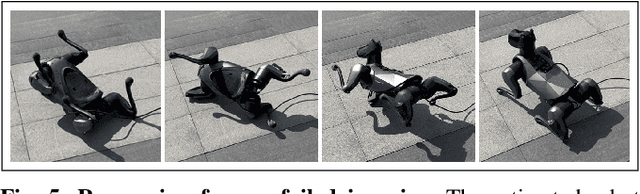
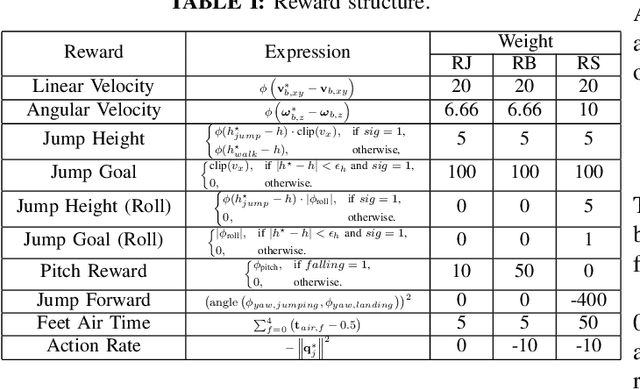
We propose a state estimation method that can accurately predict the robot's privileged states to push the limits of quadruped robots in executing advanced skills such as jumping in the wild. In particular, we present the State Estimation Transformers (SET), an architecture that casts the state estimation problem as conditional sequence modeling. SET outputs the robot states that are hard to obtain directly in the real world, such as the body height and velocities, by leveraging a causally masked Transformer. By conditioning an autoregressive model on the robot's past states, our SET model can predict these privileged observations accurately even in highly dynamic locomotions. We evaluate our methods on three tasks -- running jumping, running backflipping, and running sideslipping -- on a low-cost quadruped robot, Cyberdog2. Results show that SET can outperform other methods in estimation accuracy and transferability in the simulation as well as success rates of jumping and triggering a recovery controller in the real world, suggesting the superiority of such a Transformer-based explicit state estimator in highly dynamic locomotion tasks.
Navigation with Tactile Sensor for Natural Human-Robot Interaction
Nov 23, 2022



Tactile sensors have been introduced to a wide range of robotic tasks such as robot manipulation to mimic the sense of human touch. However, there has only been a few works that integrate tactile sensing into robot navigation. This paper describes a navigation system which allows robots to operate in crowded human-dense environments and behave with socially acceptable reactions by utilizing semantic and force information collected by embedded tactile sensors, RGB-D camera and LiDAR. Compliance control is implemented based on artificial potential fields considering not only laser scan but also force reading from tactile sensors which promises a fast and reliable response to any possible collision. In contrast to cameras, LiDAR and other non-contact sensors, tactile sensors can directly interact with humans and can be used to accept social cues akin to natural human behavior under the same situation. Furthermore, leveraging semantic segmentation from vision module, the robot is able to identify and, therefore assign varying social cost to different groups of humans enabling for socially conscious path planning. At the end of this paper, the proposed control strategy was validated successfully by testing several scenarios on an omni-directional robot in real world.
Contact-Implicit Trajectory Optimization using an Analytically Solvable Contact Model for Locomotion on Variable Ground
Jul 22, 2020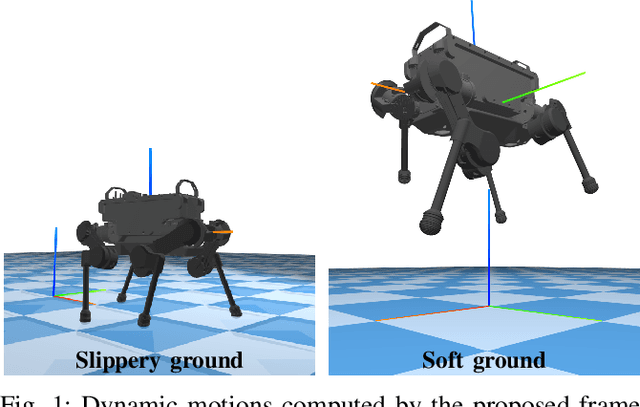
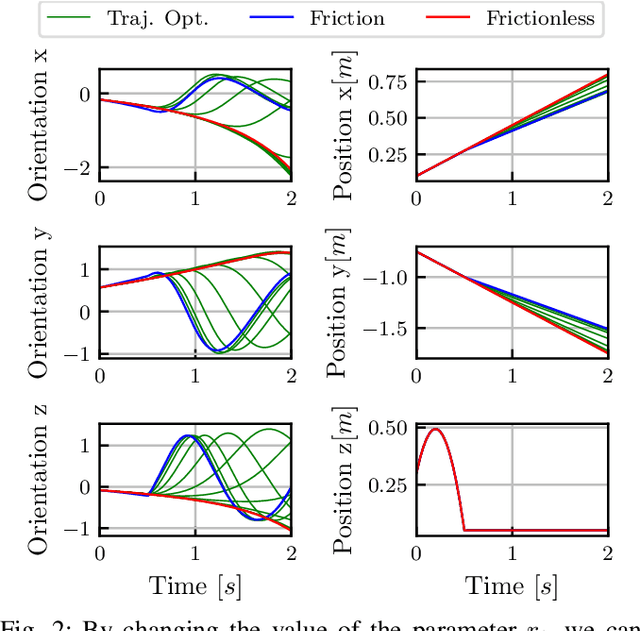
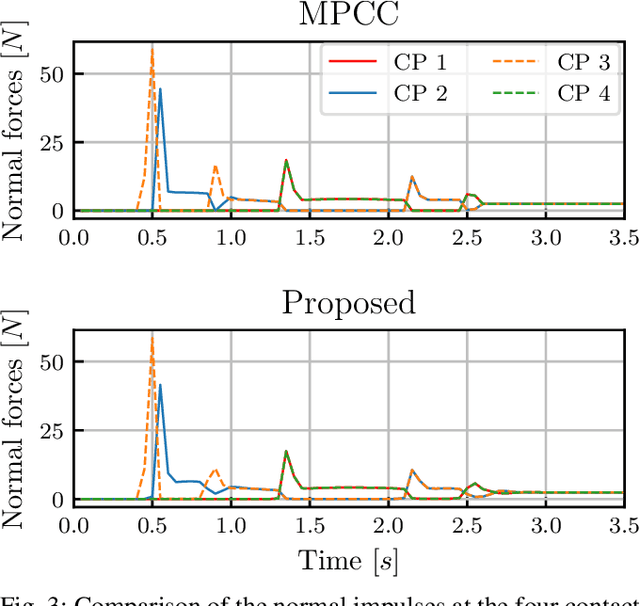
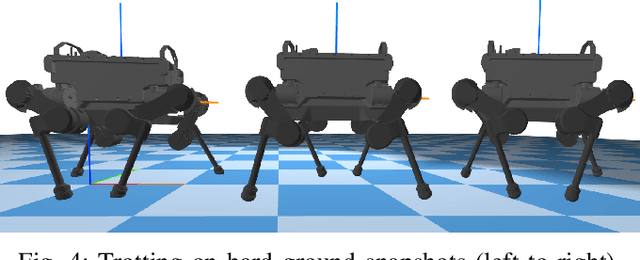
This paper presents a novel contact-implicit trajectory optimization method using an analytically solvable contact model to enable planning of interactions with hard, soft, and slippery environments. Specifically, we propose a novel contact model that can be computed in closed-form, satisfies friction cone constraints and can be embedded into direct trajectory optimization frameworks without complementarity constraints. The closed-form solution decouples the computation of the contact forces from other actuation forces and this property is used to formulate a minimal direct optimization problem expressed with configuration variables only. Our simulation study demonstrates the advantages over the rigid contact model and a trajectory optimization approach based on complementarity constraints. The proposed model enables physics-based optimization for a wide range of interactions with hard, slippery, and soft grounds in a unified manner expressed by two parameters only. By computing trotting and jumping motions for a quadruped robot, the proposed optimization demonstrates the versatility for multi-contact motion planning on surfaces with different physical properties.