 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWearable Travel Aid for Environment Perception and Navigation of Visually Impaired People
Apr 30, 2019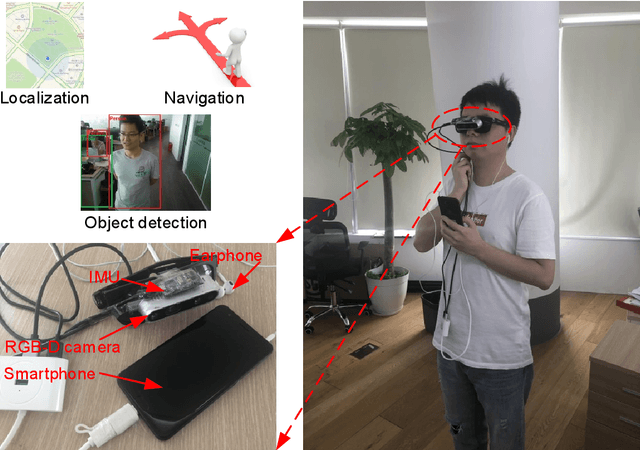
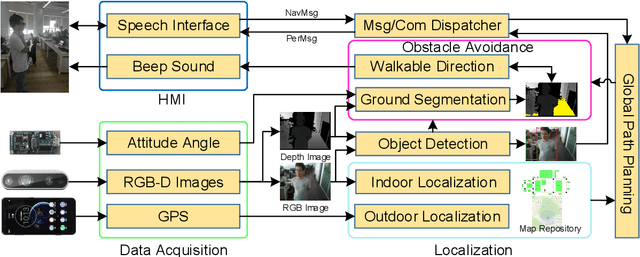
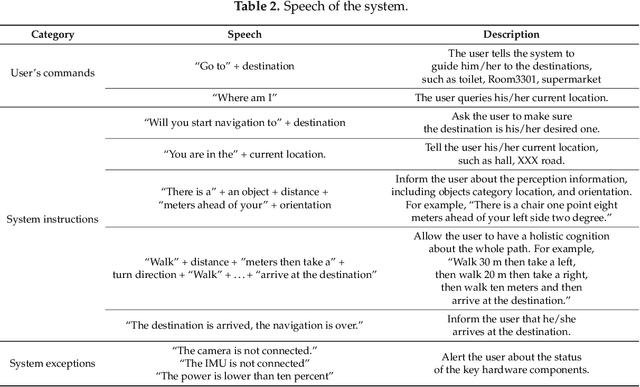
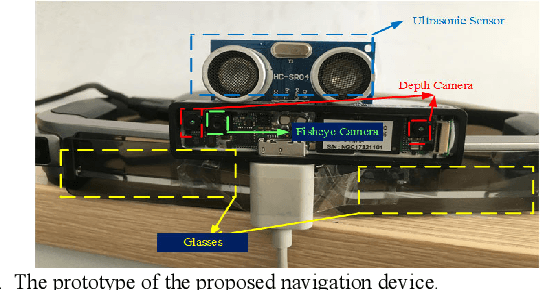
This paper presents a wearable assistive device with the shape of a pair of eyeglasses that allows visually impaired people to navigate safely and quickly in unfamiliar environment, as well as perceive the complicated environment to automatically make decisions on the direction to move. The device uses a consumer Red, Green, Blue and Depth (RGB-D) camera and an Inertial Measurement Unit (IMU) to detect obstacles. As the device leverages the ground height continuity among adjacent image frames, it is able to segment the ground from obstacles accurately and rapidly. Based on the detected ground, the optimal walkable direction is computed and the user is then informed via converted beep sound. Moreover, by utilizing deep learning techniques, the device can semantically categorize the detected obstacles to improve the users' perception of surroundings. It combines a Convolutional Neural Network (CNN) deployed on a smartphone with a depth-image-based object detection to decide what the object type is and where the object is located, and then notifies the user of such information via speech. We evaluated the device's performance with different experiments in which 20 visually impaired people were asked to wear the device and move in an office, and found that they were able to avoid obstacle collisions and find the way in complicated scenarios.
Deep Learning Based Robot for Automatically Picking up Garbage on the Grass
Apr 30, 2019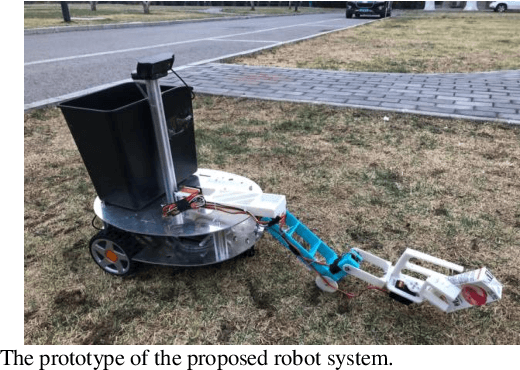

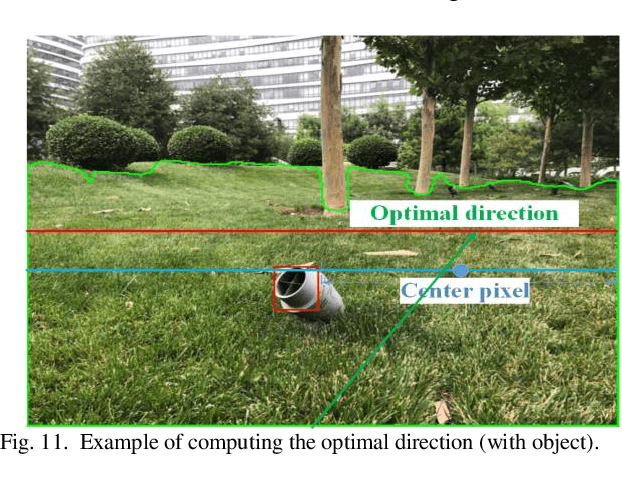

This paper presents a novel garbage pickup robot which operates on the grass. The robot is able to detect the garbage accurately and autonomously by using a deep neural network for garbage recognition. In addition, with the ground segmentation using a deep neural network, a novel navigation strategy is proposed to guide the robot to move around. With the garbage recognition and automatic navigation functions, the robot can clean garbage on the ground in places like parks or schools efficiently and autonomously. Experimental results show that the garbage recognition accuracy can reach as high as 95%, and even without path planning, the navigation strategy can reach almost the same cleaning efficiency with traditional methods. Thus, the proposed robot can serve as a good assistance to relieve dustman's physical labor on garbage cleaning tasks.
Virtual-Blind-Road Following Based Wearable Navigation Device for Blind People
Apr 30, 2019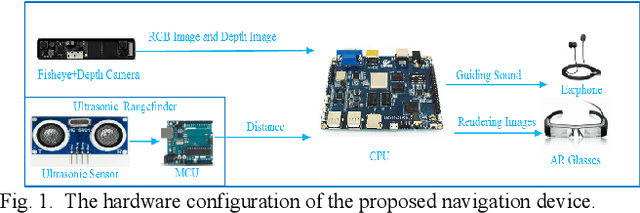

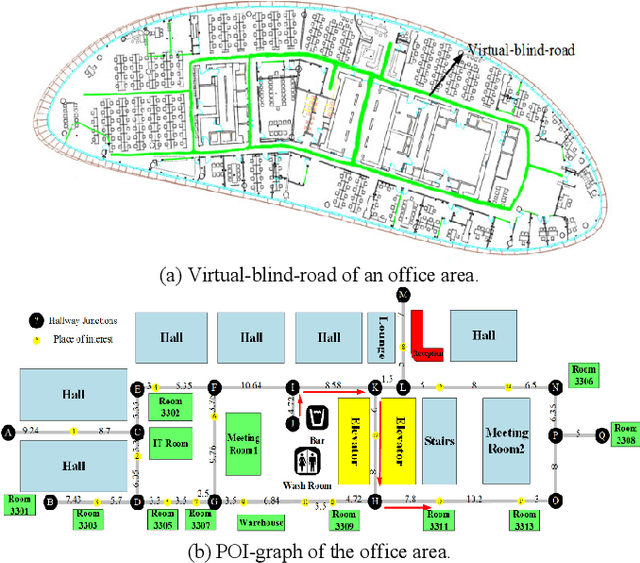
To help the blind people walk to the destination efficiently and safely in indoor environment, a novel wearable navigation device is presented in this paper. The locating, way-finding, route following and obstacle avoiding modules are the essential components in a navigation system, while it remains a challenging task to consider obstacle avoiding during route following, as the indoor environment is complex, changeable and possibly with dynamic objects. To address this issue, we propose a novel scheme which utilizes a dynamic sub-goal selecting strategy to guide the users to the destination and help them bypass obstacles at the same time. This scheme serves as the key component of a complete navigation system deployed on a pair of wearable optical see-through glasses for the ease of use of blind people's daily walks. The proposed navigation device has been tested on a collection of individuals and proved to be effective on indoor navigation tasks. The sensors embedded are of low cost, small volume and easy integration, making it possible for the glasses to be widely used as a wearable consumer device.