 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Learning Based Robot for Automatically Picking up Garbage on the Grass
Paper and Code
Apr 30, 2019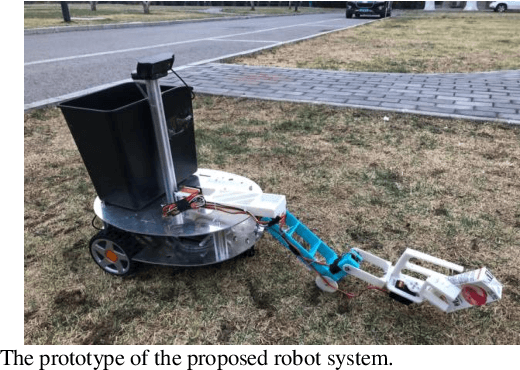

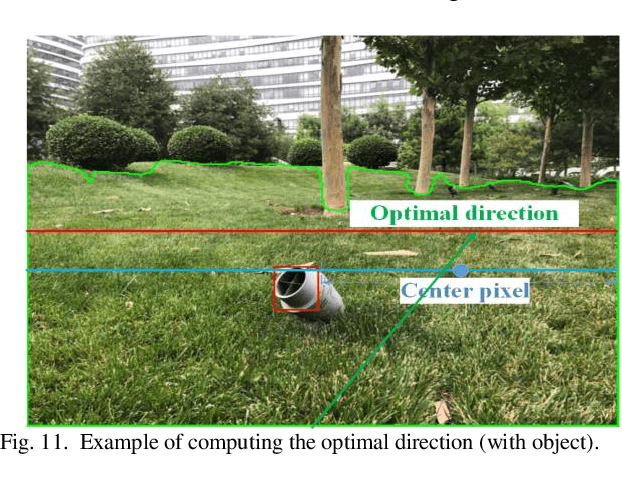

This paper presents a novel garbage pickup robot which operates on the grass. The robot is able to detect the garbage accurately and autonomously by using a deep neural network for garbage recognition. In addition, with the ground segmentation using a deep neural network, a novel navigation strategy is proposed to guide the robot to move around. With the garbage recognition and automatic navigation functions, the robot can clean garbage on the ground in places like parks or schools efficiently and autonomously. Experimental results show that the garbage recognition accuracy can reach as high as 95%, and even without path planning, the navigation strategy can reach almost the same cleaning efficiency with traditional methods. Thus, the proposed robot can serve as a good assistance to relieve dustman's physical labor on garbage cleaning tasks.