 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWearable Travel Aid for Environment Perception and Navigation of Visually Impaired People
Paper and Code
Apr 30, 2019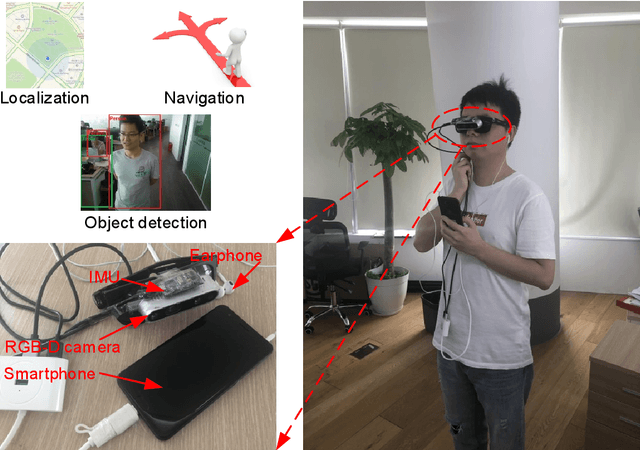
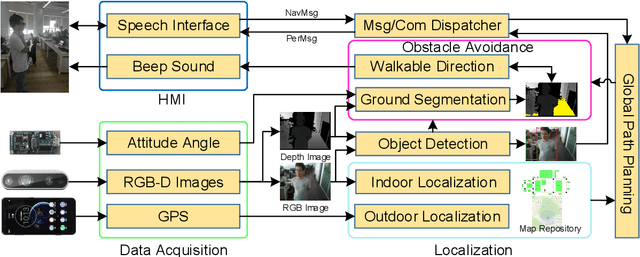
This paper presents a wearable assistive device with the shape of a pair of eyeglasses that allows visually impaired people to navigate safely and quickly in unfamiliar environment, as well as perceive the complicated environment to automatically make decisions on the direction to move. The device uses a consumer Red, Green, Blue and Depth (RGB-D) camera and an Inertial Measurement Unit (IMU) to detect obstacles. As the device leverages the ground height continuity among adjacent image frames, it is able to segment the ground from obstacles accurately and rapidly. Based on the detected ground, the optimal walkable direction is computed and the user is then informed via converted beep sound. Moreover, by utilizing deep learning techniques, the device can semantically categorize the detected obstacles to improve the users' perception of surroundings. It combines a Convolutional Neural Network (CNN) deployed on a smartphone with a depth-image-based object detection to decide what the object type is and where the object is located, and then notifies the user of such information via speech. We evaluated the device's performance with different experiments in which 20 visually impaired people were asked to wear the device and move in an office, and found that they were able to avoid obstacle collisions and find the way in complicated scenarios.