 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReconstructing Physics-Informed Machine Learning for Traffic Flow Modeling: a Multi-Gradient Descent and Pareto Learning Approach
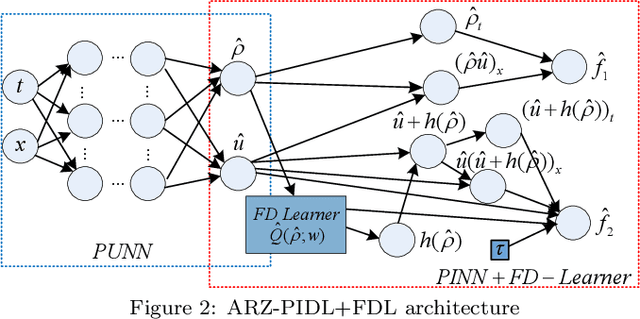
May 19, 2025Physics-informed machine learning (PIML) is crucial in modern traffic flow modeling because it combines the benefits of both physics-based and data-driven approaches. In conventional PIML, physical information is typically incorporated by constructing a hybrid loss function that combines data-driven loss and physics loss through linear scalarization. The goal is to find a trade-off between these two objectives to improve the accuracy of model predictions. However, from a mathematical perspective, linear scalarization is limited to identifying only the convex region of the Pareto front, as it treats data-driven and physics losses as separate objectives. Given that most PIML loss functions are non-convex, linear scalarization restricts the achievable trade-off solutions. Moreover, tuning the weighting coefficients for the two loss components can be both time-consuming and computationally challenging. To address these limitations, this paper introduces a paradigm shift in PIML by reformulating the training process as a multi-objective optimization problem, treating data-driven loss and physics loss independently. We apply several multi-gradient descent algorithms (MGDAs), including traditional multi-gradient descent (TMGD) and dual cone gradient descent (DCGD), to explore the Pareto front in this multi-objective setting. These methods are evaluated on both macroscopic and microscopic traffic flow models. In the macroscopic case, MGDAs achieved comparable performance to traditional linear scalarization methods. Notably, in the microscopic case, MGDAs significantly outperformed their scalarization-based counterparts, demonstrating the advantages of a multi-objective optimization approach in complex PIML scenarios.
Potential failures of physics-informed machine learning in traffic flow modeling: theoretical and experimental analysis
May 16, 2025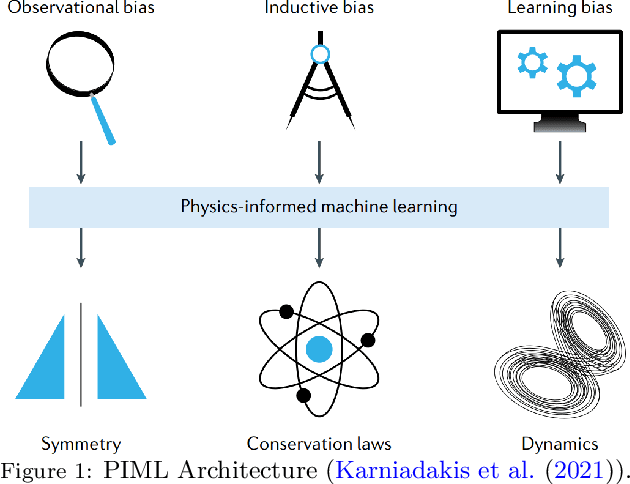

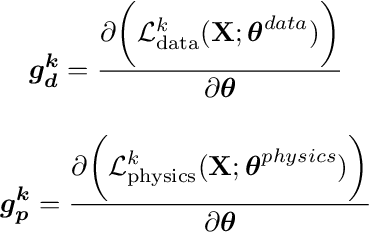
This study critically examines the performance of physics-informed machine learning (PIML) approaches for traffic flow modeling, defining the failure of a PIML model as the scenario where it underperforms both its purely data-driven and purely physics-based counterparts. We analyze the loss landscape by perturbing trained models along the principal eigenvectors of the Hessian matrix and evaluating corresponding loss values. Our results suggest that physics residuals in PIML do not inherently hinder optimization, contrary to a commonly assumed failure cause. Instead, successful parameter updates require both ML and physics gradients to form acute angles with the quasi-true gradient and lie within a conical region. Given inaccuracies in both the physics models and the training data, satisfying this condition is often difficult. Experiments reveal that physical residuals can degrade the performance of LWR- and ARZ-based PIML models, especially under highly physics-driven settings. Moreover, sparse sampling and the use of temporally averaged traffic data can produce misleadingly small physics residuals that fail to capture actual physical dynamics, contributing to model failure. We also identify the Courant-Friedrichs-Lewy (CFL) condition as a key indicator of dataset suitability for PIML, where successful applications consistently adhere to this criterion. Lastly, we observe that higher-order models like ARZ tend to have larger error lower bounds than lower-order models like LWR, which is consistent with the experimental findings of existing studies.
Advanced Longitudinal Control and Collision Avoidance for High-Risk Edge Cases in Autonomous Driving
Apr 26, 2025



Advanced Driver Assistance Systems (ADAS) and Advanced Driving Systems (ADS) are key to improving road safety, yet most existing implementations focus primarily on the vehicle ahead, neglecting the behavior of following vehicles. This shortfall often leads to chain reaction collisions in high speed, densely spaced traffic particularly when a middle vehicle suddenly brakes and trailing vehicles cannot respond in time. To address this critical gap, we propose a novel longitudinal control and collision avoidance algorithm that integrates adaptive cruising with emergency braking. Leveraging deep reinforcement learning, our method simultaneously accounts for both leading and following vehicles. Through a data preprocessing framework that calibrates real-world sensor data, we enhance the robustness and reliability of the training process, ensuring the learned policy can handle diverse driving conditions. In simulated high risk scenarios (e.g., emergency braking in dense traffic), the algorithm effectively prevents potential pile up collisions, even in situations involving heavy duty vehicles. Furthermore, in typical highway scenarios where three vehicles decelerate, the proposed DRL approach achieves a 99% success rate far surpassing the standard Federal Highway Administration speed concepts guide, which reaches only 36.77% success under the same conditions.
Synergizing AI and Digital Twins for Next-Generation Network Optimization, Forecasting, and Security
Mar 08, 2025



Digital network twins (DNTs) are virtual representations of physical networks, designed to enable real-time monitoring, simulation, and optimization of network performance. When integrated with machine learning (ML) techniques, particularly federated learning (FL) and reinforcement learning (RL), DNTs emerge as powerful solutions for managing the complexities of network operations. This article presents a comprehensive analysis of the synergy of DNTs, FL, and RL techniques, showcasing their collective potential to address critical challenges in 6G networks. We highlight key technical challenges that need to be addressed, such as ensuring network reliability, achieving joint data-scenario forecasting, and maintaining security in high-risk environments. Additionally, we propose several pipelines that integrate DNT and ML within coherent frameworks to enhance network optimization and security. Case studies demonstrate the practical applications of our proposed pipelines in edge caching and vehicular networks. In edge caching, the pipeline achieves over 80% cache hit rates while balancing base station loads. In autonomous vehicular system, it ensure a 100% no-collision rate, showcasing its reliability in safety-critical scenarios. By exploring these synergies, we offer insights into the future of intelligent and adaptive network systems that automate decision-making and problem-solving.
Deep Reinforcement Learning for Advanced Longitudinal Control and Collision Avoidance in High-Risk Driving Scenarios
Apr 29, 2024



Existing Advanced Driver Assistance Systems primarily focus on the vehicle directly ahead, often overlooking potential risks from following vehicles. This oversight can lead to ineffective handling of high risk situations, such as high speed, closely spaced, multi vehicle scenarios where emergency braking by one vehicle might trigger a pile up collision. To overcome these limitations, this study introduces a novel deep reinforcement learning based algorithm for longitudinal control and collision avoidance. This proposed algorithm effectively considers the behavior of both leading and following vehicles. Its implementation in simulated high risk scenarios, which involve emergency braking in dense traffic where traditional systems typically fail, has demonstrated the algorithm ability to prevent potential pile up collisions, including those involving heavy duty vehicles.
Using Collision Momentum in Deep Reinforcement Learning Based Adversarial Pedestrian Modeling
Jun 13, 2023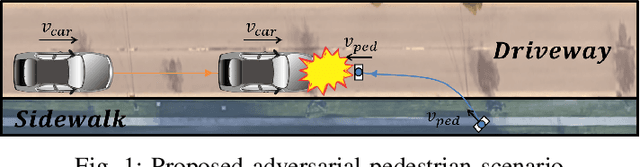

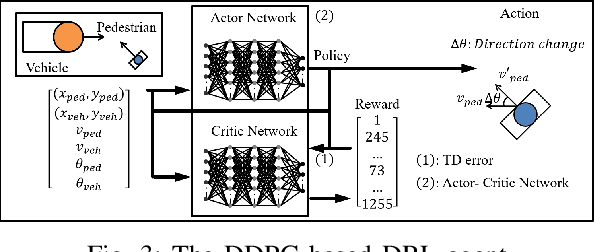
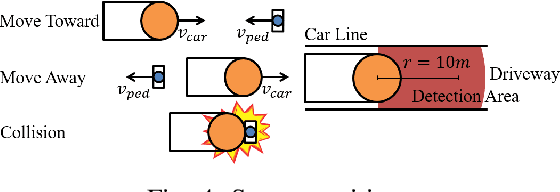
Recent research in pedestrian simulation often aims to develop realistic behaviors in various situations, but it is challenging for existing algorithms to generate behaviors that identify weaknesses in automated vehicles' performance in extreme and unlikely scenarios and edge cases. To address this, specialized pedestrian behavior algorithms are needed. Current research focuses on realistic trajectories using social force models and reinforcement learning based models. However, we propose a reinforcement learning algorithm that specifically targets collisions and better uncovers unique failure modes of automated vehicle controllers. Our algorithm is efficient and generates more severe collisions, allowing for the identification and correction of weaknesses in autonomous driving algorithms in complex and varied scenarios.