 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReconstructing Physics-Informed Machine Learning for Traffic Flow Modeling: a Multi-Gradient Descent and Pareto Learning Approach
May 19, 2025Physics-informed machine learning (PIML) is crucial in modern traffic flow modeling because it combines the benefits of both physics-based and data-driven approaches. In conventional PIML, physical information is typically incorporated by constructing a hybrid loss function that combines data-driven loss and physics loss through linear scalarization. The goal is to find a trade-off between these two objectives to improve the accuracy of model predictions. However, from a mathematical perspective, linear scalarization is limited to identifying only the convex region of the Pareto front, as it treats data-driven and physics losses as separate objectives. Given that most PIML loss functions are non-convex, linear scalarization restricts the achievable trade-off solutions. Moreover, tuning the weighting coefficients for the two loss components can be both time-consuming and computationally challenging. To address these limitations, this paper introduces a paradigm shift in PIML by reformulating the training process as a multi-objective optimization problem, treating data-driven loss and physics loss independently. We apply several multi-gradient descent algorithms (MGDAs), including traditional multi-gradient descent (TMGD) and dual cone gradient descent (DCGD), to explore the Pareto front in this multi-objective setting. These methods are evaluated on both macroscopic and microscopic traffic flow models. In the macroscopic case, MGDAs achieved comparable performance to traditional linear scalarization methods. Notably, in the microscopic case, MGDAs significantly outperformed their scalarization-based counterparts, demonstrating the advantages of a multi-objective optimization approach in complex PIML scenarios.
Potential failures of physics-informed machine learning in traffic flow modeling: theoretical and experimental analysis
May 16, 2025

This study critically examines the performance of physics-informed machine learning (PIML) approaches for traffic flow modeling, defining the failure of a PIML model as the scenario where it underperforms both its purely data-driven and purely physics-based counterparts. We analyze the loss landscape by perturbing trained models along the principal eigenvectors of the Hessian matrix and evaluating corresponding loss values. Our results suggest that physics residuals in PIML do not inherently hinder optimization, contrary to a commonly assumed failure cause. Instead, successful parameter updates require both ML and physics gradients to form acute angles with the quasi-true gradient and lie within a conical region. Given inaccuracies in both the physics models and the training data, satisfying this condition is often difficult. Experiments reveal that physical residuals can degrade the performance of LWR- and ARZ-based PIML models, especially under highly physics-driven settings. Moreover, sparse sampling and the use of temporally averaged traffic data can produce misleadingly small physics residuals that fail to capture actual physical dynamics, contributing to model failure. We also identify the Courant-Friedrichs-Lewy (CFL) condition as a key indicator of dataset suitability for PIML, where successful applications consistently adhere to this criterion. Lastly, we observe that higher-order models like ARZ tend to have larger error lower bounds than lower-order models like LWR, which is consistent with the experimental findings of existing studies.
A Hybrid Physics Machine Learning Approach for Macroscopic Traffic State Estimation
Feb 01, 2022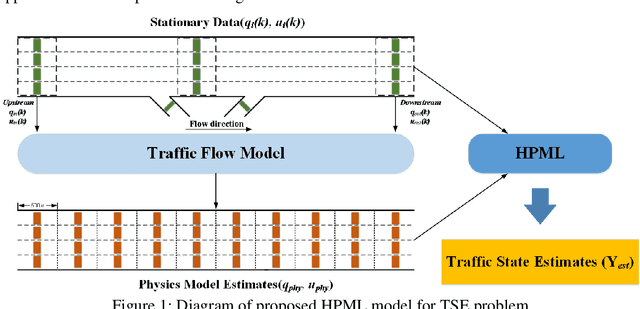
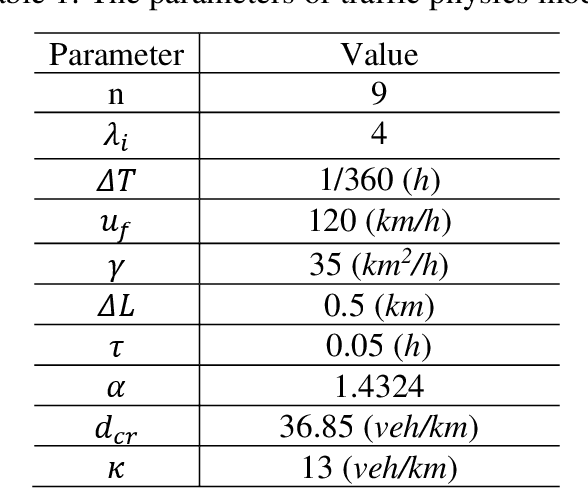
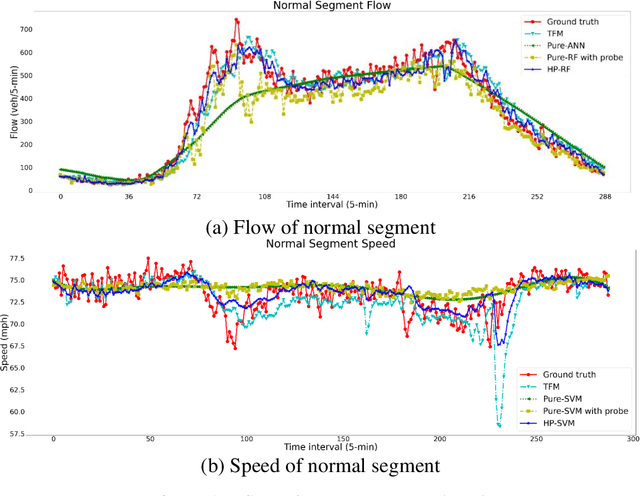
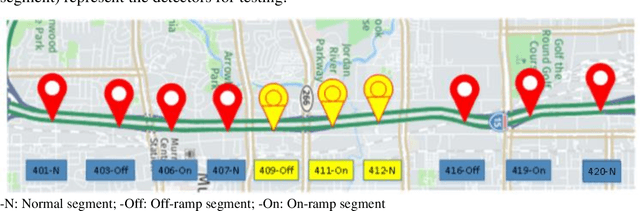
Full-field traffic state information (i.e., flow, speed, and density) is critical for the successful operation of Intelligent Transportation Systems (ITS) on freeways. However, incomplete traffic information tends to be directly collected from traffic detectors that are insufficiently installed in most areas, which is a major obstacle to the popularization of ITS. To tackle this issue, this paper introduces an innovative traffic state estimation (TSE) framework that hybrid regression machine learning techniques (e.g., artificial neural network (ANN), random forest (RF), and support vector machine (SVM)) with a traffic physics model (e.g., second-order macroscopic traffic flow model) using limited information from traffic sensors as inputs to construct accurate and full-field estimated traffic state for freeway systems. To examine the effectiveness of the proposed TSE framework, this paper conducted empirical studies on a real-world data set collected from a stretch of I-15 freeway in Salt Lake City, Utah. Experimental results show that the proposed method has been proved to estimate full-field traffic information accurately. Hence, the proposed method could provide accurate and full-field traffic information, thus providing the basis for the popularization of ITS.
Modeling Stochastic Microscopic Traffic Behaviors: a Physics Regularized Gaussian Process Approach
Jul 17, 2020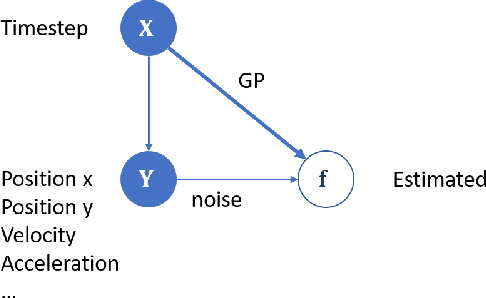

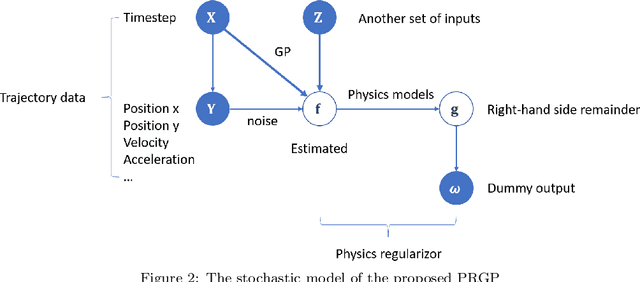
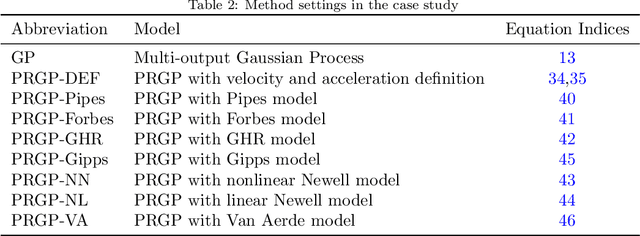
Modeling stochastic traffic behaviors at the microscopic level, such as car-following and lane-changing, is a crucial task to understand the interactions between individual vehicles in traffic streams. Leveraging a recently developed theory named physics regularized Gaussian process (PRGP), this study presents a stochastic microscopic traffic model that can capture the randomness and measure errors in the real world. Physical knowledge from classical car-following models is converted as physics regularizers, in the form of shadow Gaussian process (GP), of a multivariate PRGP for improving the modeling accuracy. More specifically, a Bayesian inference algorithm is developed to estimate the mean and kernel of GPs, and an enhanced latent force model is formulated to encode physical knowledge into stochastic processes. Also, based on the posterior regularization inference framework, an efficient stochastic optimization algorithm is developed to maximize the evidence lower-bound of the system likelihood. To evaluate the performance of the proposed models, this study conducts empirical studies on real-world vehicle trajectories from the NGSIM dataset. Since one unique feature of the proposed framework is the capability of capturing both car-following and lane-changing behaviors with one single model, numerical tests are carried out with two separated datasets, one contains lane-changing maneuvers and the other doesn't. The results show the proposed method outperforms the previous influential methods in estimation precision.
Highway Traffic State Estimation Using Physics Regularized Gaussian Process: Discretized Formulation
Jul 14, 2020

Despite the success of classical traffic flow (e.g., second-order macroscopic) models and data-driven (e.g., Machine Learning - ML) approaches in traffic state estimation, those approaches either require great efforts for parameter calibrations or lack theoretical interpretation. To fill this research gap, this study presents a new modeling framework, named physics regularized Gaussian process (PRGP). This novel approach can encode physics models, i.e., classical traffic flow models, into the Gaussian process architecture and so as to regularize the ML training process. Particularly, this study aims to discuss how to develop a PRGP model when the original physics model is with discrete formulations. Then based on the posterior regularization inference framework, an efficient stochastic optimization algorithm is developed to maximize the evidence lowerbound of the system likelihood. To prove the effectiveness of the proposed model, this paper conducts empirical studies on a real-world dataset that is collected from a stretch of I-15 freeway, Utah. Results show the new PRGP model can outperform the previous compatible methods, such as calibrated physics models and pure machine learning methods, in estimation precision and input robustness.
Macroscopic Traffic Flow Modeling with Physics Regularized Gaussian Process: A New Insight into Machine Learning Applications
Feb 06, 2020
Despite the wide implementation of machine learning (ML) techniques in traffic flow modeling recently, those data-driven approaches often fall short of accuracy in the cases with a small or noisy dataset. To address this issue, this study presents a new modeling framework, named physics regularized machine learning (PRML), to encode classical traffic flow models (referred as physical models) into the ML architecture and to regularize the ML training process. More specifically, a stochastic physics regularized Gaussian process (PRGP) model is developed and a Bayesian inference algorithm is used to estimate the mean and kernel of the PRGP. A physical regularizer based on macroscopic traffic flow models is also developed to augment the estimation via a shadow GP and an enhanced latent force model is used to encode physical knowledge into stochastic processes. Based on the posterior regularization inference framework, an efficient stochastic optimization algorithm is also developed to maximize the evidence lowerbound of the system likelihood. To prove the effectiveness of the proposed model, this paper conducts empirical studies on a real-world dataset which is collected from a stretch of I-15 freeway, Utah. Results show the new PRGP model can outperform the previous compatible methods, such as calibrated pure physical models and pure machine learning methods, in estimation precision and input robustness.