 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiscourse-Aware Emotion Cause Extraction in Conversations
Oct 26, 2022



Emotion Cause Extraction in Conversations (ECEC) aims to extract the utterances which contain the emotional cause in conversations. Most prior research focuses on modelling conversational contexts with sequential encoding, ignoring the informative interactions between utterances and conversational-specific features for ECEC. In this paper, we investigate the importance of discourse structures in handling utterance interactions and conversationspecific features for ECEC. To this end, we propose a discourse-aware model (DAM) for this task. Concretely, we jointly model ECEC with discourse parsing using a multi-task learning (MTL) framework and explicitly encode discourse structures via gated graph neural network (gated GNN), integrating rich utterance interaction information to our model. In addition, we use gated GNN to further enhance our ECEC model with conversation-specific features. Results on the benchmark corpus show that DAM outperform the state-of-theart (SOTA) systems in the literature. This suggests that the discourse structure may contain a potential link between emotional utterances and their corresponding cause expressions. It also verifies the effectiveness of conversationalspecific features. The codes of this paper will be available on GitHub.
Modeling Stochastic Microscopic Traffic Behaviors: a Physics Regularized Gaussian Process Approach
Jul 17, 2020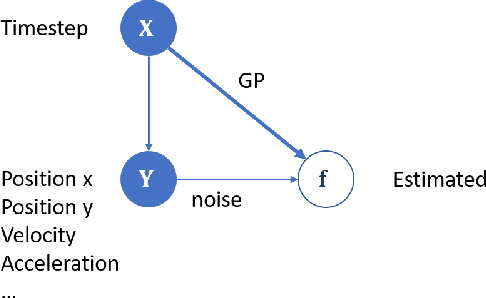

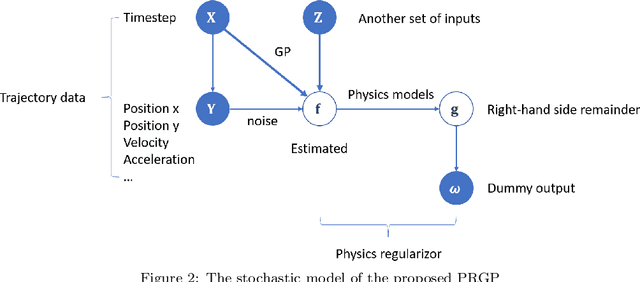
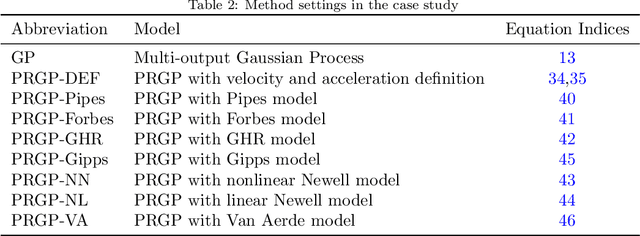
Modeling stochastic traffic behaviors at the microscopic level, such as car-following and lane-changing, is a crucial task to understand the interactions between individual vehicles in traffic streams. Leveraging a recently developed theory named physics regularized Gaussian process (PRGP), this study presents a stochastic microscopic traffic model that can capture the randomness and measure errors in the real world. Physical knowledge from classical car-following models is converted as physics regularizers, in the form of shadow Gaussian process (GP), of a multivariate PRGP for improving the modeling accuracy. More specifically, a Bayesian inference algorithm is developed to estimate the mean and kernel of GPs, and an enhanced latent force model is formulated to encode physical knowledge into stochastic processes. Also, based on the posterior regularization inference framework, an efficient stochastic optimization algorithm is developed to maximize the evidence lower-bound of the system likelihood. To evaluate the performance of the proposed models, this study conducts empirical studies on real-world vehicle trajectories from the NGSIM dataset. Since one unique feature of the proposed framework is the capability of capturing both car-following and lane-changing behaviors with one single model, numerical tests are carried out with two separated datasets, one contains lane-changing maneuvers and the other doesn't. The results show the proposed method outperforms the previous influential methods in estimation precision.
Highway Traffic State Estimation Using Physics Regularized Gaussian Process: Discretized Formulation
Jul 14, 2020

Despite the success of classical traffic flow (e.g., second-order macroscopic) models and data-driven (e.g., Machine Learning - ML) approaches in traffic state estimation, those approaches either require great efforts for parameter calibrations or lack theoretical interpretation. To fill this research gap, this study presents a new modeling framework, named physics regularized Gaussian process (PRGP). This novel approach can encode physics models, i.e., classical traffic flow models, into the Gaussian process architecture and so as to regularize the ML training process. Particularly, this study aims to discuss how to develop a PRGP model when the original physics model is with discrete formulations. Then based on the posterior regularization inference framework, an efficient stochastic optimization algorithm is developed to maximize the evidence lowerbound of the system likelihood. To prove the effectiveness of the proposed model, this paper conducts empirical studies on a real-world dataset that is collected from a stretch of I-15 freeway, Utah. Results show the new PRGP model can outperform the previous compatible methods, such as calibrated physics models and pure machine learning methods, in estimation precision and input robustness.
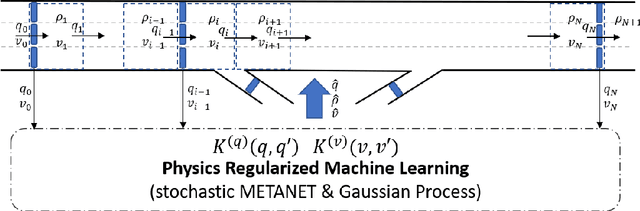
Macroscopic Traffic Flow Modeling with Physics Regularized Gaussian Process: A New Insight into Machine Learning Applications
Feb 06, 2020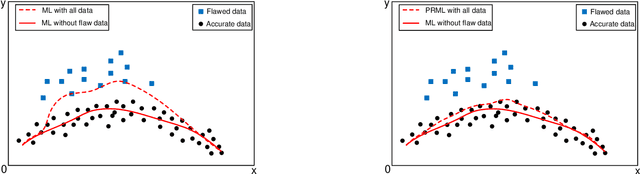
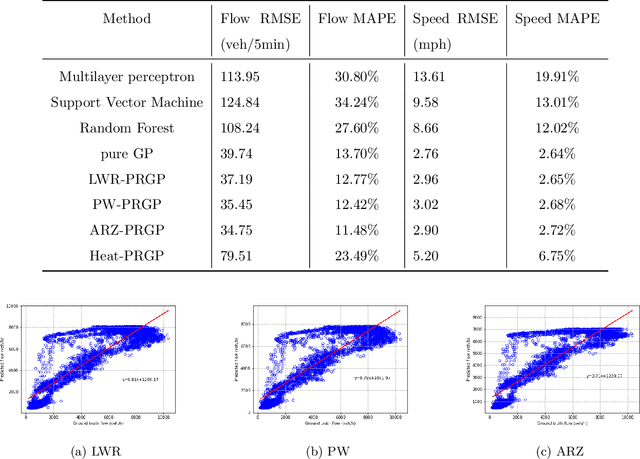
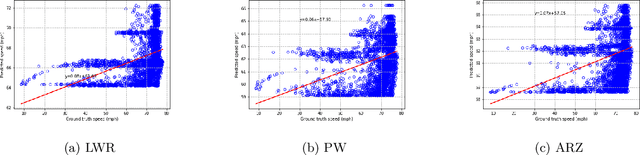
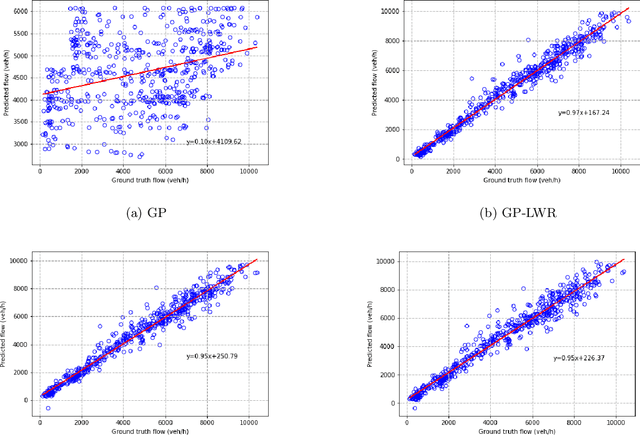
Despite the wide implementation of machine learning (ML) techniques in traffic flow modeling recently, those data-driven approaches often fall short of accuracy in the cases with a small or noisy dataset. To address this issue, this study presents a new modeling framework, named physics regularized machine learning (PRML), to encode classical traffic flow models (referred as physical models) into the ML architecture and to regularize the ML training process. More specifically, a stochastic physics regularized Gaussian process (PRGP) model is developed and a Bayesian inference algorithm is used to estimate the mean and kernel of the PRGP. A physical regularizer based on macroscopic traffic flow models is also developed to augment the estimation via a shadow GP and an enhanced latent force model is used to encode physical knowledge into stochastic processes. Based on the posterior regularization inference framework, an efficient stochastic optimization algorithm is also developed to maximize the evidence lowerbound of the system likelihood. To prove the effectiveness of the proposed model, this paper conducts empirical studies on a real-world dataset which is collected from a stretch of I-15 freeway, Utah. Results show the new PRGP model can outperform the previous compatible methods, such as calibrated pure physical models and pure machine learning methods, in estimation precision and input robustness.