 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUsing Collision Momentum in Deep Reinforcement Learning Based Adversarial Pedestrian Modeling
Paper and Code
Jun 13, 2023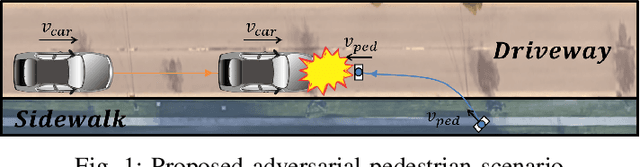

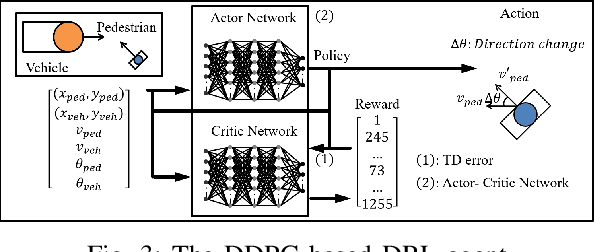
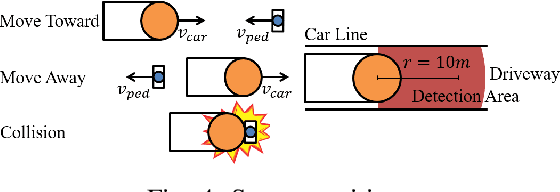
Recent research in pedestrian simulation often aims to develop realistic behaviors in various situations, but it is challenging for existing algorithms to generate behaviors that identify weaknesses in automated vehicles' performance in extreme and unlikely scenarios and edge cases. To address this, specialized pedestrian behavior algorithms are needed. Current research focuses on realistic trajectories using social force models and reinforcement learning based models. However, we propose a reinforcement learning algorithm that specifically targets collisions and better uncovers unique failure modes of automated vehicle controllers. Our algorithm is efficient and generates more severe collisions, allowing for the identification and correction of weaknesses in autonomous driving algorithms in complex and varied scenarios.