 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntegrating Model-based Control and RL for Sim2Real Transfer of Tight Insertion Policies
May 17, 2025Object insertion under tight tolerances ($< \hspace{-.02in} 1mm$) is an important but challenging assembly task as even small errors can result in undesirable contacts. Recent efforts focused on Reinforcement Learning (RL), which often depends on careful definition of dense reward functions. This work proposes an effective strategy for such tasks that integrates traditional model-based control with RL to achieve improved insertion accuracy. The policy is trained exclusively in simulation and is zero-shot transferred to the real system. It employs a potential field-based controller to acquire a model-based policy for inserting a plug into a socket given full observability in simulation. This policy is then integrated with residual RL, which is trained in simulation given only a sparse, goal-reaching reward. A curriculum scheme over observation noise and action magnitude is used for training the residual RL policy. Both policy components use as input the SE(3) poses of both the plug and the socket and return the plug's SE(3) pose transform, which is executed by a robotic arm using a controller. The integrated policy is deployed on the real system without further training or fine-tuning, given a visual SE(3) object tracker. The proposed solution and alternatives are evaluated across a variety of objects and conditions in simulation and reality. The proposed approach outperforms recent RL-based methods in this domain and prior efforts with hybrid policies. Ablations highlight the impact of each component of the approach.
PROBE: Proprioceptive Obstacle Detection and Estimation while Navigating in Clutter
May 17, 2025In critical applications, including search-and-rescue in degraded environments, blockages can be prevalent and prevent the effective deployment of certain sensing modalities, particularly vision, due to occlusion and the constrained range of view of onboard camera sensors. To enable robots to tackle these challenges, we propose a new approach, Proprioceptive Obstacle Detection and Estimation while navigating in clutter PROBE, which instead relies only on the robot's proprioception to infer the presence or absence of occluded rectangular obstacles while predicting their dimensions and poses in SE(2). The proposed approach is a Transformer neural network that receives as input a history of applied torques and sensed whole-body movements of the robot and returns a parameterized representation of the obstacles in the environment. The effectiveness of PROBE is evaluated on simulated environments in Isaac Gym and with a real Unitree Go1 quadruped robot.
Visuotactile-Based Learning for Insertion with Compliant Hands
Nov 10, 2024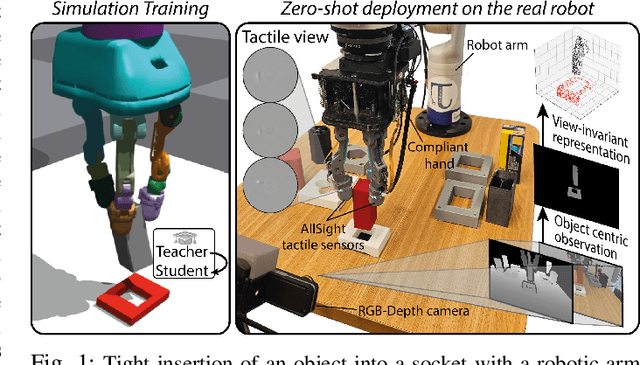
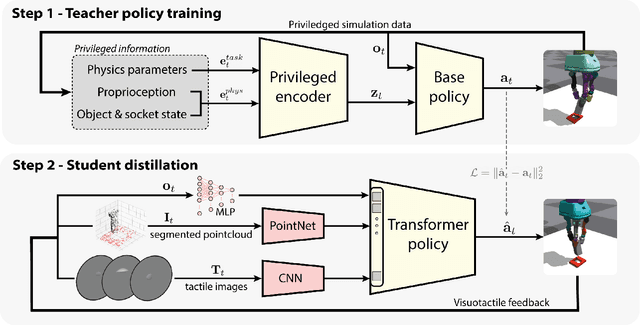
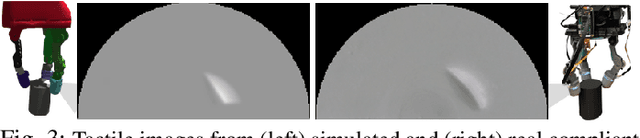
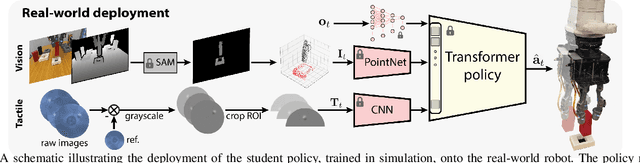
Compared to rigid hands, underactuated compliant hands offer greater adaptability to object shapes, provide stable grasps, and are often more cost-effective. However, they introduce uncertainties in hand-object interactions due to their inherent compliance and lack of precise finger proprioception as in rigid hands. These limitations become particularly significant when performing contact-rich tasks like insertion. To address these challenges, additional sensing modalities are required to enable robust insertion capabilities. This letter explores the essential sensing requirements for successful insertion tasks with compliant hands, focusing on the role of visuotactile perception. We propose a simulation-based multimodal policy learning framework that leverages all-around tactile sensing and an extrinsic depth camera. A transformer-based policy, trained through a teacher-student distillation process, is successfully transferred to a real-world robotic system without further training. Our results emphasize the crucial role of tactile sensing in conjunction with visual perception for accurate object-socket pose estimation, successful sim-to-real transfer and robust task execution.
${\tt KRAFT}$: Sampling-Based Kinodynamic Replanning and Feedback Control over Approximate, Identified Models of Vehicular Systems
Sep 17, 2024This paper aims to increase the safety and reliability of executing trajectories planned for robots with non-trivial dynamics given a light-weight, approximate dynamics model. Scenarios include mobile robots navigating through workspaces with imperfectly modeled surfaces and unknown friction. The proposed approach, Kinodynamic Replanning over Approximate Models with Feedback Tracking (KRAFT), integrates: (i) replanning via an asymptotically optimal sampling-based kinodynamic tree planner, with (ii) trajectory following via feedback control, and (iii) a safety mechanism to reduce collision due to second-order dynamics. The planning and control components use a rough dynamics model expressed analytically via differential equations, which is tuned via system identification (SysId) in a training environment but not the deployed one. This allows the process to be fast and achieve long-horizon reasoning during each replanning cycle. At the same time, the model still includes gaps with reality, even after SysID, in new environments. Experiments demonstrate the limitations of kinematic path planning and path tracking approaches, highlighting the importance of: (a) closing the feedback-loop also at the planning level; and (b) long-horizon reasoning, for safe and efficient trajectory execution given inaccurate models.
Mono-STAR: Mono-camera Scene-level Tracking and Reconstruction
Jan 30, 2023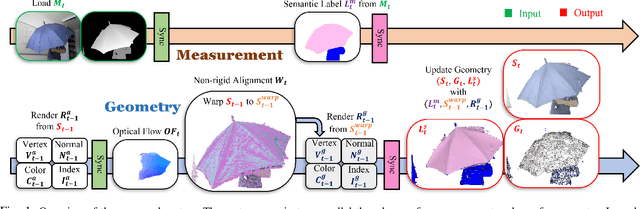
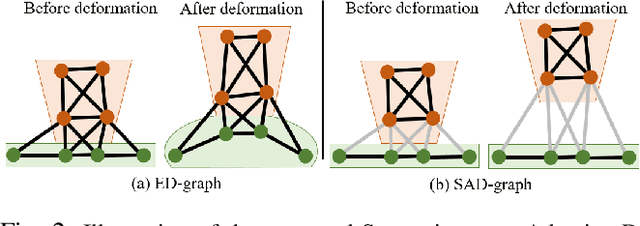
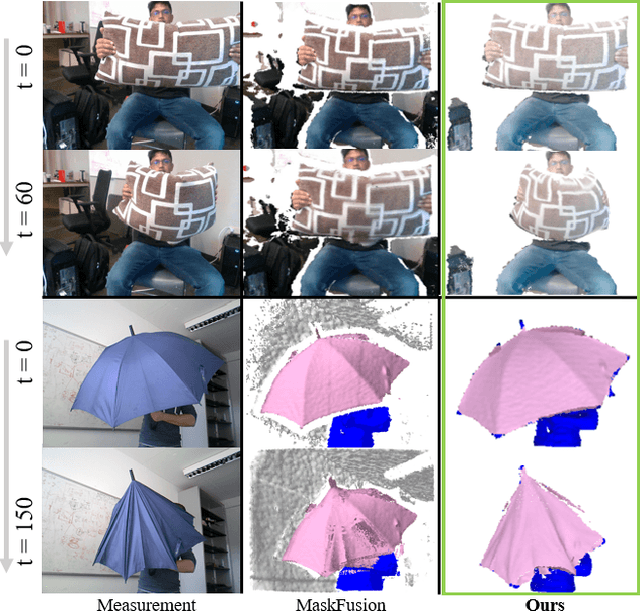
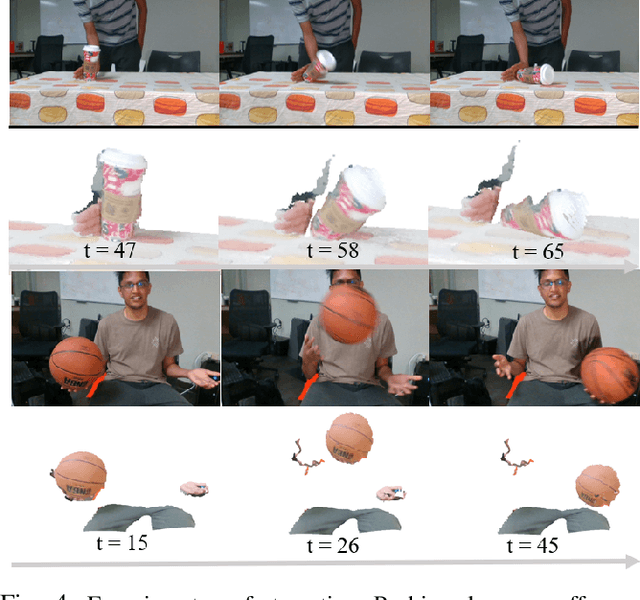
We present Mono-STAR, the first real-time 3D reconstruction system that simultaneously supports semantic fusion, fast motion tracking, non-rigid object deformation, and topological change under a unified framework. The proposed system solves a new optimization problem incorporating optical-flow-based 2D constraints to deal with fast motion and a novel semantic-aware deformation graph (SAD-graph) for handling topology change. We test the proposed system under various challenging scenes and demonstrate that it significantly outperforms existing state-of-the-art methods.