 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmbodiment-Agnostic Navigation Policy Trained with Visual Demonstrations
Dec 28, 2024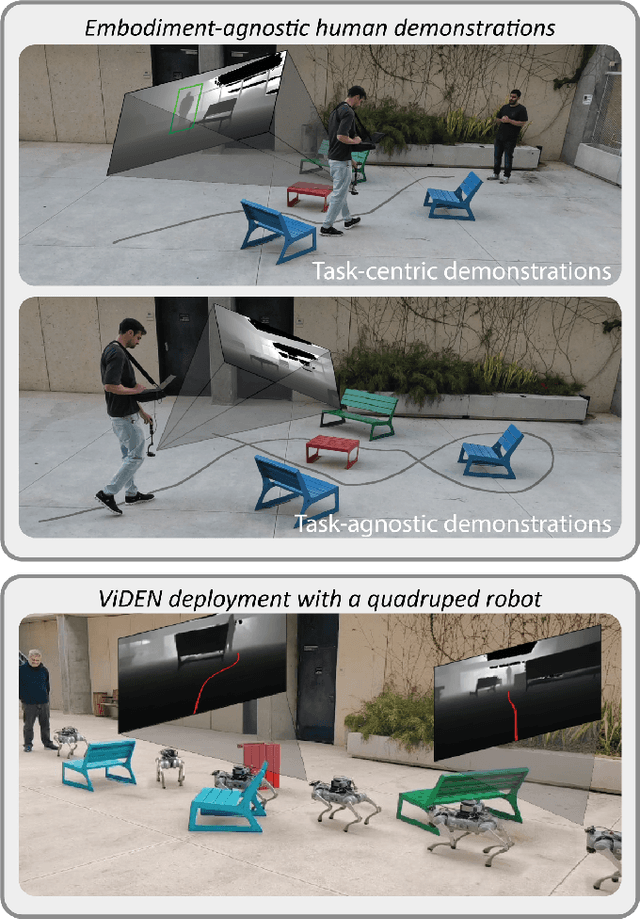
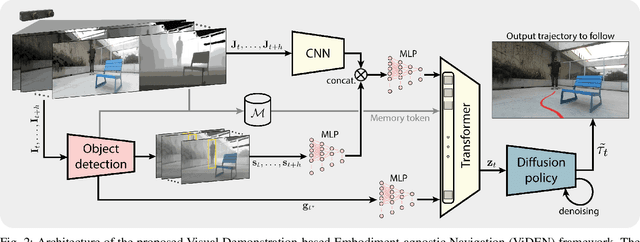
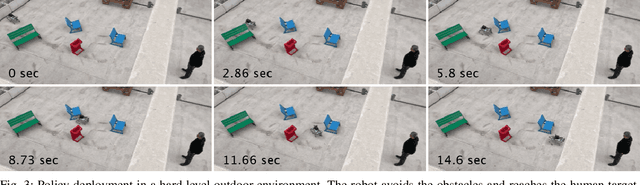
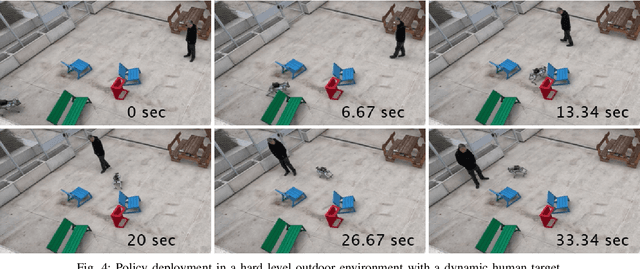
Learning to navigate in unstructured environments is a challenging task for robots. While reinforcement learning can be effective, it often requires extensive data collection and can pose risk. Learning from expert demonstrations, on the other hand, offers a more efficient approach. However, many existing methods rely on specific robot embodiments, pre-specified target images and require large datasets. We propose the Visual Demonstration-based Embodiment-agnostic Navigation (ViDEN) framework, a novel framework that leverages visual demonstrations to train embodiment-agnostic navigation policies. ViDEN utilizes depth images to reduce input dimensionality and relies on relative target positions, making it more adaptable to diverse environments. By training a diffusion-based policy on task-centric and embodiment-agnostic demonstrations, ViDEN can generate collision-free and adaptive trajectories in real-time. Our experiments on human reaching and tracking demonstrate that ViDEN outperforms existing methods, requiring a small amount of data and achieving superior performance in various indoor and outdoor navigation scenarios. Project website: https://nimicurtis.github.io/ViDEN/.
Visuotactile-Based Learning for Insertion with Compliant Hands
Nov 10, 2024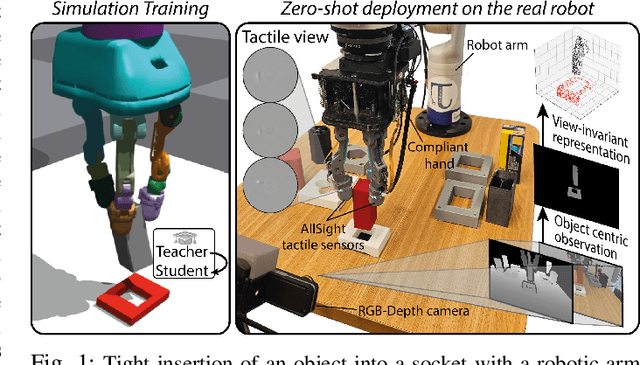
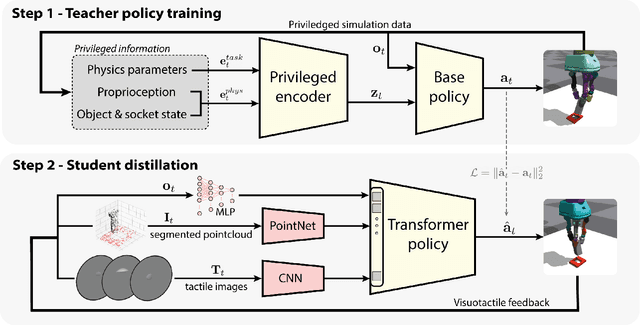
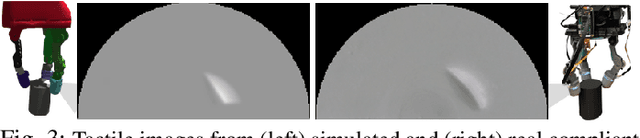
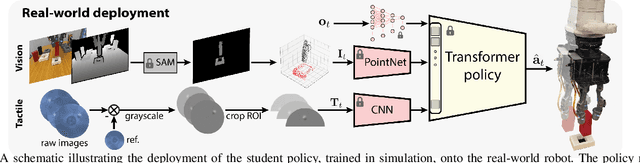
Compared to rigid hands, underactuated compliant hands offer greater adaptability to object shapes, provide stable grasps, and are often more cost-effective. However, they introduce uncertainties in hand-object interactions due to their inherent compliance and lack of precise finger proprioception as in rigid hands. These limitations become particularly significant when performing contact-rich tasks like insertion. To address these challenges, additional sensing modalities are required to enable robust insertion capabilities. This letter explores the essential sensing requirements for successful insertion tasks with compliant hands, focusing on the role of visuotactile perception. We propose a simulation-based multimodal policy learning framework that leverages all-around tactile sensing and an extrinsic depth camera. A transformer-based policy, trained through a teacher-student distillation process, is successfully transferred to a real-world robotic system without further training. Our results emphasize the crucial role of tactile sensing in conjunction with visual perception for accurate object-socket pose estimation, successful sim-to-real transfer and robust task execution.
Augmenting Tactile Simulators with Real-like and Zero-Shot Capabilities
Sep 19, 2023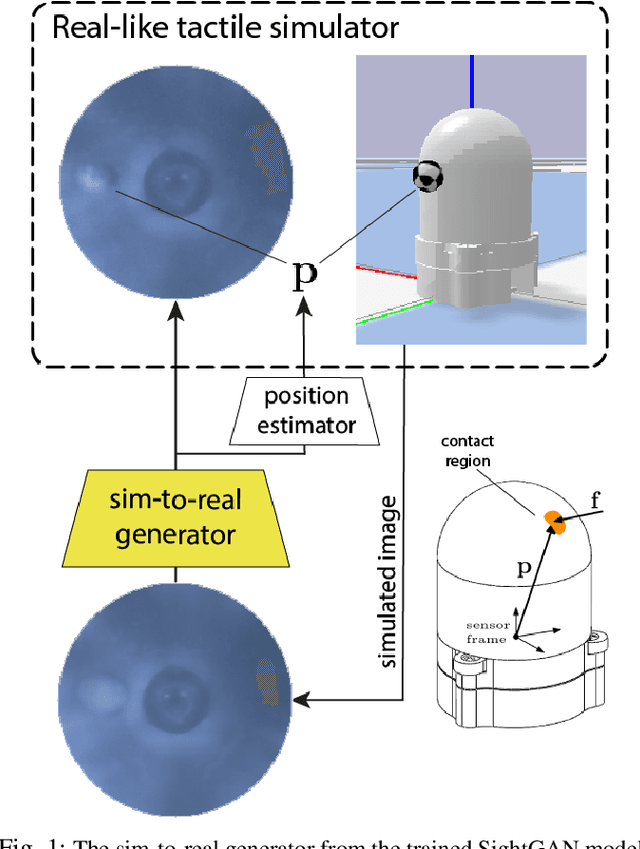
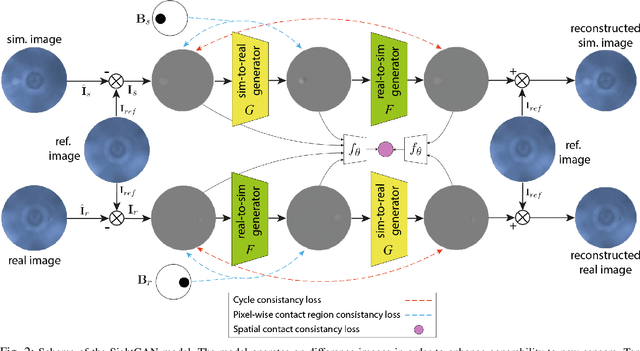
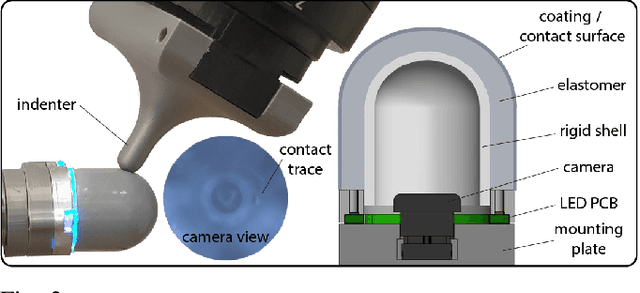
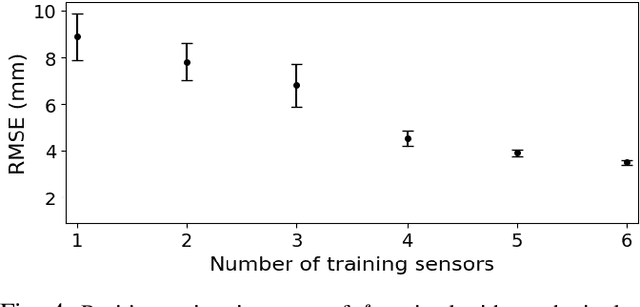
Simulating tactile perception could potentially leverage the learning capabilities of robotic systems in manipulation tasks. However, the reality gap of simulators for high-resolution tactile sensors remains large. Models trained on simulated data often fail in zero-shot inference and require fine-tuning with real data. In addition, work on high-resolution sensors commonly focus on ones with flat surfaces while 3D round sensors are essential for dexterous manipulation. In this paper, we propose a bi-directional Generative Adversarial Network (GAN) termed SightGAN. SightGAN relies on the early CycleGAN while including two additional loss components aimed to accurately reconstruct background and contact patterns including small contact traces. The proposed SightGAN learns real-to-sim and sim-to-real processes over difference images. It is shown to generate real-like synthetic images while maintaining accurate contact positioning. The generated images can be used to train zero-shot models for newly fabricated sensors. Consequently, the resulted sim-to-real generator could be built on top of the tactile simulator to provide a real-world framework. Potentially, the framework can be used to train, for instance, reinforcement learning policies of manipulation tasks. The proposed model is verified in extensive experiments with test data collected from real sensors and also shown to maintain embedded force information within the tactile images.
AllSight: A Low-Cost and High-Resolution Round Tactile Sensor with Zero-Shot Learning Capability
Jul 06, 2023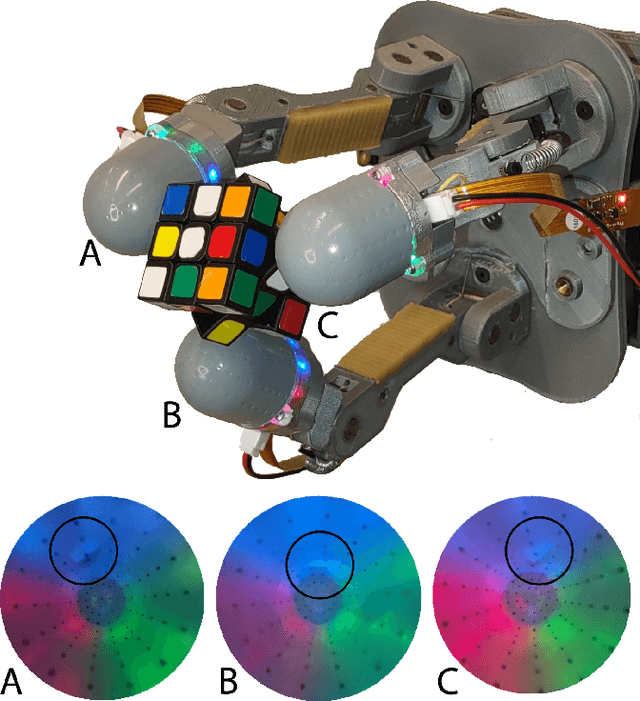
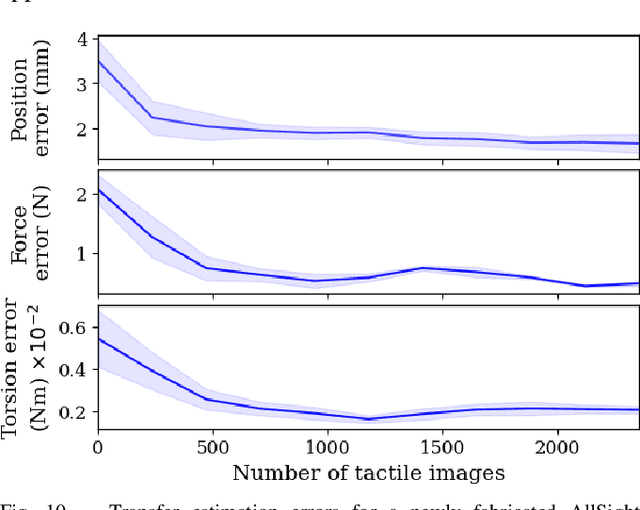
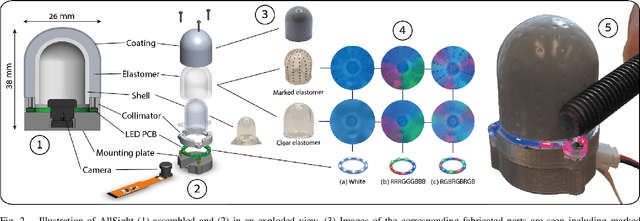
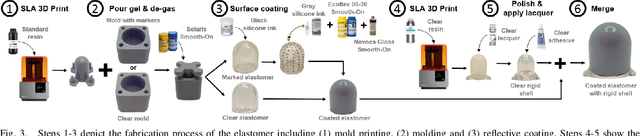
Tactile sensing is a necessary capability for a robotic hand to perform fine manipulations and interact with the environment. Optical sensors are a promising solution for high-resolution contact estimation. Nevertheless, they are usually not easy to fabricate and require individual calibration in order to acquire sufficient accuracy. In this letter, we propose AllSight, an optical tactile sensor with a round 3D structure potentially designed for robotic in-hand manipulation tasks. AllSight is mostly 3D printed making it low-cost, modular, durable and in the size of a human thumb while with a large contact surface. We show the ability of AllSight to learn and estimate a full contact state, i.e., contact position, forces and torsion. With that, an experimental benchmark between various configurations of illumination and contact elastomers are provided. Furthermore, the robust design of AllSight provides it with a unique zero-shot capability such that a practitioner can fabricate the open-source design and have a ready-to-use state estimation model. A set of experiments demonstrates the accurate state estimation performance of AllSight.