Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMono-STAR: Mono-camera Scene-level Tracking and Reconstruction
Jan 30, 2023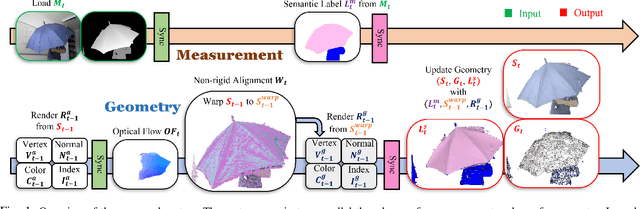
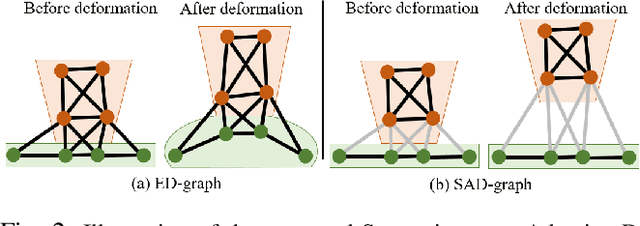
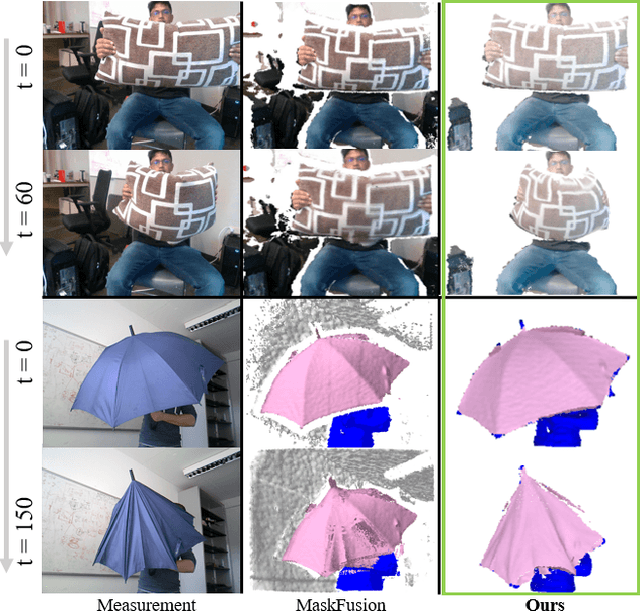
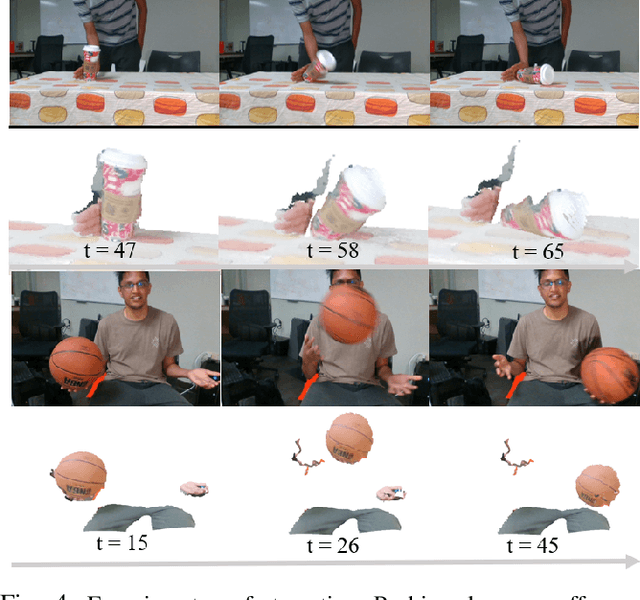
We present Mono-STAR, the first real-time 3D reconstruction system that simultaneously supports semantic fusion, fast motion tracking, non-rigid object deformation, and topological change under a unified framework. The proposed system solves a new optimization problem incorporating optical-flow-based 2D constraints to deal with fast motion and a novel semantic-aware deformation graph (SAD-graph) for handling topology change. We test the proposed system under various challenging scenes and demonstrate that it significantly outperforms existing state-of-the-art methods.
* This paper has been accepted by ICRA2023
Via