 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeometry-aware Compensation Scheme for Morphing Drones
Mar 09, 2020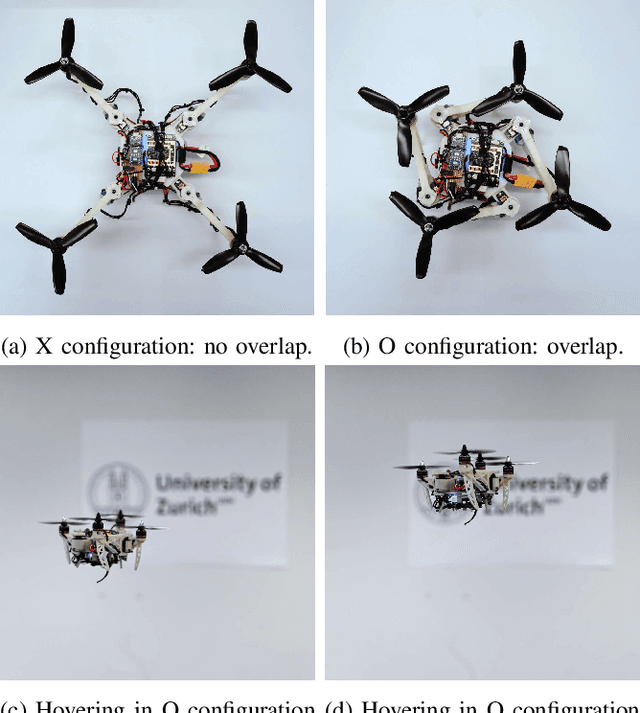
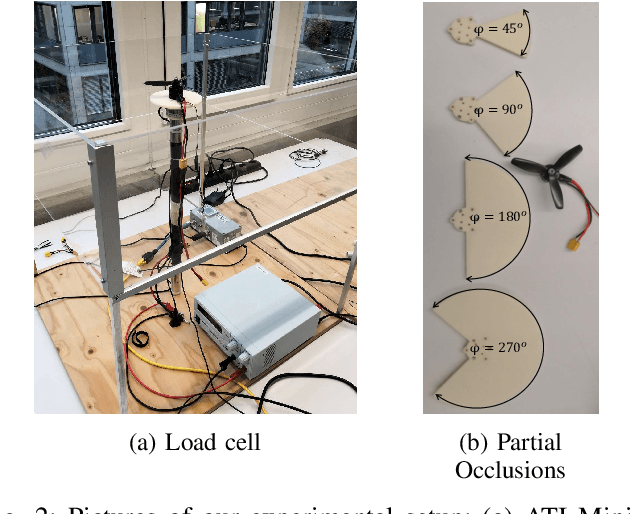
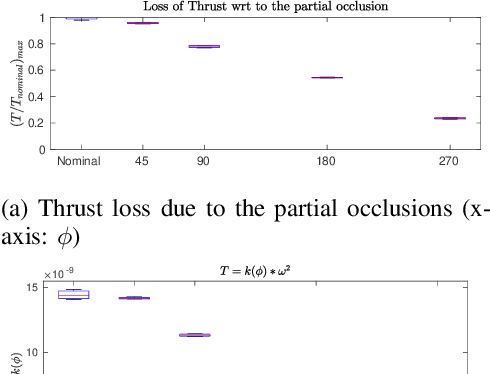
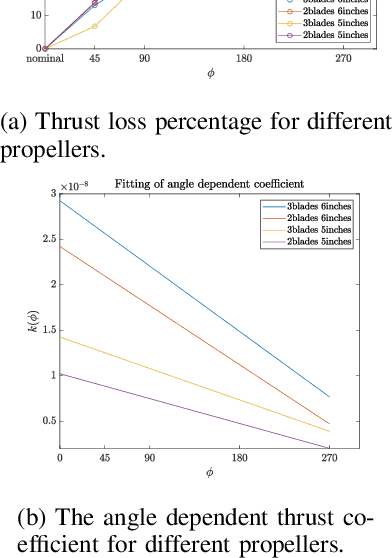
Morphing multirotors, such as the Foldable Drone , can increase the versatility of drones employing in-flight-adaptive-morphology. To further increase precision in their tasks, recent works have investigated stable flight in asymmetric morphologies mainly leveraging the low-level controller. However, the aerodynamic effects embedded in multirotors are only analyzed in fixed shape aerial vehicles and are completely ignored in morphing drones. In this paper, we investigate the effects of the partial overlap between the propellers and the main body of a morphing quadrotor. We perform experiments to characterize such effects and design a morphology-aware control scheme to account for them. To guarantee the right trade-off between efficiency and compactness of the vehicle, we propose a simple geometry-aware compensation scheme based on the results of these experiments. We demonstrate the effectiveness of our approach by deploying the compensation scheme on the Foldable Drone, a quadrotor that can fold its arms around the main body. The same set of experiments are performed and compared against one another by activating and deactivating the compensation scheme offline or during the flight. To the best of our knowledge, this is the first work counteracting the aerodynamic effects of a morphing quadrotor during flight and showing the effects of partial overlap between a propeller and the central body of the drone.
PAMPC: Perception-Aware Model Predictive Control for Quadrotors
Jul 10, 2018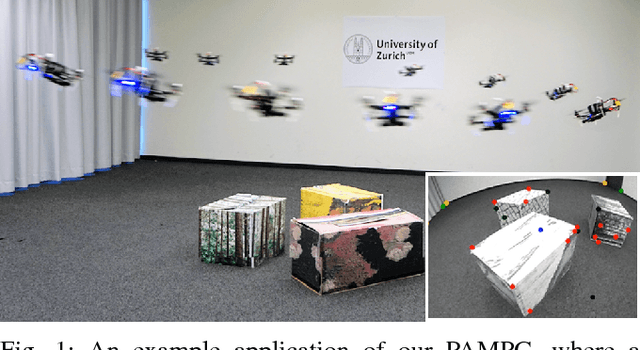
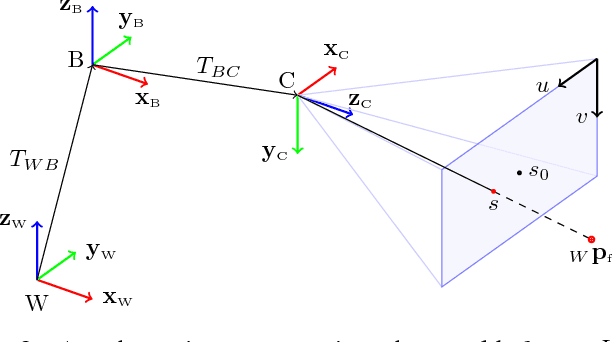
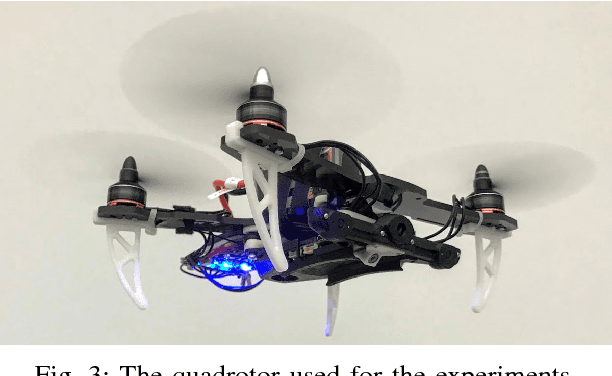
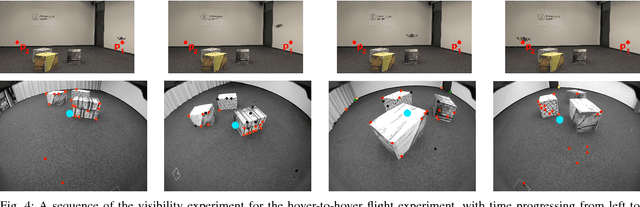
We present the first perception-aware model predictive control framework for quadrotors that unifies control and planning with respect to action and perception objectives. Our framework leverages numerical optimization to compute trajectories that satisfy the system dynamics and require control inputs within the limits of the platform. Simultaneously, it optimizes perception objectives for robust and reliable sens- ing by maximizing the visibility of a point of interest and minimizing its velocity in the image plane. Considering both perception and action objectives for motion planning and control is challenging due to the possible conflicts arising from their respective requirements. For example, for a quadrotor to track a reference trajectory, it needs to rotate to align its thrust with the direction of the desired acceleration. However, the perception objective might require to minimize such rotation to maximize the visibility of a point of interest. A model-based optimization framework, able to consider both perception and action objectives and couple them through the system dynamics, is therefore necessary. Our perception-aware model predictive control framework works in a receding-horizon fashion by iteratively solving a non-linear optimization problem. It is capable of running in real-time, fully onboard our lightweight, small-scale quadrotor using a low-power ARM computer, to- gether with a visual-inertial odometry pipeline. We validate our approach in experiments demonstrating (I) the contradiction between perception and action objectives, and (II) improved behavior in extremely challenging lighting conditions.
Aggressive Quadrotor Flight through Narrow Gaps with Onboard Sensing and Computing using Active Vision
Apr 05, 2018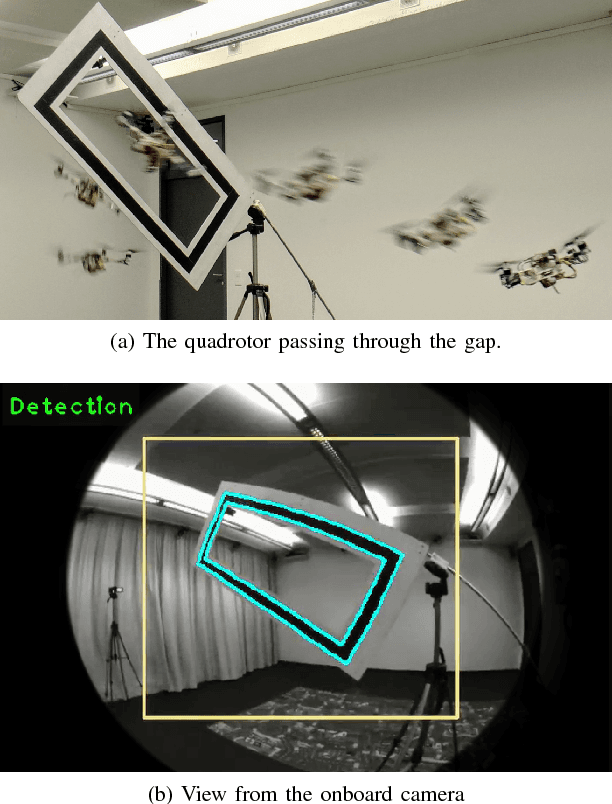
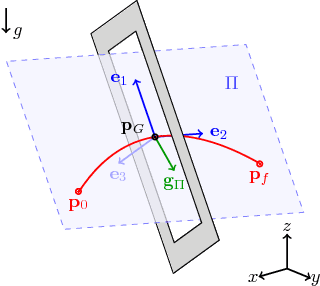

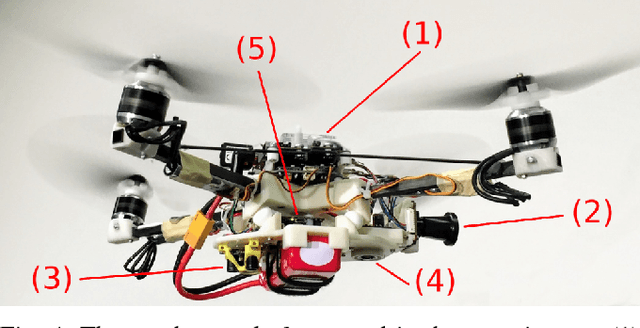
We address one of the main challenges towards autonomous quadrotor flight in complex environments, which is flight through narrow gaps. While previous works relied on off-board localization systems or on accurate prior knowledge of the gap position and orientation, we rely solely on onboard sensing and computing and estimate the full state by fusing gap detection from a single onboard camera with an IMU. This problem is challenging for two reasons: (i) the quadrotor pose uncertainty with respect to the gap increases quadratically with the distance from the gap; (ii) the quadrotor has to actively control its orientation towards the gap to enable state estimation (i.e., active vision). We solve this problem by generating a trajectory that considers geometric, dynamic, and perception constraints: during the approach maneuver, the quadrotor always faces the gap to allow state estimation, while respecting the vehicle dynamics; during the traverse through the gap, the distance of the quadrotor to the edges of the gap is maximized. Furthermore, we replan the trajectory during its execution to cope with the varying uncertainty of the state estimate. We successfully evaluate and demonstrate the proposed approach in many real experiments. To the best of our knowledge, this is the first work that addresses and achieves autonomous, aggressive flight through narrow gaps using only onboard sensing and computing and without prior knowledge of the pose of the gap.
A Real-Time Game Theoretic Planner for Autonomous Two-Player Drone Racing
Jan 26, 2018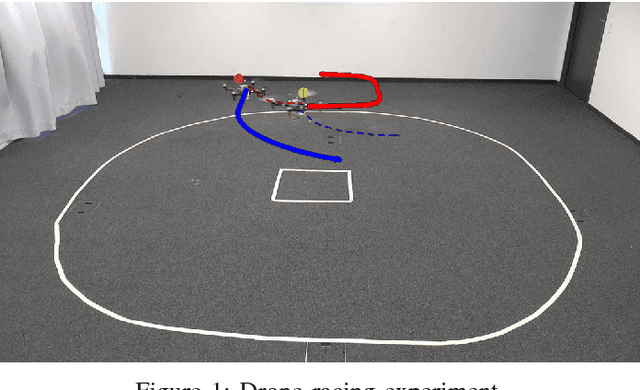
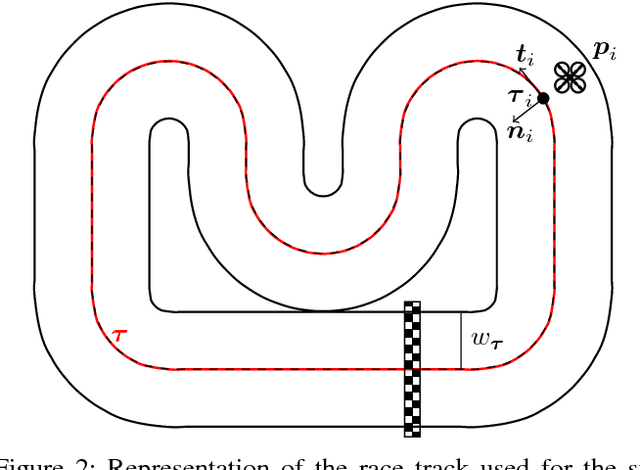
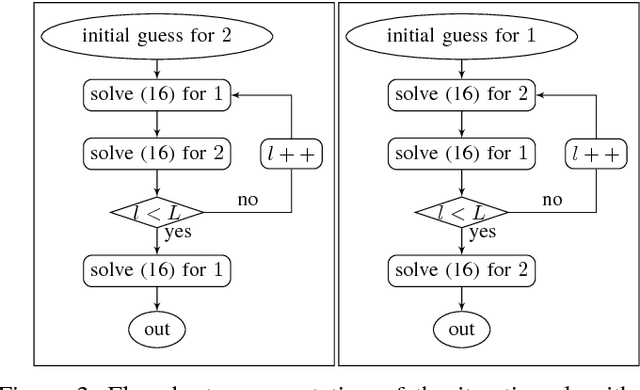
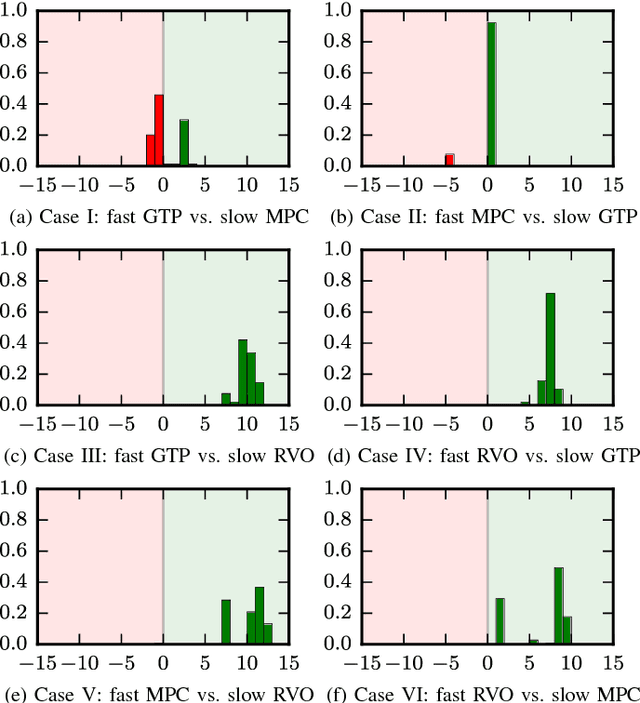
To be successful in multi-player drone racing, a player must not only follow the race track in an optimal way, but also compete with other drones through strategic blocking, faking, and opportunistic passing while avoiding collisions. Since unveiling one's own strategy to the adversaries is not desirable, this requires each player to independently predict the other players' future actions. Nash equilibria are a powerful tool to model this and similar multi-agent coordination problems in which the absence of communication impedes full coordination between the agents. In this paper, we propose a novel receding horizon planning algorithm that, exploiting sensitivity analysis within an iterated best response computational scheme, can approximate Nash equilibria in real time. We also describe a vision-based pipeline that allows each player to estimate its opponent's relative position. We demonstrate that our solution effectively competes against alternative strategies in a large number of drone racing simulations. Hardware experiments with onboard vision sensing prove the practicality of our strategy.