 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Real-Time Game Theoretic Planner for Autonomous Two-Player Drone Racing
Jan 26, 2018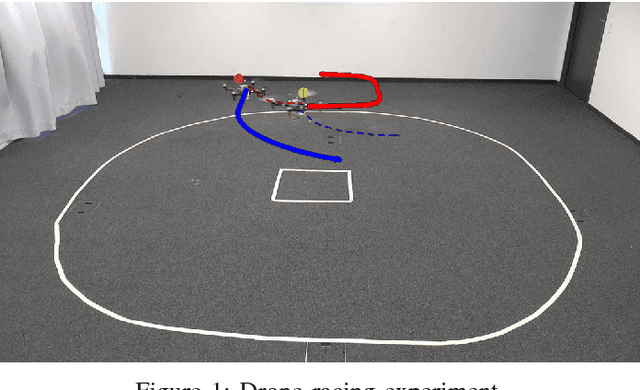
To be successful in multi-player drone racing, a player must not only follow the race track in an optimal way, but also compete with other drones through strategic blocking, faking, and opportunistic passing while avoiding collisions. Since unveiling one's own strategy to the adversaries is not desirable, this requires each player to independently predict the other players' future actions. Nash equilibria are a powerful tool to model this and similar multi-agent coordination problems in which the absence of communication impedes full coordination between the agents. In this paper, we propose a novel receding horizon planning algorithm that, exploiting sensitivity analysis within an iterated best response computational scheme, can approximate Nash equilibria in real time. We also describe a vision-based pipeline that allows each player to estimate its opponent's relative position. We demonstrate that our solution effectively competes against alternative strategies in a large number of drone racing simulations. Hardware experiments with onboard vision sensing prove the practicality of our strategy.