 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDepth-Aware Action Recognition: Pose-Motion Encoding through Temporal Heatmaps
Nov 26, 2020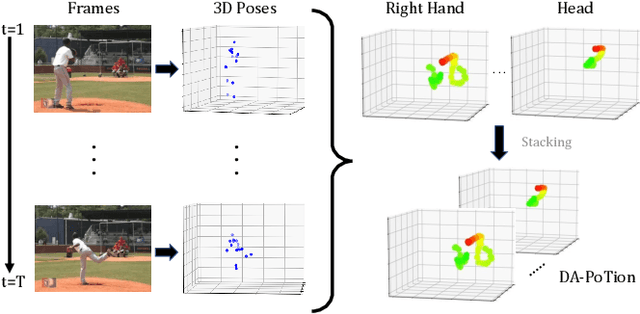
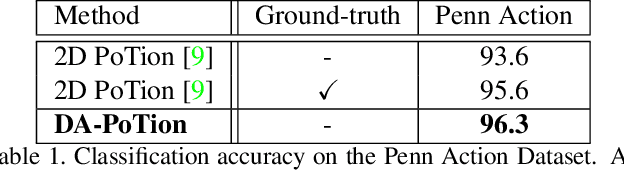
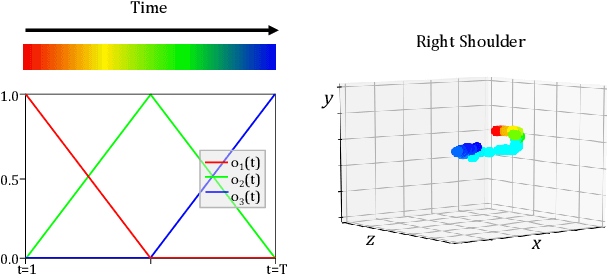
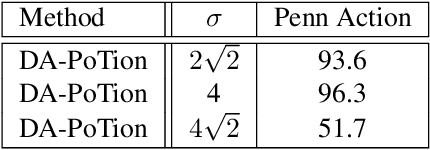
Most state-of-the-art methods for action recognition rely only on 2D spatial features encoding appearance, motion or pose. However, 2D data lacks the depth information, which is crucial for recognizing fine-grained actions. In this paper, we propose a depth-aware volumetric descriptor that encodes pose and motion information in a unified representation for action classification in-the-wild. Our framework is robust to many challenges inherent to action recognition, e.g. variation in viewpoint, scene, clothing and body shape. The key component of our method is the Depth-Aware Pose Motion representation (DA-PoTion), a new video descriptor that encodes the 3D movement of semantic keypoints of the human body. Given a video, we produce human joint heatmaps for each frame using a state-of-the-art 3D human pose regressor and we give each of them a unique color code according to the relative time in the clip. Then, we aggregate such 3D time-encoded heatmaps for all human joints to obtain a fixed-size descriptor (DA-PoTion), which is suitable for classifying actions using a shallow 3D convolutional neural network (CNN). The DA-PoTion alone defines a new state-of-the-art on the Penn Action Dataset. Moreover, we leverage the intrinsic complementarity of our pose motion descriptor with appearance based approaches by combining it with Inflated 3D ConvNet (I3D) to define a new state-of-the-art on the JHMDB Dataset.
Geometry-aware Compensation Scheme for Morphing Drones
Mar 09, 2020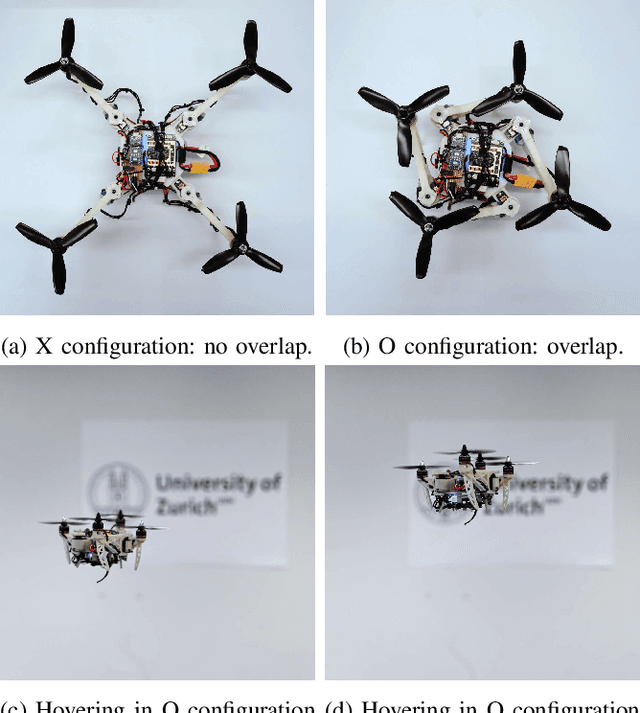
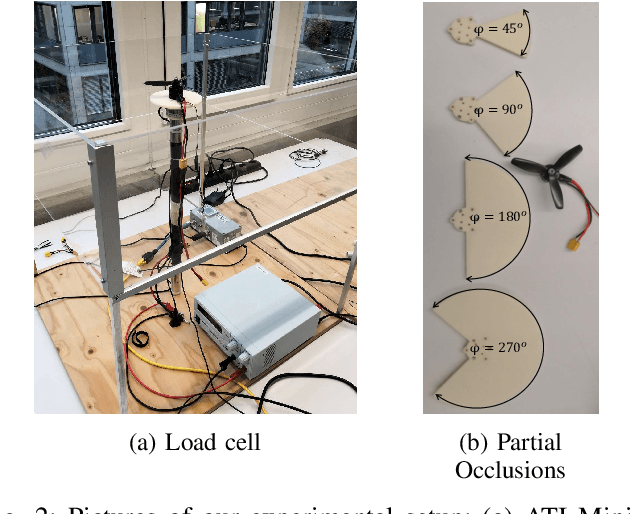
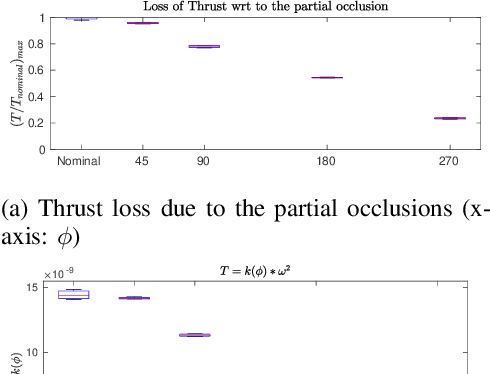
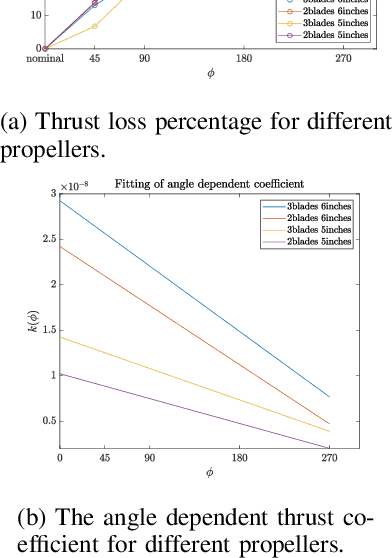
Morphing multirotors, such as the Foldable Drone , can increase the versatility of drones employing in-flight-adaptive-morphology. To further increase precision in their tasks, recent works have investigated stable flight in asymmetric morphologies mainly leveraging the low-level controller. However, the aerodynamic effects embedded in multirotors are only analyzed in fixed shape aerial vehicles and are completely ignored in morphing drones. In this paper, we investigate the effects of the partial overlap between the propellers and the main body of a morphing quadrotor. We perform experiments to characterize such effects and design a morphology-aware control scheme to account for them. To guarantee the right trade-off between efficiency and compactness of the vehicle, we propose a simple geometry-aware compensation scheme based on the results of these experiments. We demonstrate the effectiveness of our approach by deploying the compensation scheme on the Foldable Drone, a quadrotor that can fold its arms around the main body. The same set of experiments are performed and compared against one another by activating and deactivating the compensation scheme offline or during the flight. To the best of our knowledge, this is the first work counteracting the aerodynamic effects of a morphing quadrotor during flight and showing the effects of partial overlap between a propeller and the central body of the drone.