 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCulinaryCut-VLAP: A Vision-Language-Action-Physics Framework for Food Cutting via a Force-Aware Material Point Method
Jan 10, 2026Food cutting is a highly practical yet underexplored application at the intersection of vision and robotic manipulation. The task remains challenging because interactions between the knife and deformable materials are highly nonlinear and often entail large deformations, frequent contact, and topological change, which in turn hinder stable and safe large-scale data collection. To address these challenges, we propose a unified framework that couples a vision-language-action (VLA) dataset with a physically realistic cutting simulator built on the material point method (MPM). Our simulator adopts MLS-MPM as its computational core, reducing numerical dissipation and energy drift while preserving rotational and shear responses even under topology-changing cuts. During cutting, forces and stress distributions are estimated from impulse exchanges between particles and the grid, enabling stable tracking of transient contact forces and energy transfer. We also provide a benchmark dataset that integrates diverse cutting trajectories, multi-view visual observations, and fine-grained language instructions, together with force--torque and tool--pose labels to provide physically consistent training signals. These components realize a learning--evaluation loop that respects the core physics of cutting and establishes a safe, reproducible, and scalable foundation for advancing VLA models in deformable object manipulation.
Building Machine Learning Challenges for Anomaly Detection in Science
Mar 03, 2025



Scientific discoveries are often made by finding a pattern or object that was not predicted by the known rules of science. Oftentimes, these anomalous events or objects that do not conform to the norms are an indication that the rules of science governing the data are incomplete, and something new needs to be present to explain these unexpected outliers. The challenge of finding anomalies can be confounding since it requires codifying a complete knowledge of the known scientific behaviors and then projecting these known behaviors on the data to look for deviations. When utilizing machine learning, this presents a particular challenge since we require that the model not only understands scientific data perfectly but also recognizes when the data is inconsistent and out of the scope of its trained behavior. In this paper, we present three datasets aimed at developing machine learning-based anomaly detection for disparate scientific domains covering astrophysics, genomics, and polar science. We present the different datasets along with a scheme to make machine learning challenges around the three datasets findable, accessible, interoperable, and reusable (FAIR). Furthermore, we present an approach that generalizes to future machine learning challenges, enabling the possibility of large, more compute-intensive challenges that can ultimately lead to scientific discovery.
Anvil: An integration of artificial intelligence, sampling techniques, and a combined CAD-CFD tool
Jun 24, 2024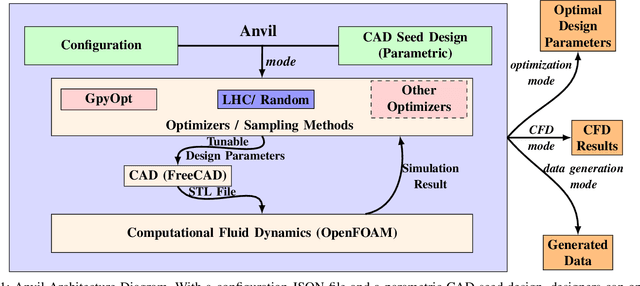
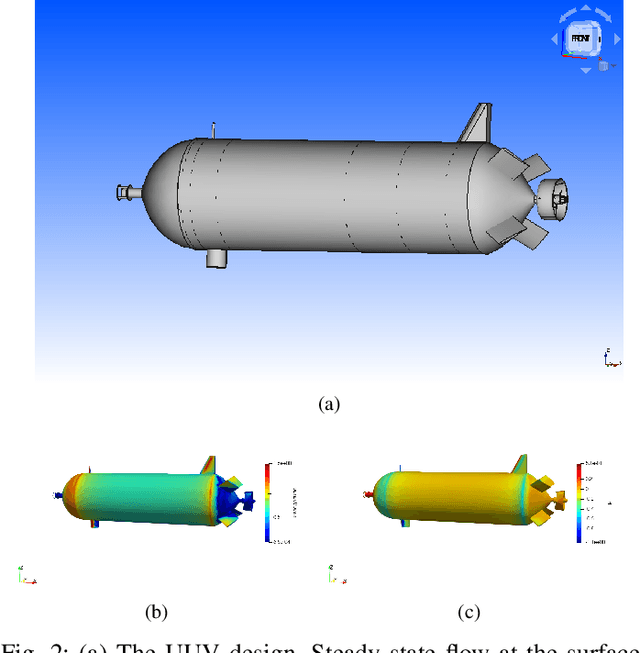
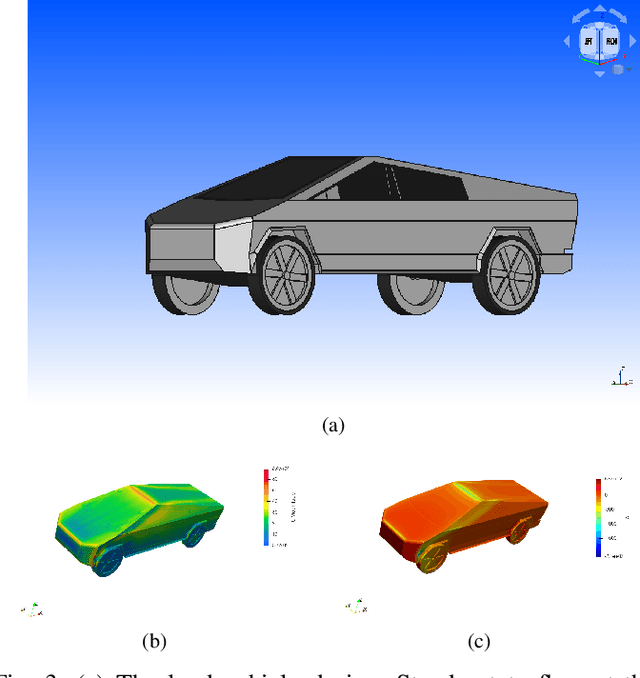
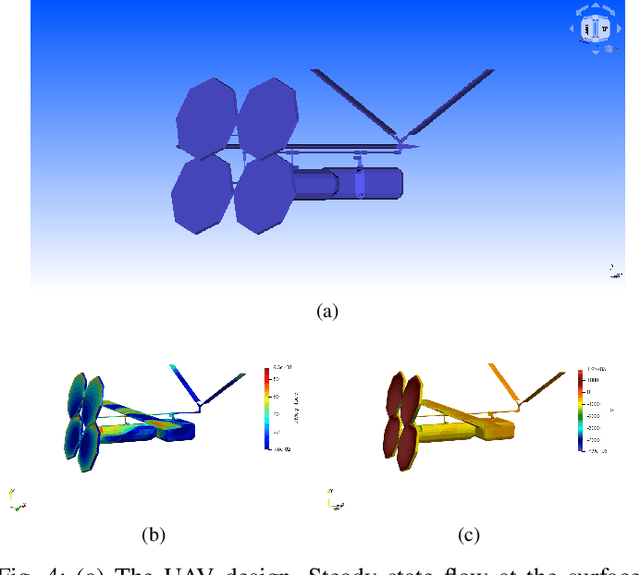
In this work, we introduce an open-source integrated CAD-CFD tool, Anvil, which combines FreeCAD for CAD modeling and OpenFOAM for CFD analysis, along with an AI-based optimization method (Bayesian optimization) and other sampling algorithms. Anvil serves as a scientific machine learning tool for shape optimization in three modes: data generation, CFD evaluation, and shape optimization. In data generation mode, it automatically runs CFD evaluations and generates data for training a surrogate model. In optimization mode, it searches for the optimal design under given requirements and optimization metrics. In CFD mode, a single CAD file can be evaluated with a single OpenFOAM run. To use Anvil, experimenters provide a JSON configuration file and a parametric CAD seed design. Anvil can be used to study solid-fluid dynamics for any subsonic flow conditions and has been demonstrated in various simulation and optimization use cases. The open-source code for the tool, installation process, artifacts (such as CAD seed designs and example STL models), experimentation results, and detailed documentation can be found at \url{https://github.com/symbench/Anvil}.
Sample-Efficient and Surrogate-Based Design Optimization of Underwater Vehicle Hulls
Apr 24, 2023Physics simulations are a computational bottleneck in computer-aided design (CAD) optimization processes. Hence, in order to make accurate (computationally expensive) simulations feasible for use in design optimization, one requires either an optimization framework that is highly sample-efficient or fast data-driven proxies (surrogate models) for long running simulations. In this work, we leverage recent advances in optimization and artificial intelligence (AI) to address both of these potential solutions, in the context of designing an optimal unmanned underwater vehicle (UUV). We first investigate and compare the sample efficiency and convergence behavior of different optimization techniques with a standard computational fluid dynamics (CFD) solver in the optimization loop. We then develop a deep neural network (DNN) based surrogate model to approximate drag forces that would otherwise be computed via direct numerical simulation with the CFD solver. The surrogate model is in turn used in the optimization loop of the hull design. Our study finds that the Bayesian Optimization Lower Condition Bound (BO LCB) algorithm is the most sample-efficient optimization framework and has the best convergence behavior of those considered. Subsequently, we show that our DNN-based surrogate model predicts drag force on test data in tight agreement with CFD simulations, with a mean absolute percentage error (MAPE) of 1.85%. Combining these results, we demonstrate a two-orders-of-magnitude speedup (with comparable accuracy) for the design optimization process when the surrogate model is used. To our knowledge, this is the first study applying Bayesian optimization and DNN-based surrogate modeling to the problem of UUV design optimization, and we share our developments as open-source software.
A Deep Gradient Correction Method for Iteratively Solving Linear Systems
May 22, 2022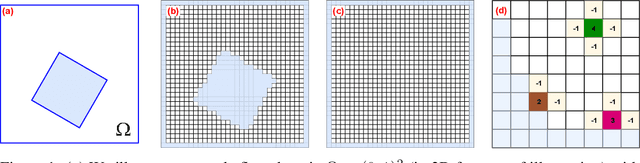
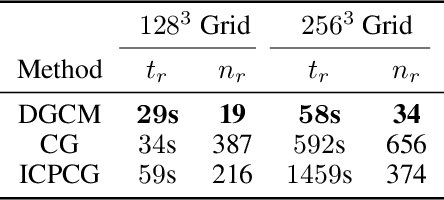
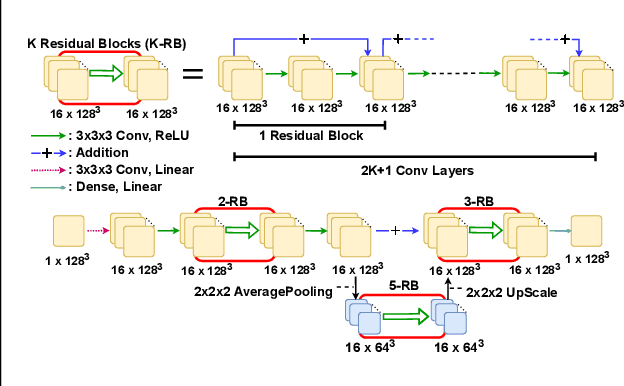
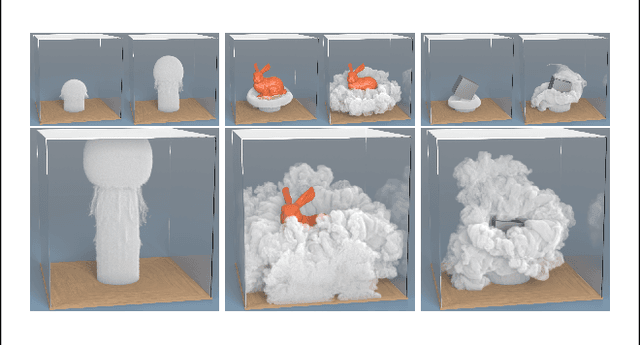
We present a novel deep learning approach to approximate the solution of large, sparse, symmetric, positive-definite linear systems of equations. These systems arise from many problems in applied science, e.g., in numerical methods for partial differential equations. Algorithms for approximating the solution to these systems are often the bottleneck in problems that require their solution, particularly for modern applications that require many millions of unknowns. Indeed, numerical linear algebra techniques have been investigated for many decades to alleviate this computational burden. Recently, data-driven techniques have also shown promise for these problems. Motivated by the conjugate gradients algorithm that iteratively selects search directions for minimizing the matrix norm of the approximation error, we design an approach that utilizes a deep neural network to accelerate convergence via data-driven improvement of the search directions. Our method leverages a carefully chosen convolutional network to approximate the action of the inverse of the linear operator up to an arbitrary constant. We train the network using unsupervised learning with a loss function equal to the $L^2$ difference between an input and the system matrix times the network evaluation, where the unspecified constant in the approximate inverse is accounted for. We demonstrate the efficacy of our approach on spatially discretized Poisson equations with millions of degrees of freedom arising in computational fluid dynamics applications. Unlike state-of-the-art learning approaches, our algorithm is capable of reducing the linear system residual to a given tolerance in a small number of iterations, independent of the problem size. Moreover, our method generalizes effectively to various systems beyond those encountered during training.