 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePersonalizing Student-Agent Interactions Using Log-Contextualized Retrieval Augmented Generation (RAG)
May 22, 2025Collaborative dialogue offers rich insights into students' learning and critical thinking. This is essential for adapting pedagogical agents to students' learning and problem-solving skills in STEM+C settings. While large language models (LLMs) facilitate dynamic pedagogical interactions, potential hallucinations can undermine confidence, trust, and instructional value. Retrieval-augmented generation (RAG) grounds LLM outputs in curated knowledge, but its effectiveness depends on clear semantic links between user input and a knowledge base, which are often weak in student dialogue. We propose log-contextualized RAG (LC-RAG), which enhances RAG retrieval by incorporating environment logs to contextualize collaborative discourse. Our findings show that LC-RAG improves retrieval over a discourse-only baseline and allows our collaborative peer agent, Copa, to deliver relevant, personalized guidance that supports students' critical thinking and epistemic decision-making in a collaborative computational modeling environment, XYZ.
Anvil: An integration of artificial intelligence, sampling techniques, and a combined CAD-CFD tool
Jun 24, 2024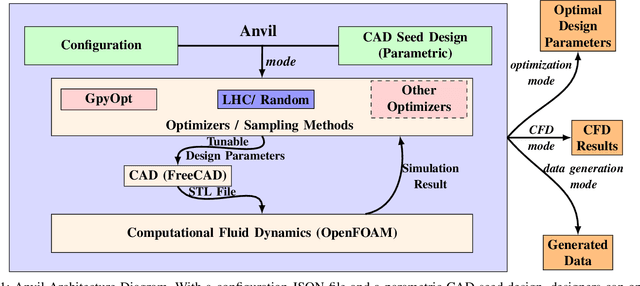
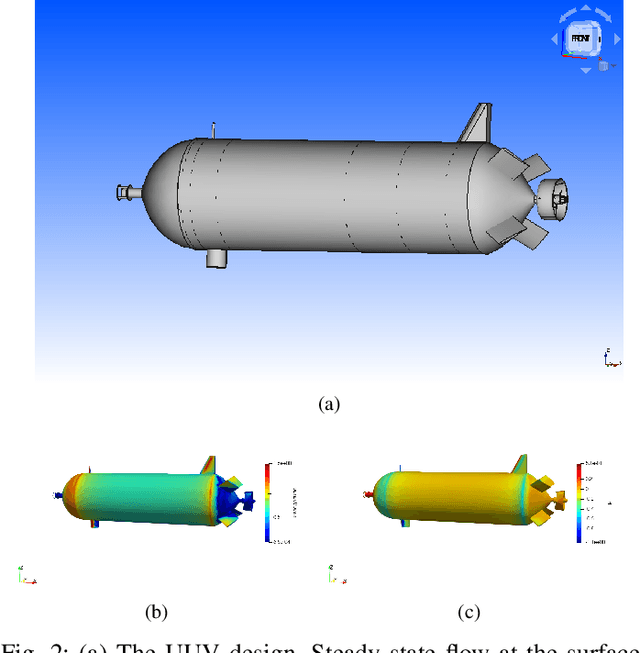
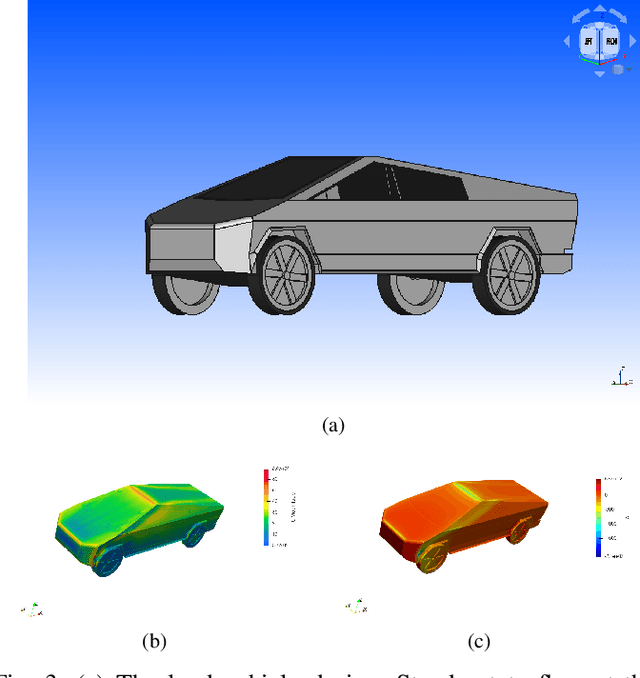
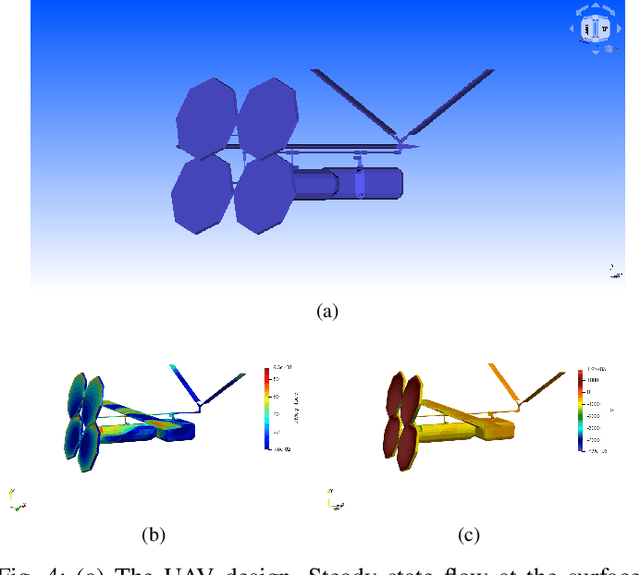
In this work, we introduce an open-source integrated CAD-CFD tool, Anvil, which combines FreeCAD for CAD modeling and OpenFOAM for CFD analysis, along with an AI-based optimization method (Bayesian optimization) and other sampling algorithms. Anvil serves as a scientific machine learning tool for shape optimization in three modes: data generation, CFD evaluation, and shape optimization. In data generation mode, it automatically runs CFD evaluations and generates data for training a surrogate model. In optimization mode, it searches for the optimal design under given requirements and optimization metrics. In CFD mode, a single CAD file can be evaluated with a single OpenFOAM run. To use Anvil, experimenters provide a JSON configuration file and a parametric CAD seed design. Anvil can be used to study solid-fluid dynamics for any subsonic flow conditions and has been demonstrated in various simulation and optimization use cases. The open-source code for the tool, installation process, artifacts (such as CAD seed designs and example STL models), experimentation results, and detailed documentation can be found at \url{https://github.com/symbench/Anvil}.
3D Gaze Tracking for Studying Collaborative Interactions in Mixed-Reality Environments
Jun 16, 2024This study presents a novel framework for 3D gaze tracking tailored for mixed-reality settings, aimed at enhancing joint attention and collaborative efforts in team-based scenarios. Conventional gaze tracking, often limited by monocular cameras and traditional eye-tracking apparatus, struggles with simultaneous data synchronization and analysis from multiple participants in group contexts. Our proposed framework leverages state-of-the-art computer vision and machine learning techniques to overcome these obstacles, enabling precise 3D gaze estimation without dependence on specialized hardware or complex data fusion. Utilizing facial recognition and deep learning, the framework achieves real-time, tracking of gaze patterns across several individuals, addressing common depth estimation errors, and ensuring spatial and identity consistency within the dataset. Empirical results demonstrate the accuracy and reliability of our method in group environments. This provides mechanisms for significant advances in behavior and interaction analysis in educational and professional training applications in dynamic and unstructured environments.
Sample-Efficient and Surrogate-Based Design Optimization of Underwater Vehicle Hulls
Apr 24, 2023Physics simulations are a computational bottleneck in computer-aided design (CAD) optimization processes. Hence, in order to make accurate (computationally expensive) simulations feasible for use in design optimization, one requires either an optimization framework that is highly sample-efficient or fast data-driven proxies (surrogate models) for long running simulations. In this work, we leverage recent advances in optimization and artificial intelligence (AI) to address both of these potential solutions, in the context of designing an optimal unmanned underwater vehicle (UUV). We first investigate and compare the sample efficiency and convergence behavior of different optimization techniques with a standard computational fluid dynamics (CFD) solver in the optimization loop. We then develop a deep neural network (DNN) based surrogate model to approximate drag forces that would otherwise be computed via direct numerical simulation with the CFD solver. The surrogate model is in turn used in the optimization loop of the hull design. Our study finds that the Bayesian Optimization Lower Condition Bound (BO LCB) algorithm is the most sample-efficient optimization framework and has the best convergence behavior of those considered. Subsequently, we show that our DNN-based surrogate model predicts drag force on test data in tight agreement with CFD simulations, with a mean absolute percentage error (MAPE) of 1.85%. Combining these results, we demonstrate a two-orders-of-magnitude speedup (with comparable accuracy) for the design optimization process when the surrogate model is used. To our knowledge, this is the first study applying Bayesian optimization and DNN-based surrogate modeling to the problem of UUV design optimization, and we share our developments as open-source software.
Data efficient surrogate modeling for engineering design: Ensemble-free batch mode deep active learning for regression
Nov 16, 2022In a computer-aided engineering design optimization problem that involves notoriously complex and time-consuming simulator, the prevalent approach is to replace these simulations with a data-driven surrogate that approximates the simulator's behavior at a much cheaper cost. The main challenge in creating an inexpensive data-driven surrogate is the generation of a sheer number of data using these computationally expensive numerical simulations. In such cases, Active Learning (AL) methods have been used that attempt to learn an input--output behavior while labeling the fewest samples possible. The current trend in AL for a regression problem is dominated by the Bayesian framework that needs training an ensemble of learning models that makes surrogate training computationally tedious if the underlying learning model is Deep Neural Networks (DNNs). However, DNNs have an excellent capability to learn highly nonlinear and complex relationships even for a very high dimensional problem. To leverage the excellent learning capability of deep networks along with avoiding the computational complexity of the Bayesian paradigm, in this work we propose a simple and scalable approach for active learning that works in a student-teacher manner to train a surrogate model. By using this proposed approach, we are able to achieve the same level of surrogate accuracy as the other baselines like DBAL and Monte Carlo sampling with up to 40 % fewer samples. We empirically evaluated this method on multiple use cases including three different engineering design domains:finite element analysis, computational fluid dynamics, and propeller design.