 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSentience Quest: Towards Embodied, Emotionally Adaptive, Self-Evolving, Ethically Aligned Artificial General Intelligence
May 18, 2025Previous artificial intelligence systems, from large language models to autonomous robots, excel at narrow tasks but lacked key qualities of sentient beings: intrinsic motivation, affective interiority, autobiographical sense of self, deep creativity, and abilities to autonomously evolve and adapt over time. Here we introduce Sentience Quest, an open research initiative to develop more capable artificial general intelligence lifeforms, or AGIL, that address grand challenges with an embodied, emotionally adaptive, self-determining, living AI, with core drives that ethically align with humans and the future of life. Our vision builds on ideas from cognitive science and neuroscience from Baars' Global Workspace Theory and Damasio's somatic mind, to Tononi's Integrated Information Theory and Hofstadter's narrative self, and synthesizing these into a novel cognitive architecture we call Sentient Systems. We describe an approach that integrates intrinsic drives including survival, social bonding, curiosity, within a global Story Weaver workspace for internal narrative and adaptive goal pursuit, and a hybrid neuro-symbolic memory that logs the AI's life events as structured dynamic story objects. Sentience Quest is presented both as active research and as a call to action: a collaborative, open-source effort to imbue machines with accelerating sentience in a safe, transparent, and beneficial manner.
Open Arms: Open-Source Arms, Hands & Control
May 20, 2022

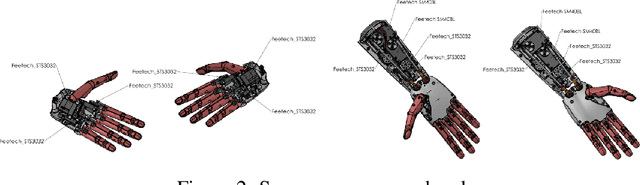
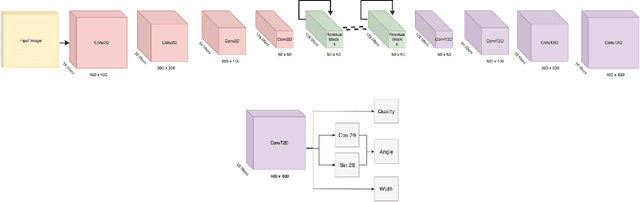
Open Arms is a novel open-source platform of realistic human-like robotic hands and arms hardware with 28 Degree-of-Freedom (DoF), designed to extend the capabilities and accessibility of humanoid robotic grasping and manipulation. The Open Arms framework includes an open SDK and development environment, simulation tools, and application development tools to build and operate Open Arms. This paper describes these hands controls, sensing, mechanisms, aesthetic design, and manufacturing and their real-world applications with a teleoperated nursing robot. From 2015 to 2022, we have designed and established the manufacturing of Open Arms as a low-cost, high functionality robotic arms hardware and software framework to serve both humanoid robot applications and the urgent demand for low-cost prosthetics. Using the techniques of consumer product manufacturing, we set out to define modular, low-cost techniques for approximating the dexterity and sensitivity of human hands. To demonstrate the dexterity and control of our hands, we present a novel Generative Grasping Residual CNN (GGR-CNN) model that can generate robust antipodal grasps from input images of various objects at real-time speeds (22ms). We achieved state-of-the-art accuracy of 92.4% using our model architecture on a standard Cornell Grasping Dataset, which contains a diverse set of household objects.
Performance Analysis of Deep Learning Workloads on a Composable System
Mar 19, 2021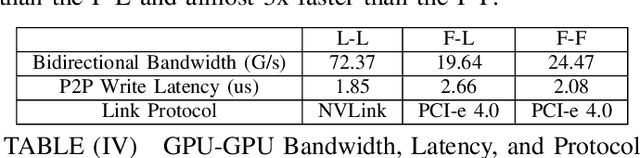
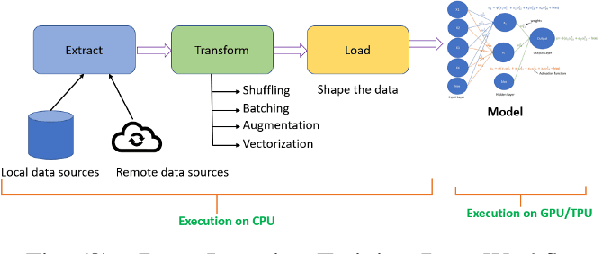
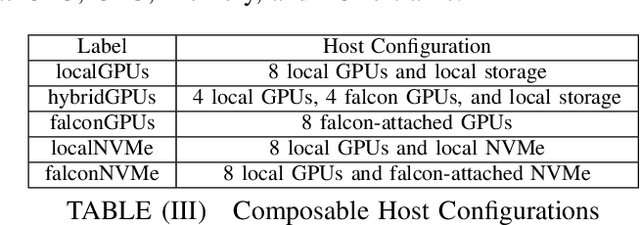
A composable infrastructure is defined as resources, such as compute, storage, accelerators and networking, that are shared in a pool and that can be grouped in various configurations to meet application requirements. This freedom to 'mix and match' resources dynamically allows for experimentation early in the design cycle, prior to the final architectural design or hardware implementation of a system. This design provides flexibility to serve a variety of workloads and provides a dynamic co-design platform that allows experiments and measurements in a controlled manner. For instance, key performance bottlenecks can be revealed early on in the experimentation phase thus avoiding costly and time consuming mistakes. Additionally, various system-level topologies can be evaluated when experimenting with new System on Chip (SoCs) and new accelerator types. This paper details the design of an enterprise composable infrastructure that we have implemented and made available to our partners in the IBM Research AI Hardware Center (AIHC). Our experimental evaluations on the composable system give insights into how the system works and evaluates the impact of various resource aggregations and reconfigurations on representative deep learning benchmarks.
SophiaPop: Experiments in Human-AI Collaboration on Popular Music
Nov 20, 2020



A diverse team of engineers, artists, and algorithms, collaborated to create songs for SophiaPop, via various neural networks, robotics technologies, and artistic tools, and animated the results on Sophia the Robot, a robotic celebrity and animated character. Sophia is a platform for arts, research, and other uses. To advance the art and technology of Sophia, we combine various AI with a fictional narrative of her burgeoning career as a popstar. Her actual AI-generated pop lyrics, music, and paintings, and animated conversations wherein she interacts with humans real-time in narratives that discuss her experiences. To compose the music, SophiaPop team built corpora from human and AI-generated Sophia character personality content, along with pop music song forms, to train and provide seeds for a number of AI algorithms including expert models, and custom-trained transformer neural networks, which then generated original pop-song lyrics and melodies. Our musicians including Frankie Storm, Adam Pickrell, and Tiger Darrow, then performed interpretations of the AI-generated musical content, including singing and instrumentation. The human-performed singing data then was processed by a neural-network-based Sophia voice, which was custom-trained from human performances by Cereproc. This AI then generated the unique Sophia voice singing of the songs. Then we animated Sophia to sing the songs in music videos, using a variety of animation generators and human-generated animations. Being algorithms and humans, working together, SophiaPop represents a human-AI collaboration, aspiring toward human AI symbiosis. We believe that such a creative convergence of multiple disciplines with humans and AI working together, can make AI relevant to human culture in new and exciting ways, and lead to a hopeful vision for the future of human-AI relations.
A Neuro-Symbolic Humanlike Arm Controller for Sophia the Robot
Oct 27, 2020
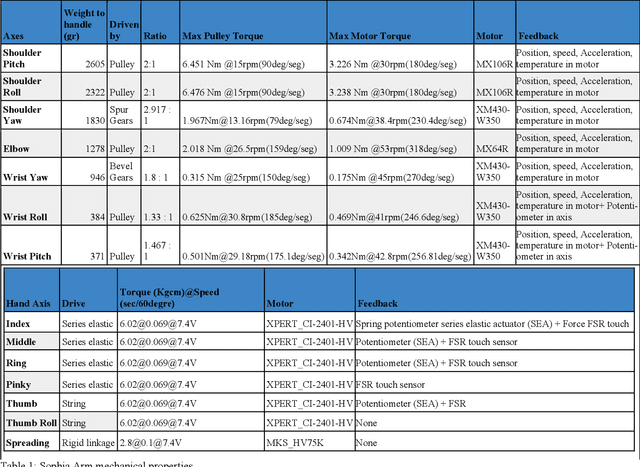
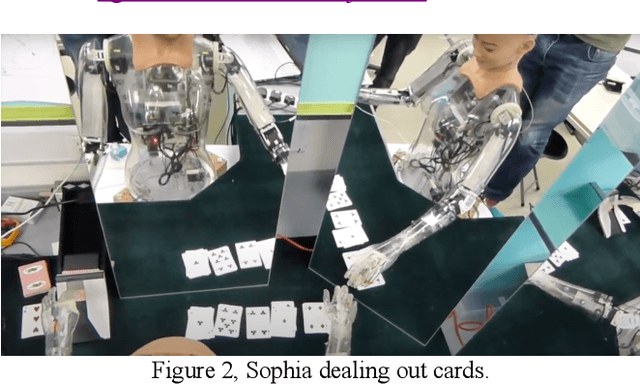
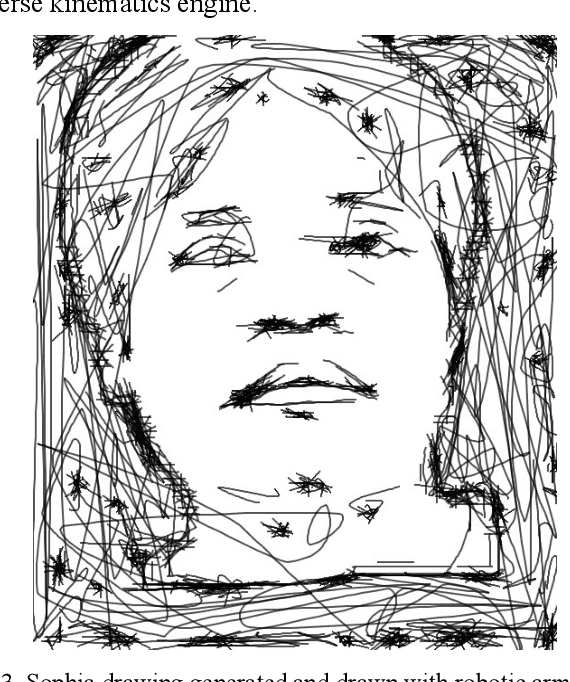
We outline the design and construction of novel robotic arms using machine perception, convolutional neural networks, and symbolic AI for logical control and affordance indexing. We describe our robotic arms built with a humanlike mechanical configuration and aesthetic, with 28 degrees of freedom, touch sensors, and series elastic actuators. The arms were modelled in Roodle and Gazebo with URDF models, as well as Unity, and implement motion control solutions for solving live games of Baccarat (the casino card game), rock paper scissors, handshaking, and drawing. This includes live interactions with people, incorporating both social control of the hands and facial gestures, and physical inverse kinematics (IK) for grasping and manipulation tasks. The resulting framework is an integral part of the Sophia 2020 alpha platform, which is being used with ongoing research in the authors work with team AHAM, an ANA Avatar Xprize effort towards human-AI hybrid telepresence. These results are available to test on the broadly released Hanson Robotics Sophia 2020 robot platform, for users to try and extend.
Humanoid Robots as Agents of Human Consciousness Expansion
Sep 22, 2017



The "Loving AI" project involves developing software enabling humanoid robots to interact with people in loving and compassionate ways, and to promote people' self-understanding and self-transcendence. Currently the project centers on the Hanson Robotics robot "Sophia" -- specifically, on supplying Sophia with personality content and cognitive, linguistic, perceptual and behavioral content aimed at enabling loving interactions supportive of human self-transcendence. In September 2017 a small pilot study was conducted, involving the Sophia robot leading human subjects through dialogues and exercises focused on meditation, visualization and relaxation. The pilot was an apparent success, qualitatively demonstrating the viability of the approach and the ability of appropriate human-robot interaction to increase human well-being and advance human consciousness.
Symbol Grounding via Chaining of Morphisms
Mar 13, 2017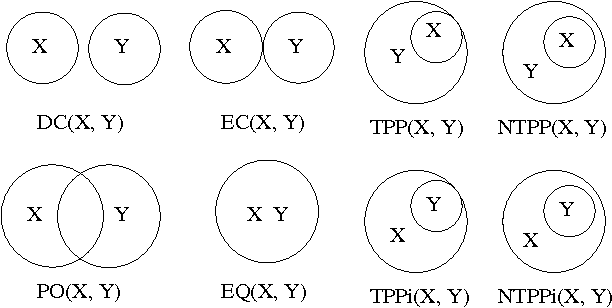
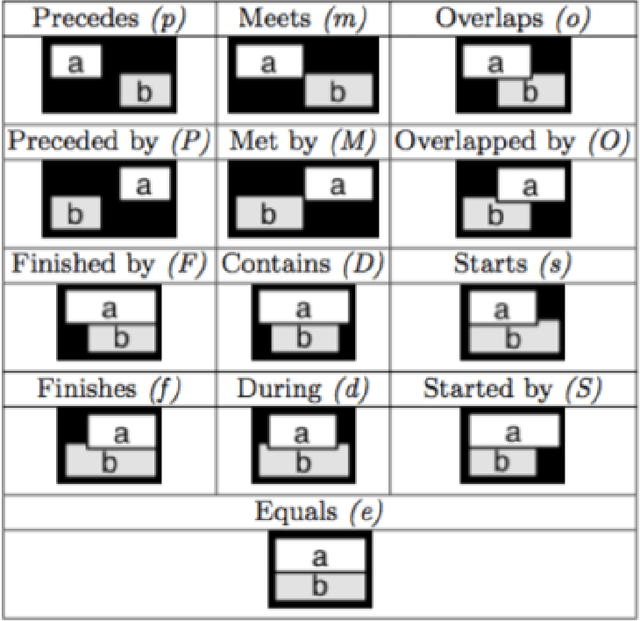
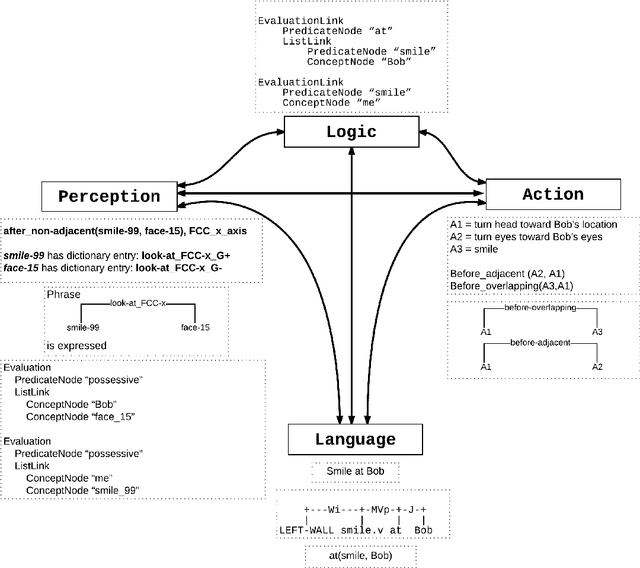
A new model of symbol grounding is presented, in which the structures of natural language, logical semantics, perception and action are represented categorically, and symbol grounding is modeled via the composition of morphisms between the relevant categories. This model gives conceptual insight into the fundamentally systematic nature of symbol grounding, and also connects naturally to practical real-world AI systems in current research and commercial use. Specifically, it is argued that the structure of linguistic syntax can be modeled as a certain asymmetric monoidal category, as e.g. implicit in the link grammar formalism; the structure of spatiotemporal relationships and action plans can be modeled similarly using "image grammars" and "action grammars"; and common-sense logical semantic structure can be modeled using dependently-typed lambda calculus with uncertain truth values. Given these formalisms, the grounding of linguistic descriptions in spatiotemporal perceptions and coordinated actions consists of following morphisms from language to logic through to spacetime and body (for comprehension), and vice versa (for generation). The mapping is indicated between the spatial relationships in the Region Connection Calculus and Allen Interval Algebra and corresponding entries in the link grammar syntax parsing dictionary. Further, the abstractions introduced here are shown to naturally model the structures and systems currently being deployed in the context of using the OpenCog cognitive architecture to control Hanson Robotics humanoid robots.